扩展名网站网站备案密码丢了怎么办
一、简介
Jenkins如果没有设置保留构建历史数,磁盘会随着使用次数增加而越来越满,于是需要批量清理一下。
二、清理脚本

找到Script Console

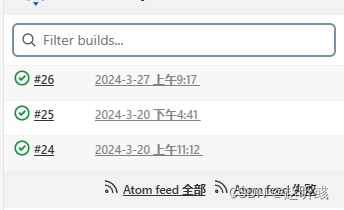
输入脚本,并点击执行,需要注意期望删除的构建历史编号(可以查看下面的效果图)
def jobNames = ["job1", "job2", "job3"] // 需要删除的项目名称列表
def maxNumber = 23 // 少于该编号的会被删除jobNames.each { jobName ->Jenkins.instance.getItemByFullName(jobName)?.builds.findAll {it.number <= maxNumber}?.each {it.delete()}
}
执行前

执行后