受欢迎的网站建设案例wordpress缩略图不清晰怎么办
进入某个TCP/UDP协议的API文档详情页,点击文档上方 测试 标签,即可进入 API 测试页,系统会根据API文档的定义的求头部、Query参数、请求体自动生成测试界面并且填充测试数据。
填写/修改请求参数
1.1设置请求参数
与发起HTTP协议测试类似,您可以通过设置或者导入请求参数。
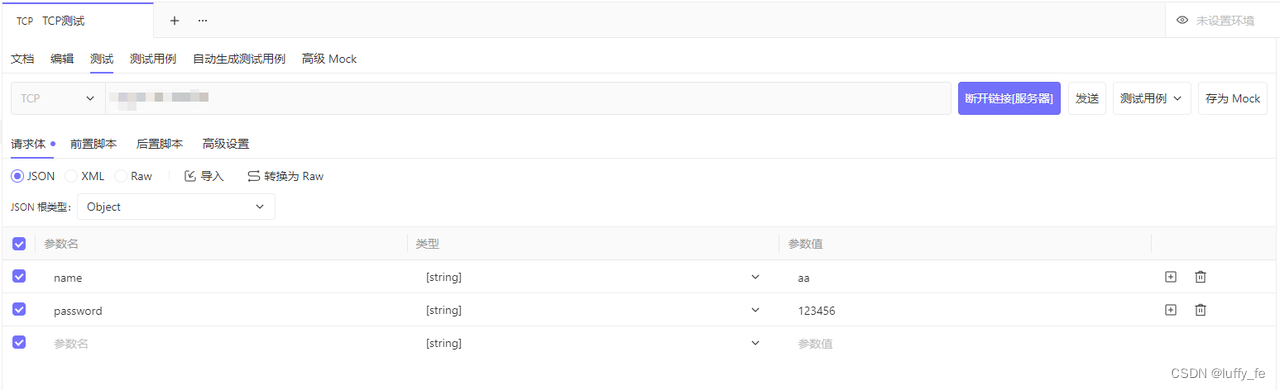
1.2设置请求体
WS/WSS协议请求体提供了三种类型:
-
JSON
-
XML
-
Raw(自定义文本类型数据)
-
Eolink提供了的 JSON 和 XML 编辑器,当您已经在 API 文档中定义好 API 的请求数据结构时,只需要在测试界面填写各个字段的值或导入请求参数,系统会自动转换为相应的 JSON 和 XML 结构的请求数据。
1.3建立连接
与WS/WSS接口测试类似,需要完成一次握手,两者之间就直接可以创建持久性的连接,连接建立以后,浏览器就可以通过TCP连接发送数据。
点击 建立连接 即可与服务器建立连接。

发送请求查看返回结果
建立连接之后,填写或导入请求参数,点击 发送 即可发送请求并查看返回结果。
