保康网站建设网站备案去哪找接入商
主要功能
学生登录:
①首页、个人中心:修改密码、个人信息管理等
②公告信息管理、课程信息管理、学生选课管理、作业布置管理、作业提交管理、作业评分管理、课程评价管理、课程资源管理
教师登录:
①首页、个人中心:修改密码、个人信息管理等
②课程信息管理、学生选课管理、作业布置管理、作业提交管理、作业评分管理、课程评价管理、课程资源管理
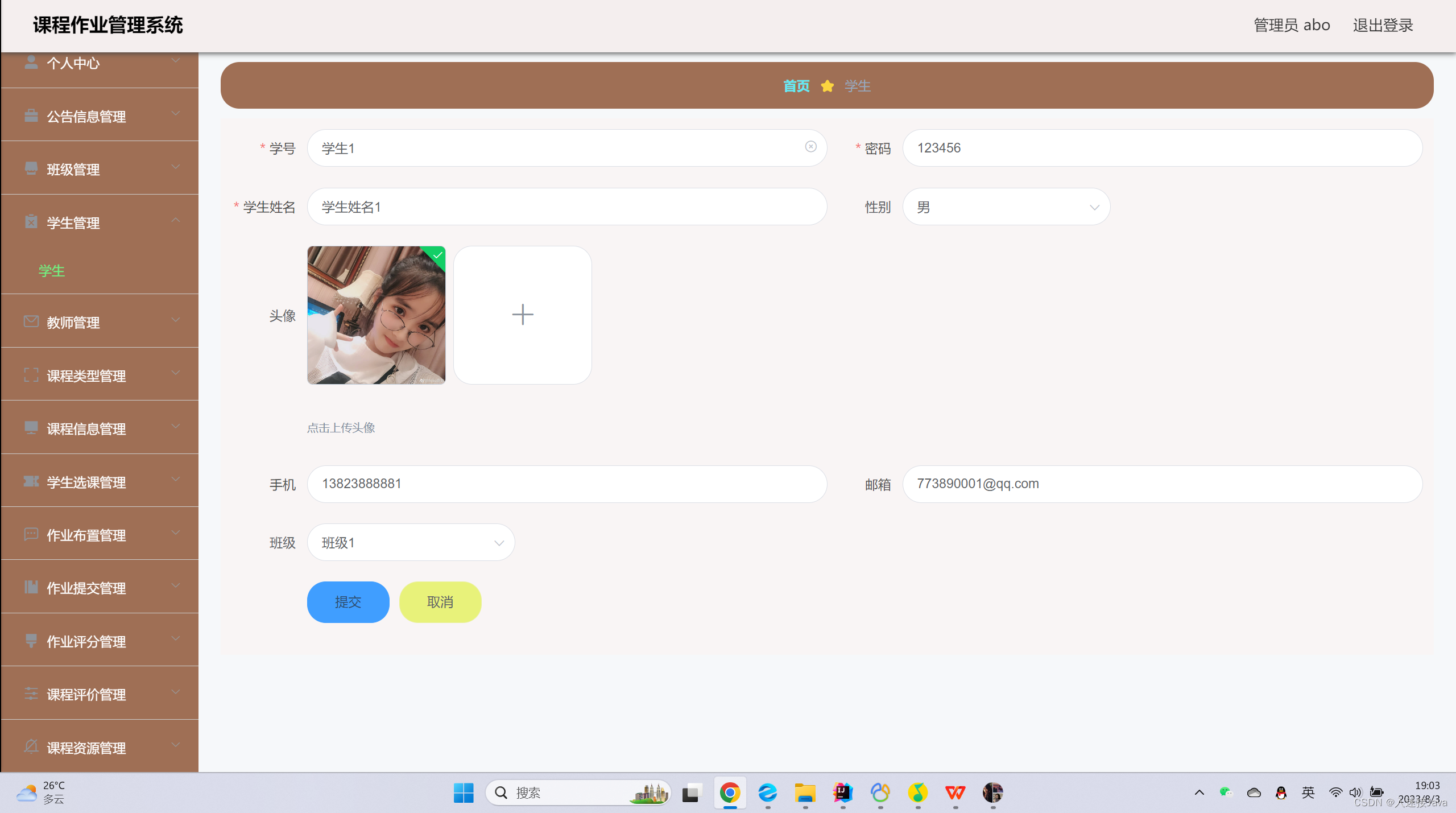
管理员登录:
①首页、个人中心:修改密码、个人信息管理等
②公告信息管理、班级管理、学生管理、教师管理、课程类型管理、课程信息管理、学生选课管理、作业布置管理、作业提交管理、作业评分管理、课程评价管理、课程资源管理
需要安装的软件
开发工具: idea
数据库:Mysql 5或8
服务器:Tomcat(版本随意)
后端框架:springboot
前端框架:vue
部署教程
1. 创建数据库springbootwwiwn,再运行数据库文件夹里的sql脚本,创建相应表
2. 修改application.yml中与Mysql数据库相关的信息
3. 配置maven依赖,jdk版本
4. 启动项目,后台登录页面http://localhost:8080/springbootwwiwn/admin/dist/index.html
管理员 账户:abo 密码:abo
用户 账户:学生1 密码:123456
交流学习
| v:rumi19891212 | |
| q:1394842882 |
演示
项目功能演示:
————————————————