邢台路桥建设总公司没有网站吗阳江兼职招聘网
在互联网电商模式逐渐成熟的当下,盲盒电商为消费者提供了一个全新的娱乐购物体验,让众多粉丝和消费者通过手机系统就可以体验拆盲盒的惊喜感和刺激性。在消费者享受线上拆盲盒的乐趣时,企业也能够获得新的发展机遇,扩大发展空间。
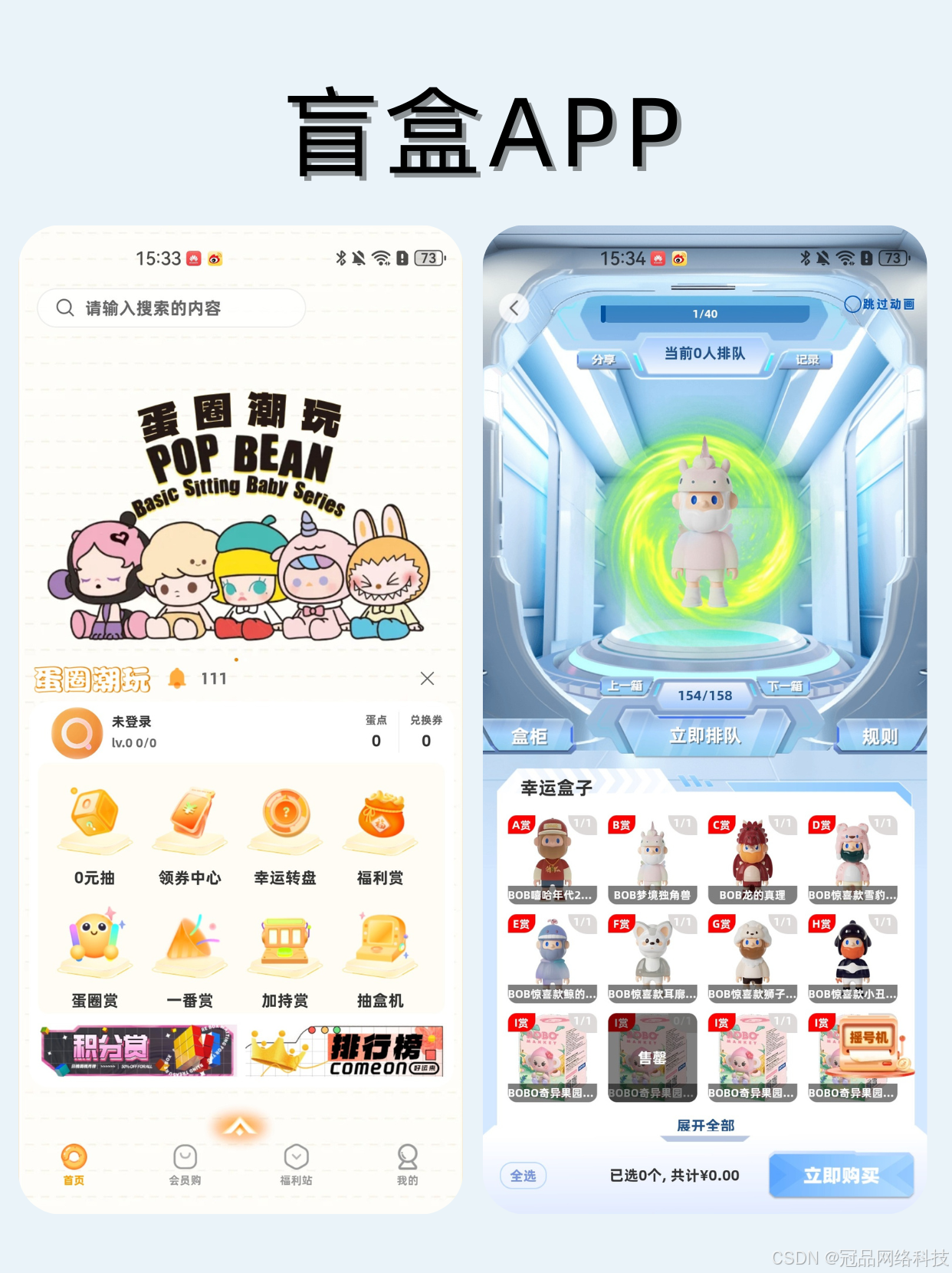
盲盒系统是一种在线购物模式,消费者通过APP平台浏览查看盲盒商品,系统后台设置各种盲盒种类,详细介绍商品信息,让用户更加便捷的购买。盲盒作为社交新潮流,在平台上用户之间还可以进行社交互动,讨论最新盲盒商品等,让用户在拆盲盒中体验消费乐趣,吸引广大用户参与。
线上盲盒系统的特点
1、商品种类丰富
系统上的商品不受空间限制,后台可以上架丰富的商品种类,涵盖了动漫、影视、游戏等各个领域的IP,满足不同玩家对盲盒商品的需求,提高平台对消费者的吸引力。
2、价格公开透明
线上盲盒系统的价格公开透明,用户可以直直接浏览各个商品的信息,了解价格,消费者根据预算随意消费,每个商品的性价比超高,能够给消费者带来更多惊喜感。
3、玩法多样
盲盒系统提供了多样的玩法,传统与创新相结合,一番赏、无限赏、福袋、欧霸赏、PK赏等,用户可以任意选择,体验不同玩法带来的魅力。
4、社交互动性强
线上盲盒注重社交互动,消费者在拆盲盒后可以分享到各大社交平台上,与其他盲盒爱好者交流讨论,满足社交需求,还提高了平台的知名度,吸引更多的消费者到平台共同拆盲盒。
5、积分兑换奖励
系统上还提供积分奖励机制,用户在购买盲盒、签到、邀请好友后可以获得积分奖励,这些积分可用于盲盒抽奖和购买抵扣,商品包括隐藏款和限量款商品,可以提高用户购物欲望,增加平台的销量。
盲盒电商系统在市场发展中是一个全新的机遇,企业商家要及时抓住发展机遇,借助互联网的发展获得市场收益,更进一步发展。