做ppt的网站叫什么软件wordpress上传mp4
一、介绍
1、介绍
二、原理
三、集成与使用
1、集成方法
(1)开启
使用以下注解开启
@EnableAsync(2)使用
在需要异步处理的方法上加上
@Async2、返回值
@Async注解的方法返回值只能为void或者Future<T>。
(1)无返回值
(2)有返回值
使用AsyncResult包装下得到Future对象返回;调用处使用get方法获取。
3、demo
(1)初始化线程池
如我初始化了两个,分别在user模块、order模块使用
package com.demo.thread.constant;public class ThreadPoolConstant {public static final String USER_POOL = "userPool";public static final String ORDER_POOL = "orderPool";
}
package com.demo.thread.config;import com.demo.thread.constant.ThreadPoolConstant;
import org.springframework.context.annotation.Bean;
import org.springframework.context.annotation.Configuration;
import org.springframework.scheduling.annotation.EnableAsync;
import org.springframework.scheduling.concurrent.ThreadPoolTaskExecutor;@Configuration
@EnableAsync
public class ThreadPoolTaskExecutorConfig {private static int CORE_POOL_SIZE = 5;private static int MAX_POOL_SIZE = 10;@Bean(name= ThreadPoolConstant.USER_POOL)public ThreadPoolTaskExecutor userTaskExecutor(){ThreadPoolTaskExecutor poolTaskExecutor = new ThreadPoolTaskExecutor();//线程池维护线程的最少数量poolTaskExecutor.setCorePoolSize(CORE_POOL_SIZE);//线程池维护线程的最大数量poolTaskExecutor.setMaxPoolSize(MAX_POOL_SIZE);//线程池所使用的缓冲队列poolTaskExecutor.setQueueCapacity(200);//线程池维护线程所允许的空闲时间poolTaskExecutor.setKeepAliveSeconds(30000);poolTaskExecutor.setWaitForTasksToCompleteOnShutdown(true);poolTaskExecutor.setBeanName(ThreadPoolConstant.USER_POOL);return poolTaskExecutor;}@Bean(name= ThreadPoolConstant.ORDER_POOL)public ThreadPoolTaskExecutor orderTaskExecutor(){ThreadPoolTaskExecutor poolTaskExecutor = new ThreadPoolTaskExecutor();//线程池维护线程的最少数量poolTaskExecutor.setCorePoolSize(CORE_POOL_SIZE);//线程池维护线程的最大数量poolTaskExecutor.setMaxPoolSize(MAX_POOL_SIZE);//线程池所使用的缓冲队列poolTaskExecutor.setQueueCapacity(200);//线程池维护线程所允许的空闲时间poolTaskExecutor.setKeepAliveSeconds(30000);poolTaskExecutor.setWaitForTasksToCompleteOnShutdown(true);poolTaskExecutor.setBeanName(ThreadPoolConstant.ORDER_POOL);return poolTaskExecutor;}
}
(2)service
package com.demo.thread.service.impl;import com.demo.thread.constant.ThreadPoolConstant;
import com.demo.thread.service.UserService;
import lombok.extern.slf4j.Slf4j;
import org.springframework.scheduling.annotation.Async;
import org.springframework.scheduling.annotation.AsyncResult;
import org.springframework.stereotype.Service;import java.util.ArrayList;
import java.util.List;
import java.util.concurrent.Future;@Service("userService")
@Slf4j
public class UserServiceImpl implements UserService {@Override@Async(ThreadPoolConstant.USER_POOL)public void create() {log.info("user create开始...");try {Thread.sleep(3000);} catch (InterruptedException e) {throw new RuntimeException(e);}log.info("user create结束...");}@Override@Async(ThreadPoolConstant.USER_POOL)public Future<List<String>> query() {log.info("user query 开始...");try {Thread.sleep(3000);} catch (InterruptedException e) {throw new RuntimeException(e);}List<String> userIds = new ArrayList<>();userIds.add("zs");userIds.add("ls");Future<List<String>> users = new AsyncResult(userIds);log.info("user query 结束...");return users;}
}
(3)controller
package com.demo.thread.controller;import com.demo.thread.service.UserService;
import lombok.extern.slf4j.Slf4j;
import org.springframework.beans.factory.annotation.Autowired;
import org.springframework.web.bind.annotation.RequestMapping;
import org.springframework.web.bind.annotation.RestController;import java.util.List;
import java.util.concurrent.ExecutionException;
import java.util.concurrent.Future;@RestController
@RequestMapping("/test")
@Slf4j
public class UserController {@Autowiredprivate UserService userService;@RequestMapping("/create")public void create() {log.info("测试create开始");userService.create();log.info("测试create结束");}@RequestMapping("/query")public void query() {log.info("测试query开始");Future<List<String>> users = userService.query();log.info("调用query结束");try {List<String> userIds = users.get();log.info("query结果为:{}",userIds);} catch (InterruptedException e) {throw new RuntimeException(e);} catch (ExecutionException e) {throw new RuntimeException(e);}log.info("测试query结束");}
}
(4)启动类
package com.demo.thread;import org.springframework.boot.SpringApplication;
import org.springframework.boot.autoconfigure.SpringBootApplication;@SpringBootApplication
public class ThreadApplicationStart {public static void main(String[] args) {SpringApplication.run(ThreadApplicationStart.class, args);}
}
(5)测试
无返回值:访问localhost:8080/test/create控制台输出:

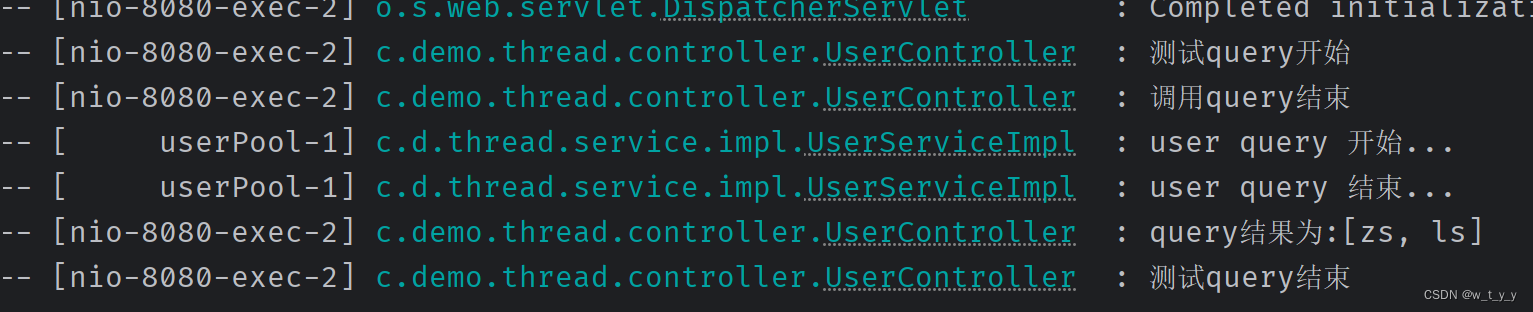
有返回值:访问localhost:8080/test/query控制台输出:可以看到feture取结果会阻塞主线程,其他则按执行顺序打印