网站制作哪家专业贵州小程序制作开发
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
作者简介:Java领域优质创作者、CSDN博客专家 、CSDN内容合伙人、掘金特邀作者、阿里云博客专家、51CTO特邀作者、多年架构师设计经验、多年校企合作经验,被多个学校常年聘为校外企业导师,指导学生毕业设计并参与学生毕业答辩指导,有较为丰富的相关经验。期待与各位高校教师、企业讲师以及同行交流合作
主要内容:Java项目、Python项目、前端项目、PHP、ASP.NET、人工智能与大数据、单片机开发、物联网设计与开发设计、简历模板、学习资料、面试题库、技术互助、就业指导等
业务范围:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码编写、论文编写和辅导、论文降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路等。
收藏点赞不迷路 关注作者有好处
文末获取源码
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
开题报告
题目:Hadoop+Spark+Hive物流预测系统 物流大数据分析平台
一、研究背景与意义
随着信息技术的飞速发展和电子商务的普及,物流行业产生了海量的数据,这些数据涵盖了订单信息、运输路线、仓储状态等丰富的信息。然而,传统的数据处理和分析方法在处理如此庞大的数据量时显得力不从心,无法满足物流行业对实时性和准确性的需求。因此,开发一个高效的物流数据预测与分析平台显得尤为重要。Hadoop作为一种分布式计算框架,以其强大的数据处理能力成为处理大数据的理想选择。结合Spark的快速处理能力和Hive的数据仓库功能,可以进一步提升物流数据分析的效率和准确性。
二、研究目的
本研究旨在设计并实现一个基于Hadoop、Spark和Hive的物流预测与大数据分析平台,通过对物流数据的深度挖掘和分析,为物流行业提供更高效、更精准的决策支持。该平台将提高数据处理和分析的效率,同时通过直观的可视化界面帮助用户快速理解数据,从而优化物流管理和决策过程。
三、研究内容
-
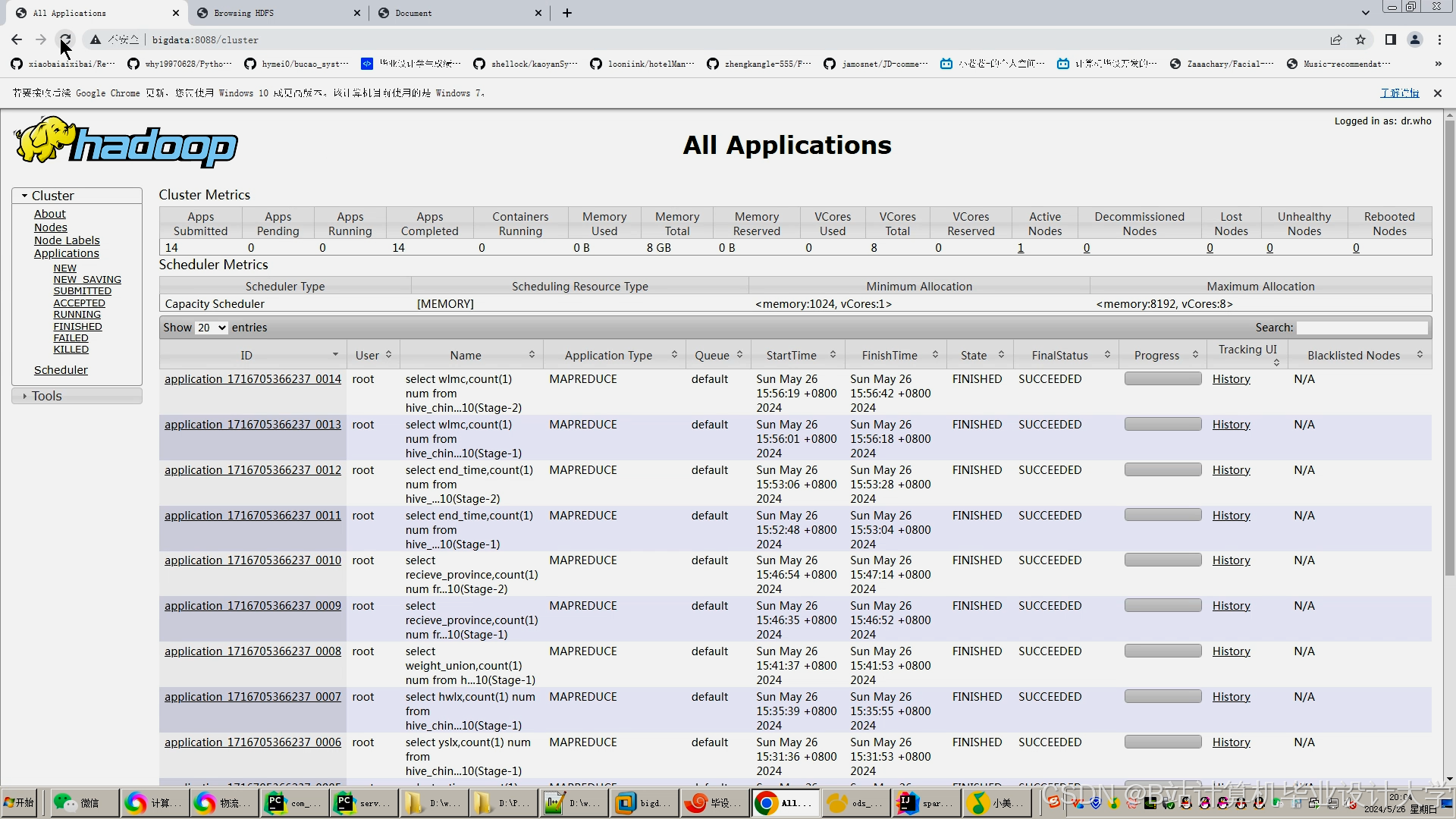
Hadoop集群的搭建与配置
- 包括Hadoop的安装、配置以及集群的部署,确保系统能够高效运行。
-
物流数据收集与预处理
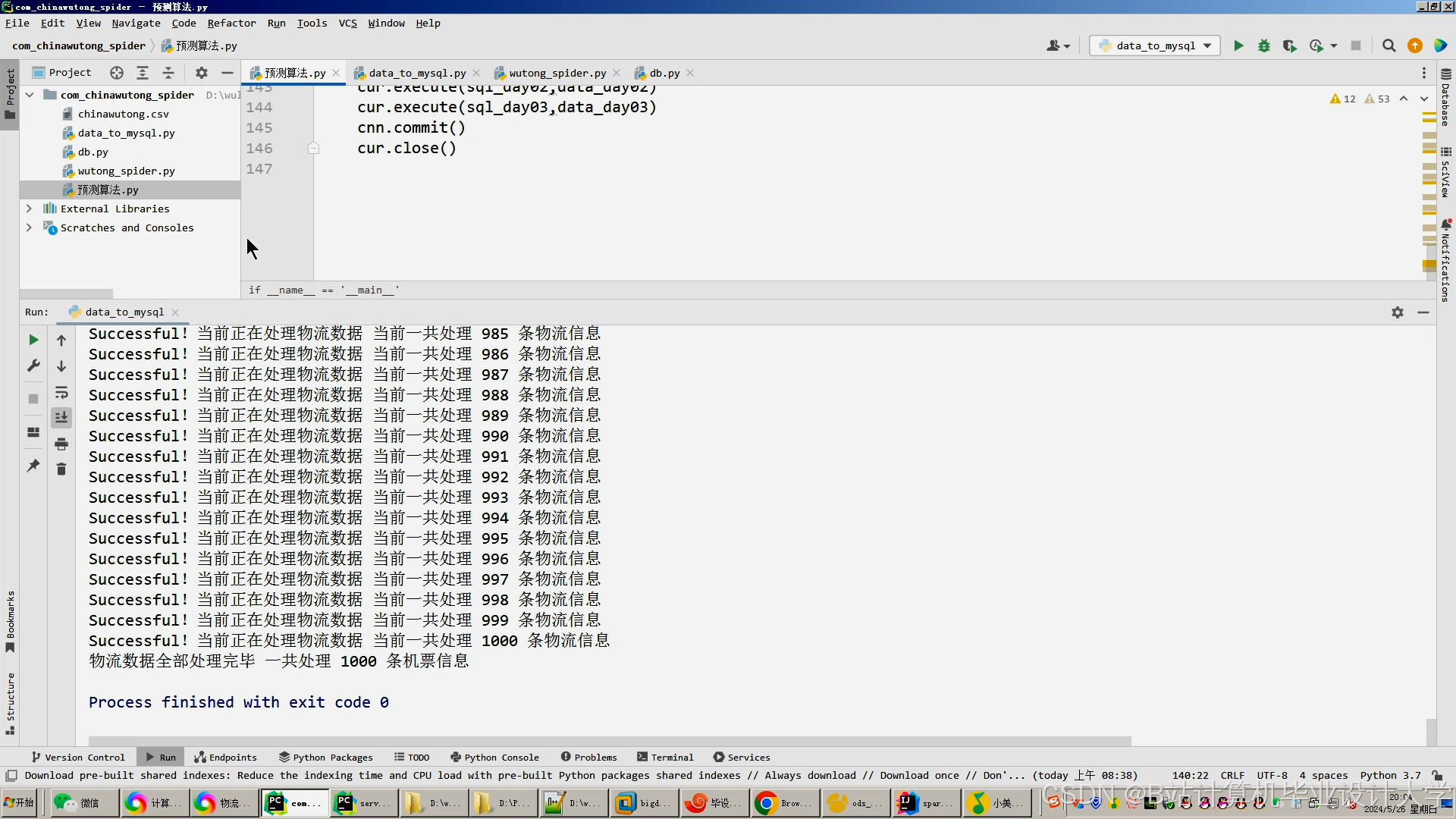
- 使用Python爬虫等技术采集物流数据,并使用pandas等工具进行数据清洗和预处理。
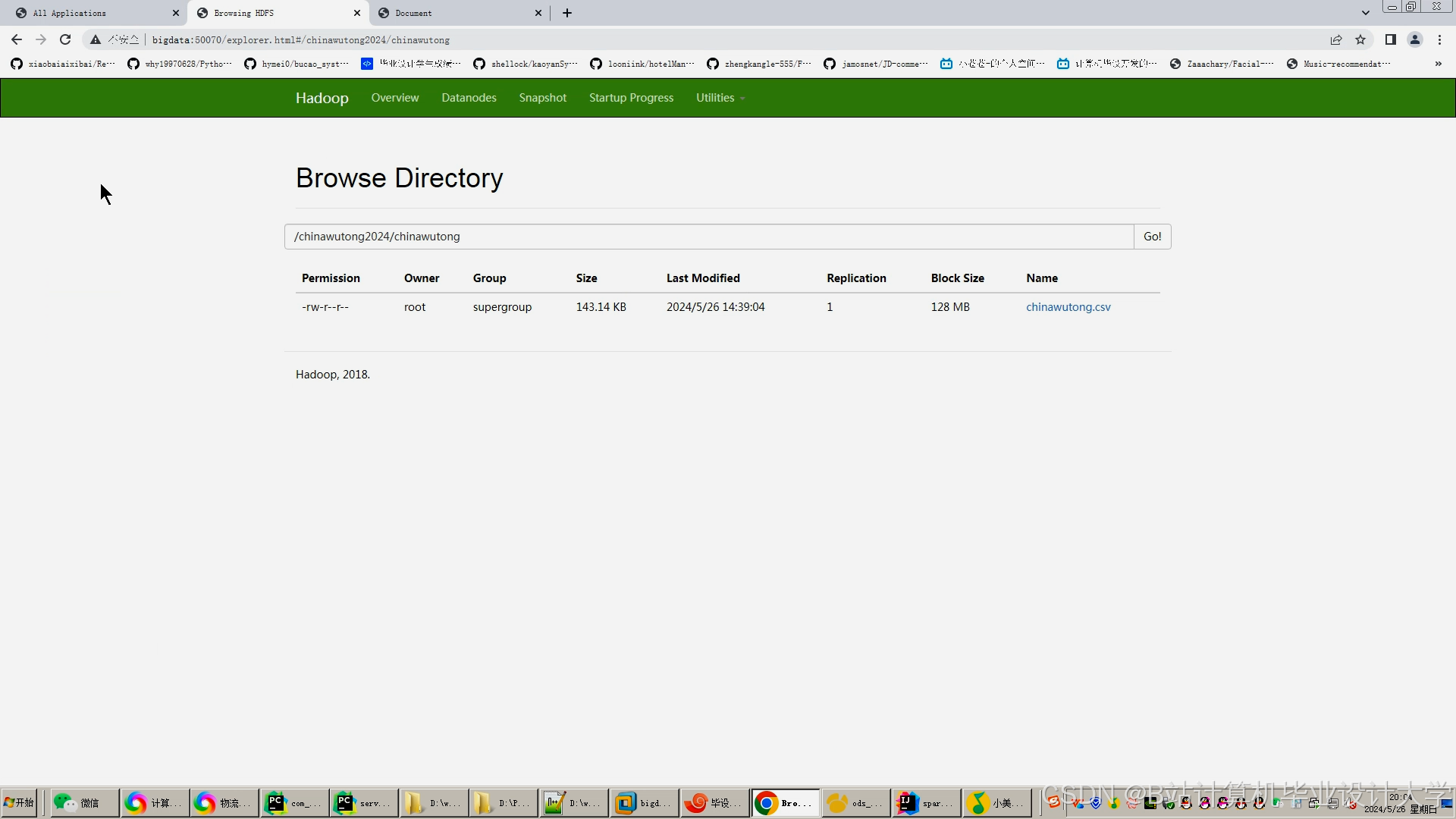
- 将处理后的数据上传到HDFS文件系统,并使用Hive进行数据仓库的建设和管理。
-
数据分析模型设计
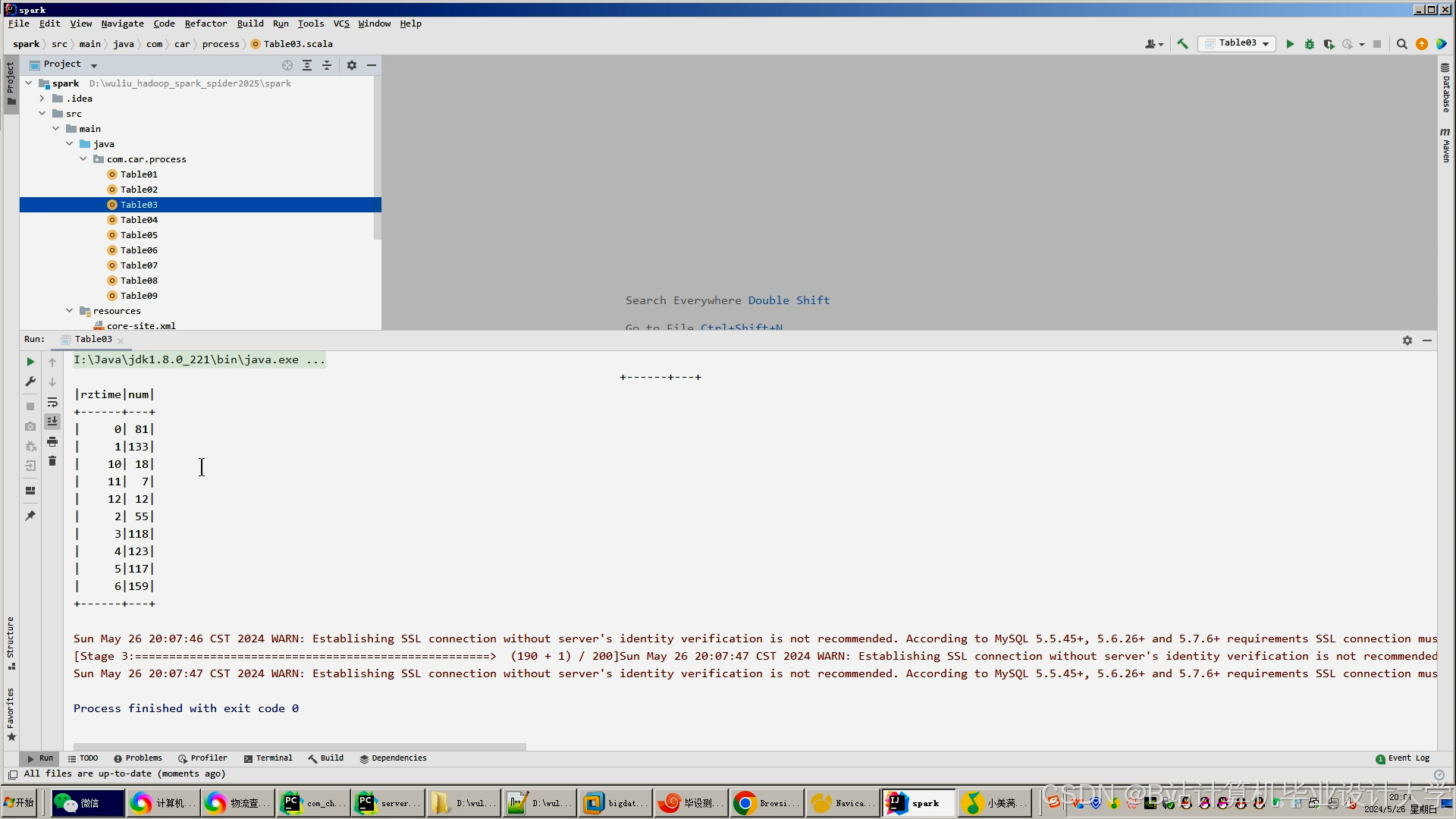
- 基于Hadoop和Spark等大数据技术,设计并实现适合物流数据分析的模型。
- 包括数据挖掘、关联分析、聚类分析以及时间序列预测等。
-
数据可视化界面设计
- 采用Vue、Echarts等前端技术,设计并实现一个直观、易用的数据可视化界面。
- 方便用户查看和分析物流数据,提高用户对分析结果的理解和应用能力。
-
系统测试与优化
- 通过实际物流数据对系统进行测试和验证,评估系统的性能和效果。
- 根据测试结果进行必要的优化,提高数据处理能力和预测准确性。
四、研究方法
-
文献研究法
- 通过查阅相关文献,了解Hadoop、Spark、Hive以及数据可视化等领域的最新研究成果和技术进展。
-
系统开发法
- 采用软件工程的方法,按照需求分析、系统设计、系统实现、系统测试等阶段进行系统的开发。
-
实证研究法
- 通过实际物流数据对系统进行测试和验证,评估系统的性能和效果。
五、预期成果
-
技术成果
- 完成Hadoop+Spark+Hive物流预测与大数据分析平台的设计与实现。
- 包括Hadoop集群的搭建、物流数据收集与预处理模块、数据分析模型和数据可视化界面的设计与实现。
-
理论成果
- 撰写一篇关于Hadoop+Spark+Hive物流预测与大数据分析平台的学术论文。
- 总结研究成果和技术创新点。
-
应用成果
- 将系统应用于实际物流场景,提高物流企业的数据处理能力、预测准确性和决策支持能力。
六、研究计划
-
第一阶段(1-2个月)
- 完成Hadoop集群的搭建与配置,确保系统能够正常运行。
-
第二阶段(3-4个月)
- 设计并实现物流数据收集与预处理模块,收集并处理物流数据。
-
第三阶段(5-6个月)
- 设计并实现数据分析模型,进行数据挖掘、关联分析、聚类分析以及时间序列预测等工作。
-
第四阶段(7-8个月)
- 设计并实现数据可视化界面,完成系统的集成和测试。
-
第五阶段(9-10个月)
- 撰写论文,准备答辩。
七、结论
本研究通过充分利用Hadoop的分布式计算能力、Spark的快速处理能力和Hive的数据仓库功能,结合时间序列预测模型和直观的数据可视化界面,旨在提升物流数据处理的效率和准确性,为物流企业的运营决策提供有力支持。预期研究成果将为物流行业的大数据应用提供新的思路和方法,具有重要的理论和实践意义。
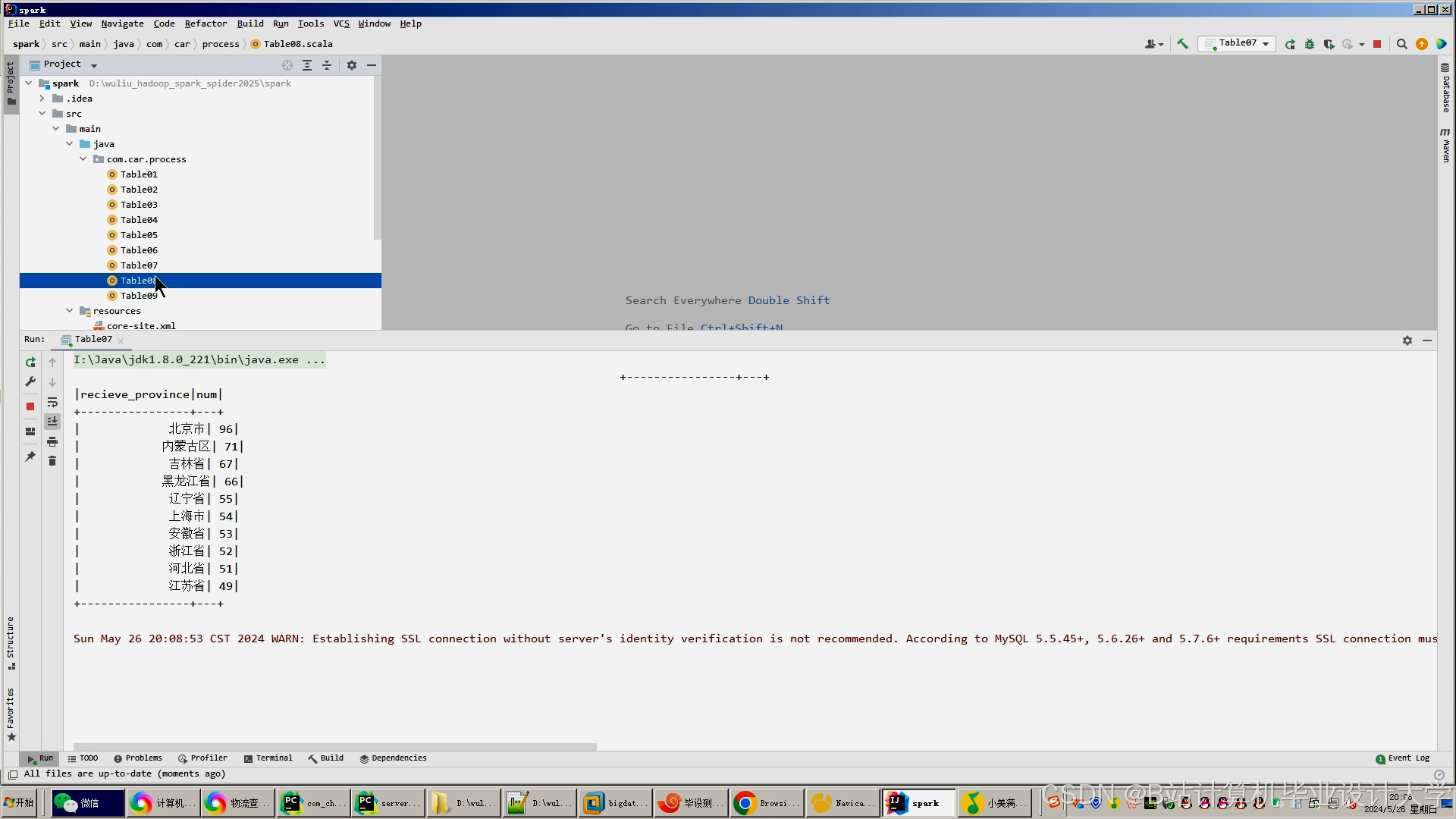
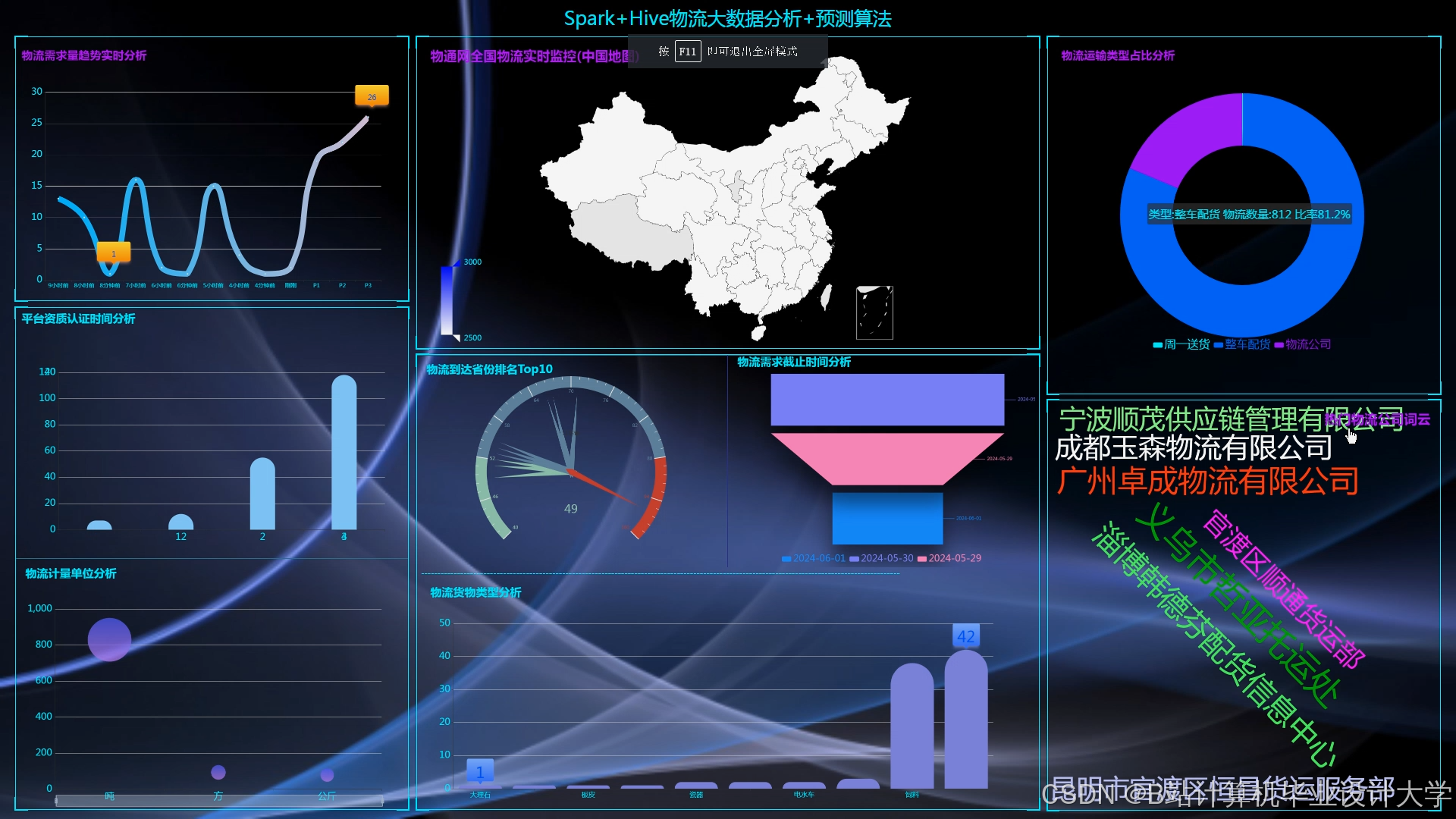
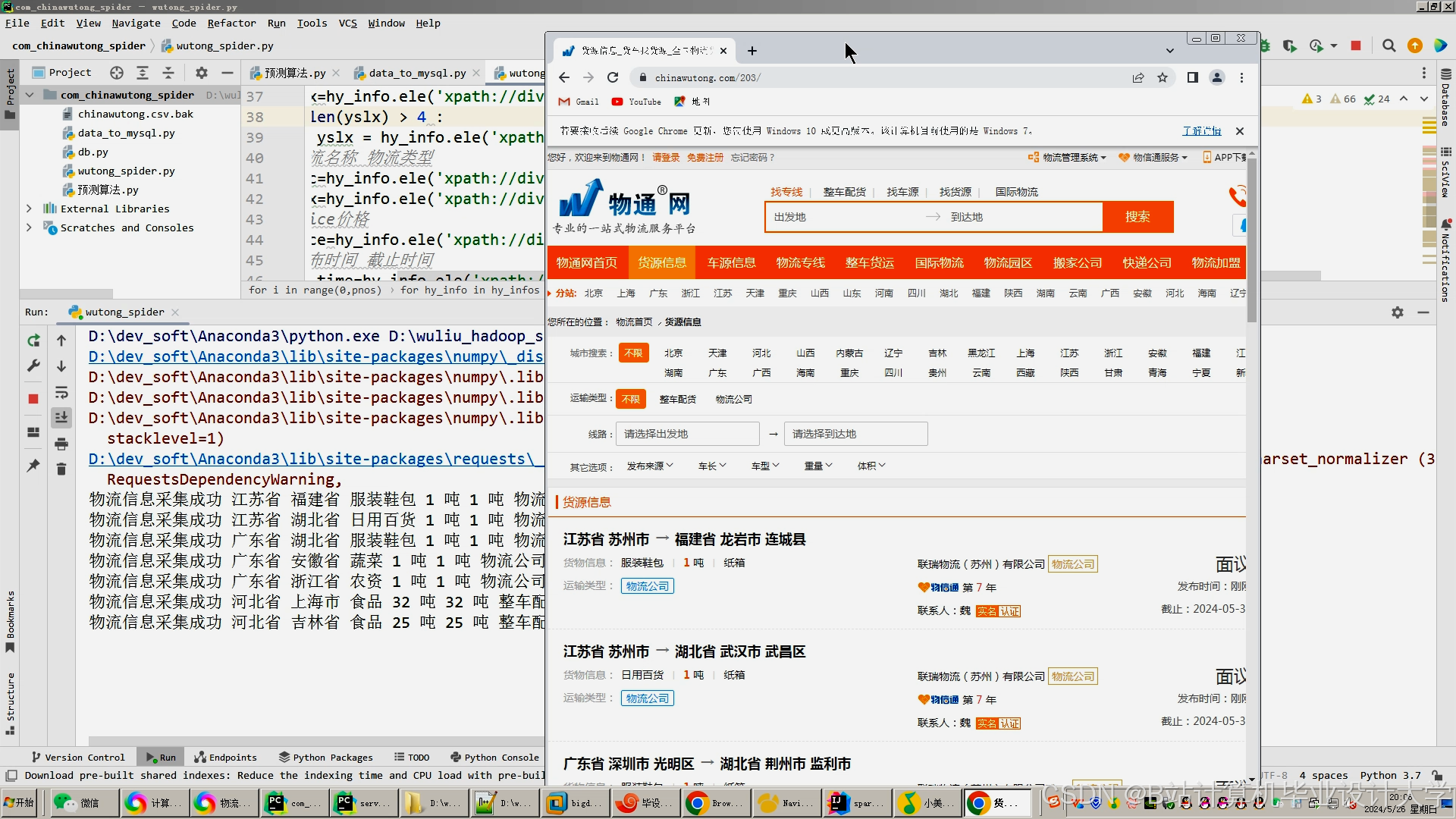
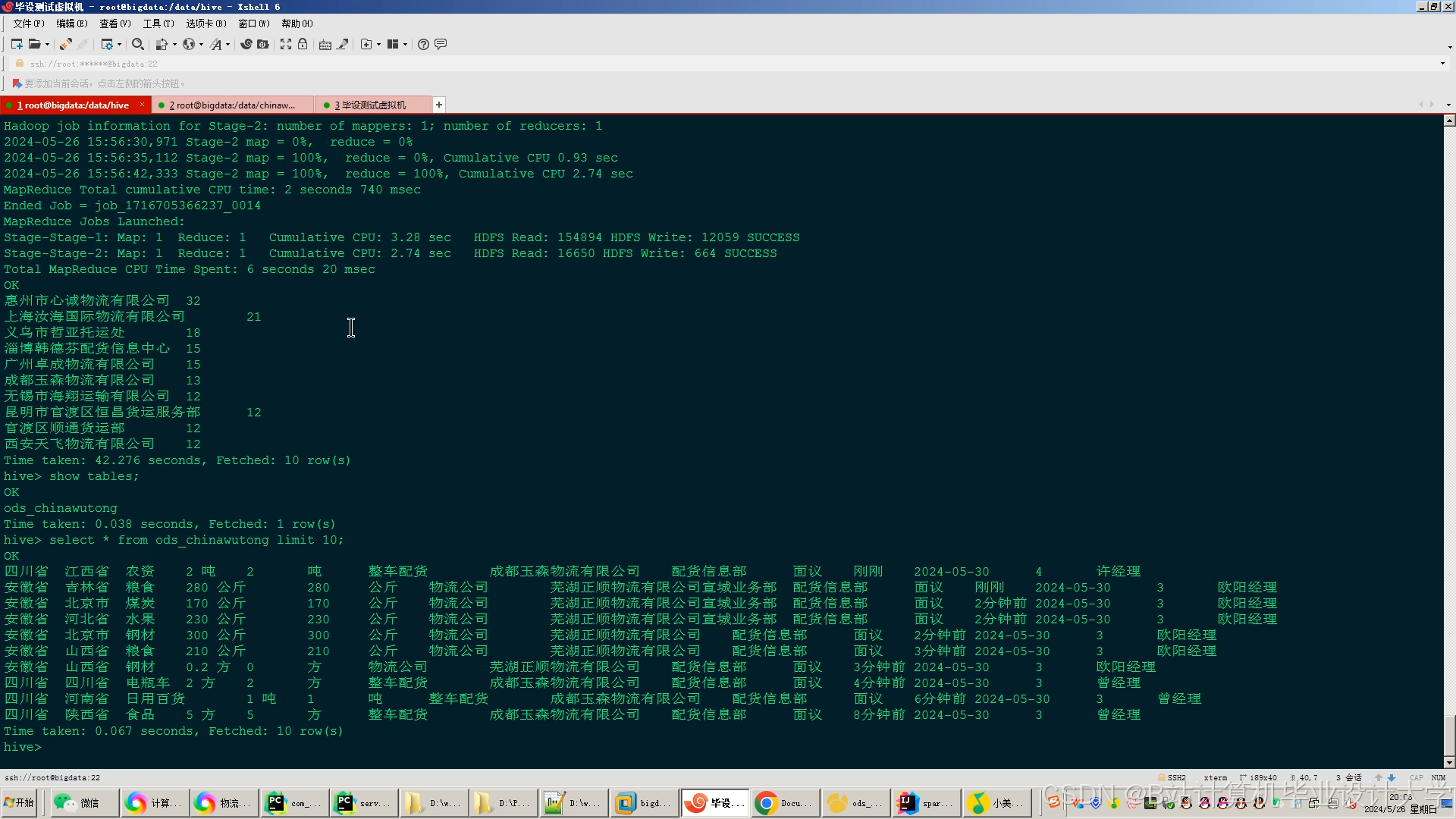
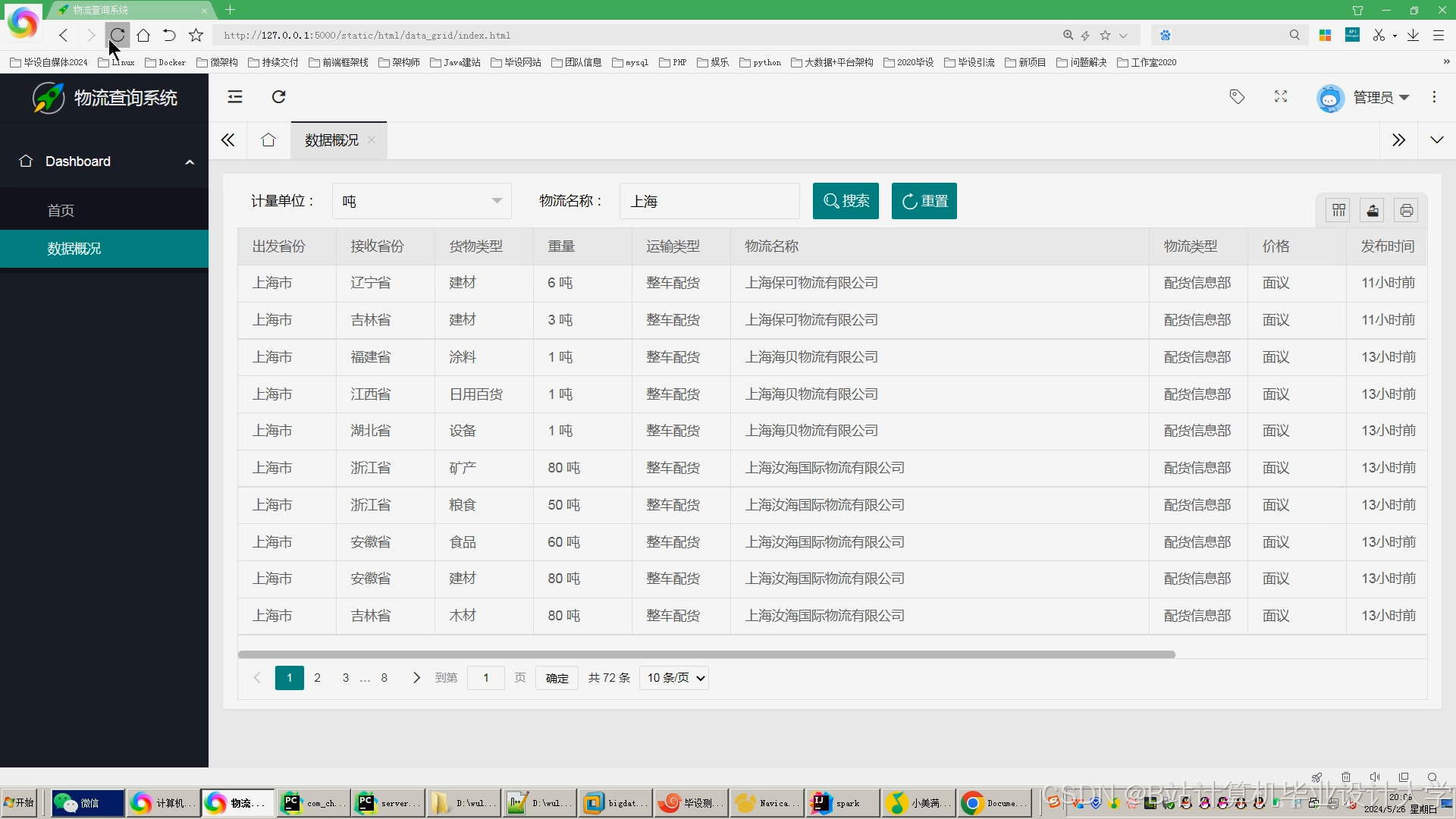
运行截图
推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻