建设网站注意wordpress 自定义链接
1、jadx
下载地址如下,目前最新版本为v1.4.7,改成想要下载的版本号就能下载对应的版本。
https://github.com/skylot/jadx/releases/tag/v1.4.7
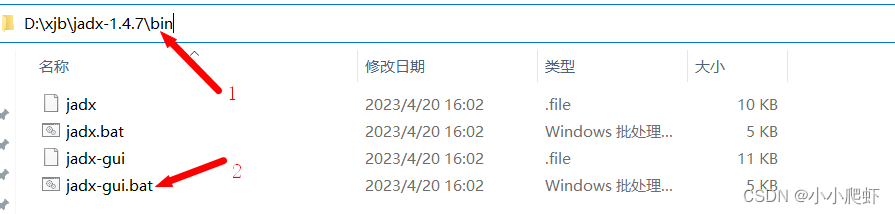
下载后解压,进入对应路径的bin文件夹内,运行jadx-gui.bat。
2、gda
下载地址和github地址如下,当前最新版本为4.10
http://www.gda.wiki:9090/
https://github.com/charles2gan/GDA-android-reversing-Tool
3、jeb
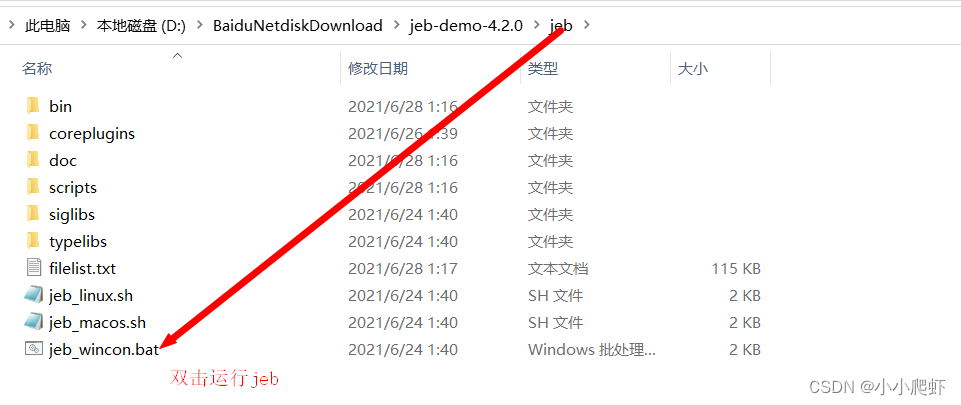
已经将jeb文件上传到阿里云盘。下载并且解压。

第一次使用需要注册,方法参考链接:
https://www.52pojie.cn/thread-1598242-1-1.html 首先解压jeb.zip
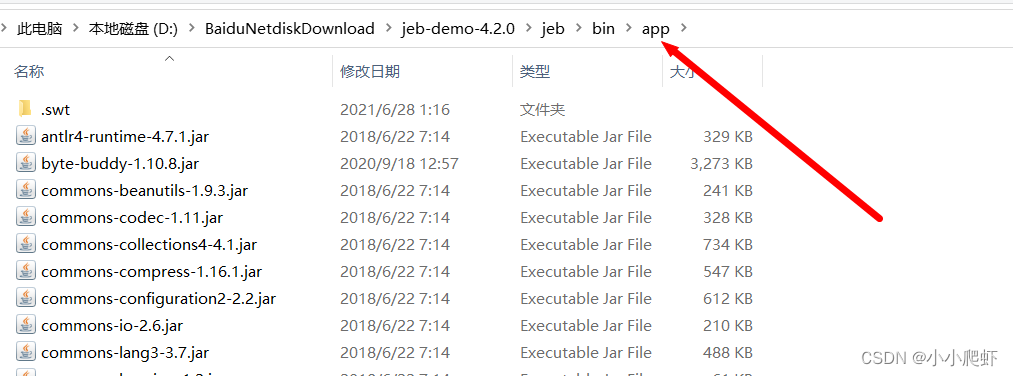
然后将fix文件夹里的jeb.jar复制并替换到jeb\bin\app文件夹下

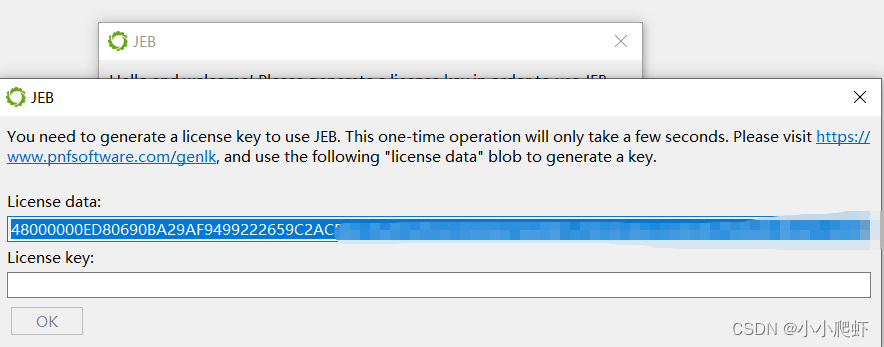
复制这个字符串,放入在线运行网址代码在线运行 - 在线工具(python3),将上述字符串放入licdata = ""的引号中,用python3运行下面代码,获得一串数字,即是需要的码。
