装修公司网站建设的意义网站备案主体修改
版本说明
当前版本号[20230808]。
| 版本 | 修改说明 |
|---|---|
| 20230808 | 初版 |
目录
文章目录
- 版本说明
- 目录
- 209.长度最小的子数组
- 思路
- 暴力解法
- 滑动窗口
- 两种方法的区别
- 总结
209.长度最小的子数组
力扣题目链接
更多内容可点击此处跳转到代码随想录,看原版文件
给定一个含有 n 个正整数的数组和一个正整数 s ,找出该数组中满足其和 ≥ s 的长度最小的 连续 子数组,并返回其长度。如果不存在符合条件的子数组,返回 0。
示例:
- 输入:s = 7, nums = [2,3,1,2,4,3]
- 输出:2
- 解释:子数组 [4,3] 是该条件下的长度最小的子数组。
提示:
- 1 <= target <= 10^9
- 1 <= nums.length <= 10^5
- 1 <= nums[i] <= 10^5
思路
暴力解法
这道题目暴力解法当然是 两个for循环,然后不断的寻找符合条件的子序列,时间复杂度很明显是O(n^2)。
代码如下:
class Solution {/*** 使用滑动窗口方法来找到最小长度的子数组*s 目标值* nums正整数数组* 最小长度的子数组的长度*/public int minSubArrayLen(int s, int[] nums) {int result = Integer.MAX_VALUE; // 最终的结果,默认为最大值int sum = 0; // 子序列的数值之和int subLength = 0; // 子序列的长度for (int i = 0; i < nums.length; i++) { // 设置子序列起点为isum = 0;for (int j = i; j < nums.length; j++) { // 设置子序列终止位置为jsum += nums[j];if (sum >= s) { // 一旦发现子序列和超过了s,更新resultsubLength = j - i + 1; // 取子序列的长度result = Math.min(result, subLength); // 更新result为较小值break; // 因为我们是找符合条件最短的子序列,所以一旦符合条件就break}}}// 如果result没有被赋值的话,就返回0,说明没有符合条件的子序列return result == Integer.MAX_VALUE ? 0 : result;}
}
- 时间复杂度:O(n^2)
- 空间复杂度:O(1)
后面力扣更新了数据,暴力解法已经超时了。
滑动窗口
接下来就开始介绍数组操作中另一个重要的方法:滑动窗口。
所谓滑动窗口,就是不断的调节子序列的起始位置和终止位置,从而得出我们要想的结果。
在暴力解法中,是一个for循环滑动窗口的起始位置,一个for循环为滑动窗口的终止位置,用两个for循环 完成了一个不断搜索区间的过程。
那么滑动窗口如何用一个for循环来完成这个操作呢?
首先要思考 如果用一个for循环,那么应该表示 滑动窗口的起始位置,还是终止位置。
如果只用一个for循环来表示 滑动窗口的起始位置,那么如何遍历剩下的终止位置?
此时难免再次陷入 暴力解法的怪圈。
所以 只用一个for循环,那么这个循环的索引,一定是表示 滑动窗口的终止位置。
那么问题来了, 滑动窗口的起始位置如何移动呢?
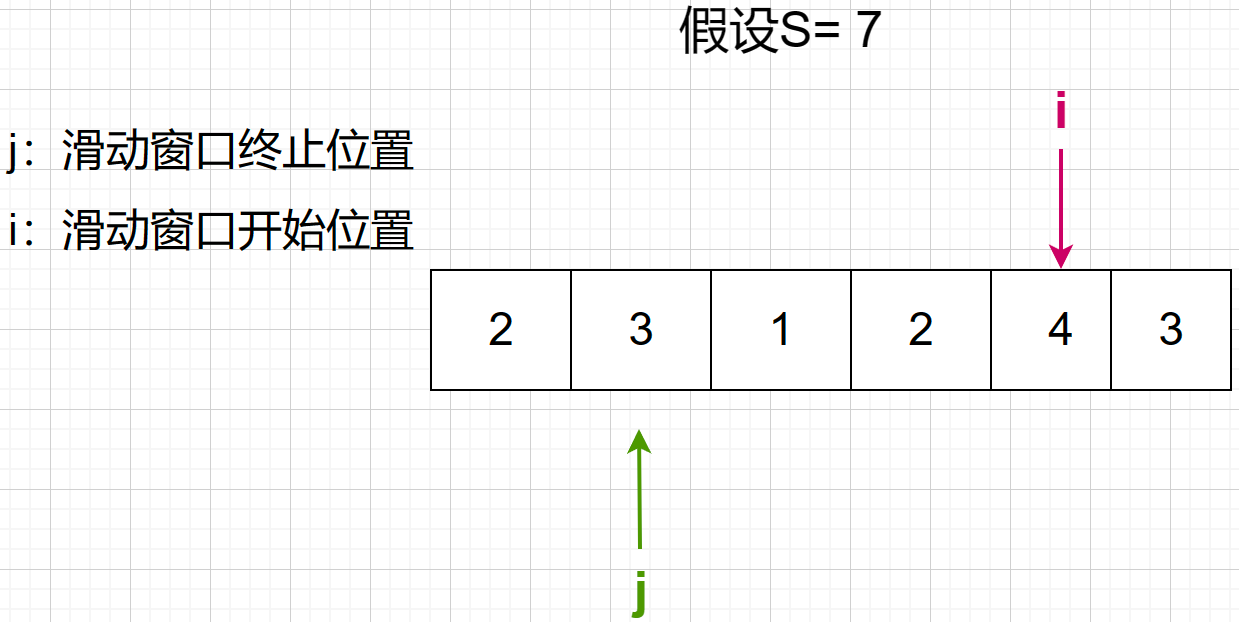
这里还是以题目中的示例来举例,s=7, 数组是 2,3,1,2,4,3,来看一下查找的过程:
第一步:设i,j为滑动窗口开始、终止位置

第二步:i开始向右走,直到走到累加的和大于等于7停下来
2 + 3 = 5 < 7
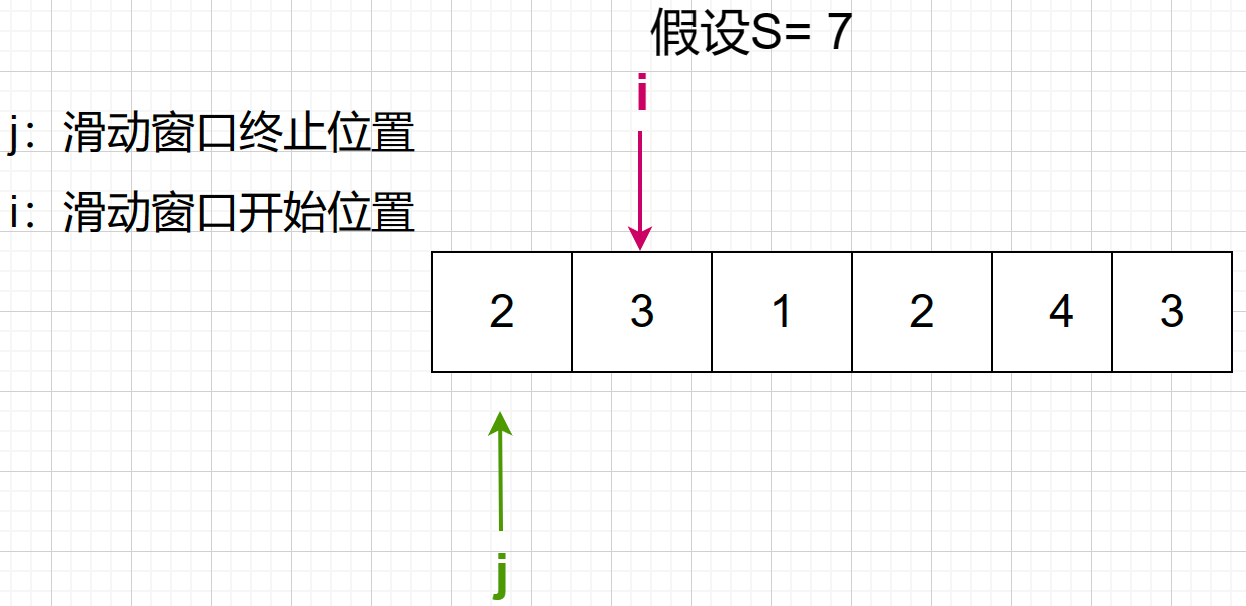
2 + 3 + 1 = 6 < 7
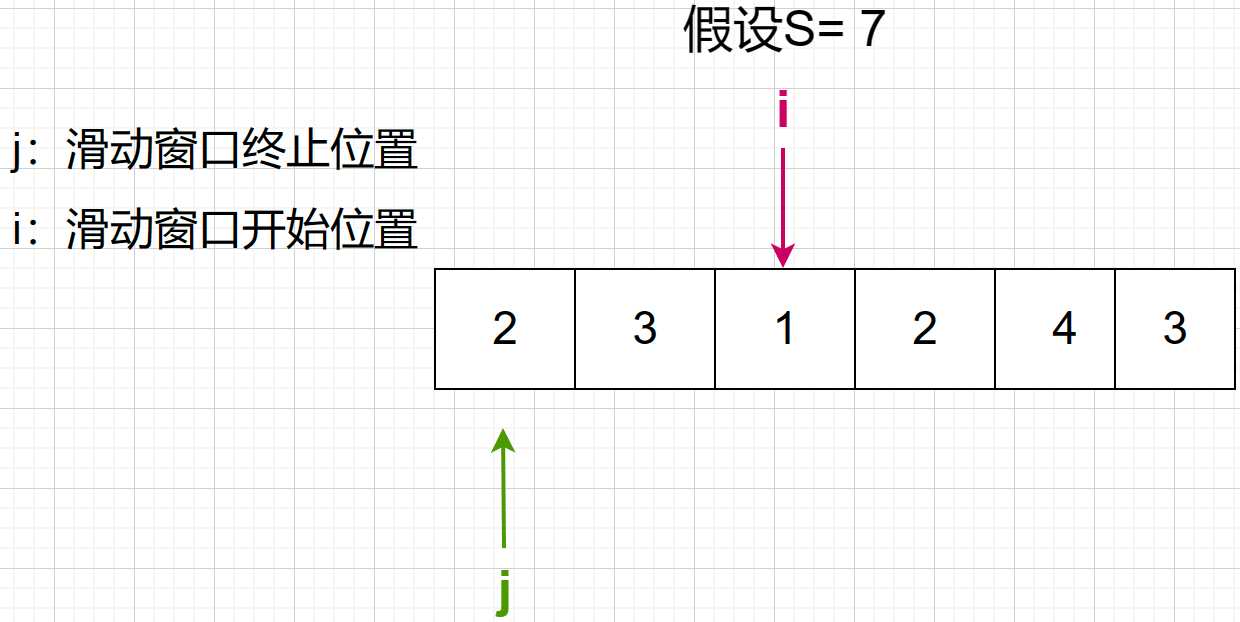
2 + 3 + 1 + 2 = 8 > 7 ,长度为4
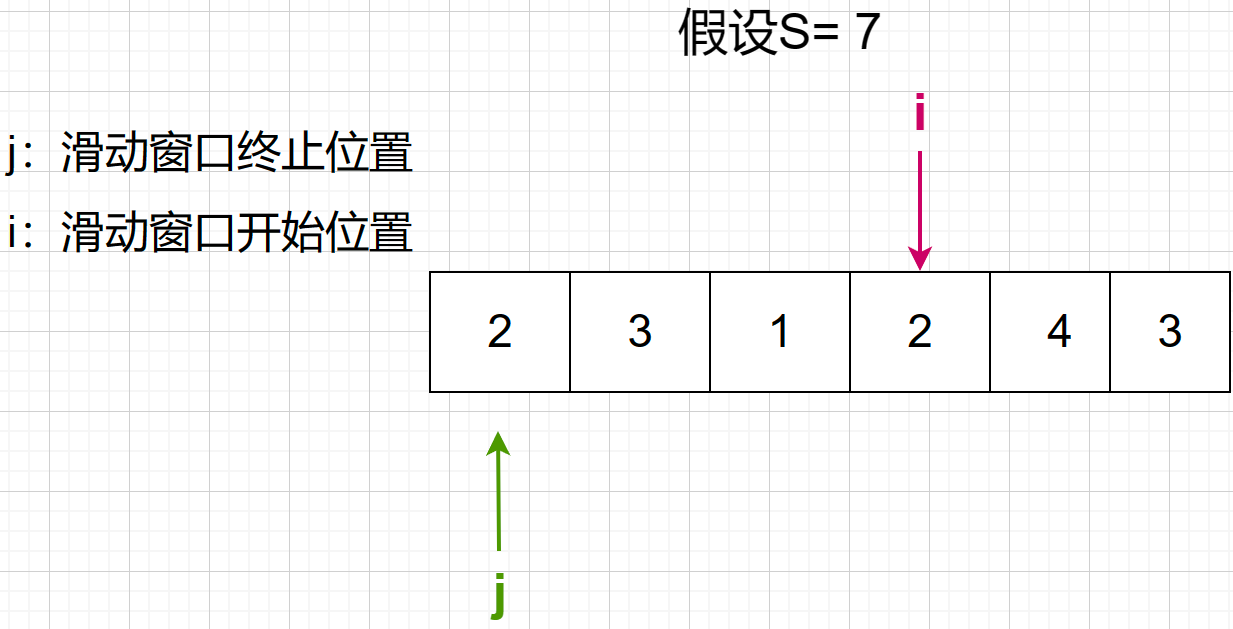
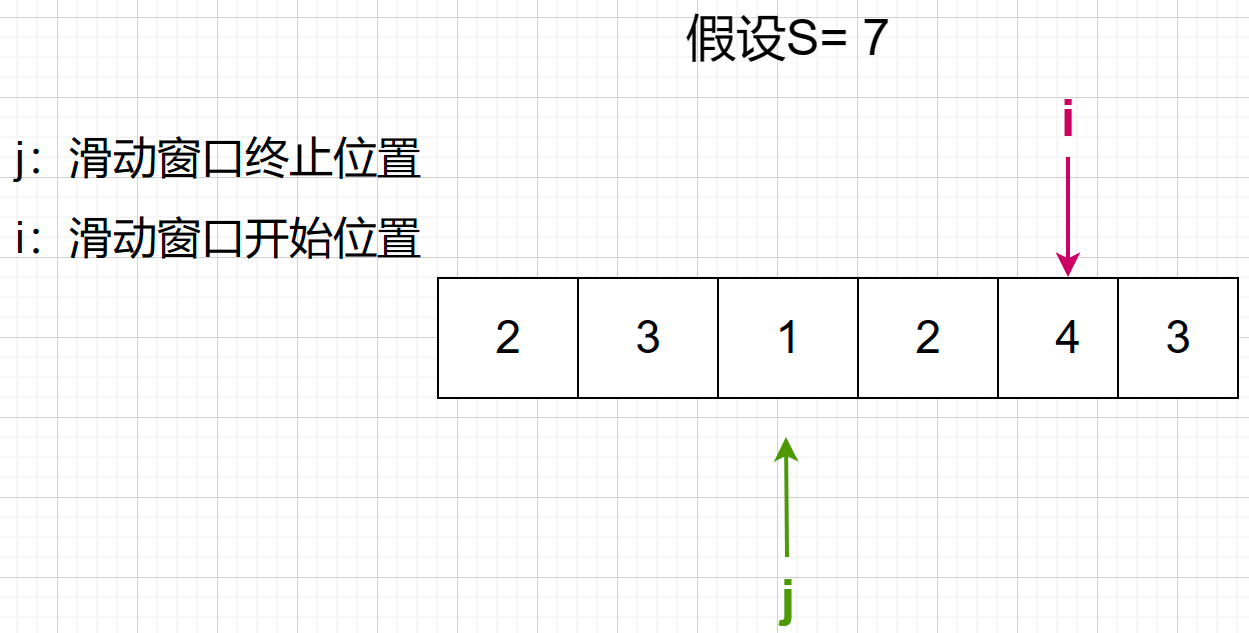
第三步,当出现i累加的和大于等于7并且已经停下来后,终止位置j开始向右移动,当走到滑动窗口不再大于等于7就停下来
第四步,此时滑动窗口已不再大于等于7了,i就可以继续向右走了
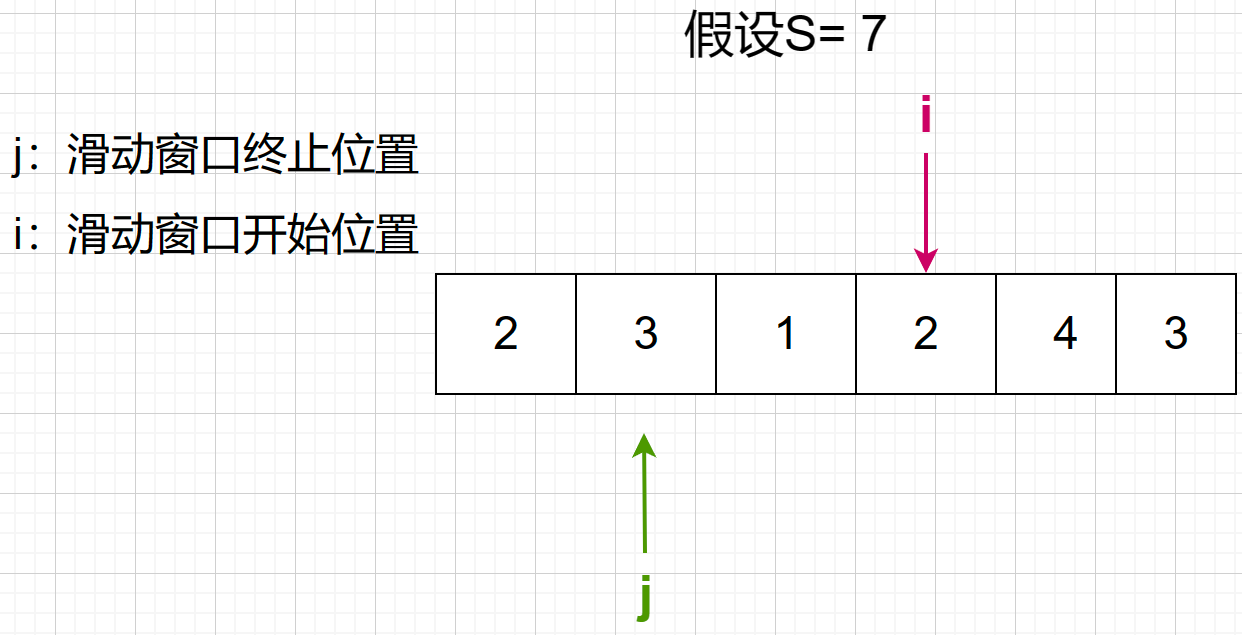
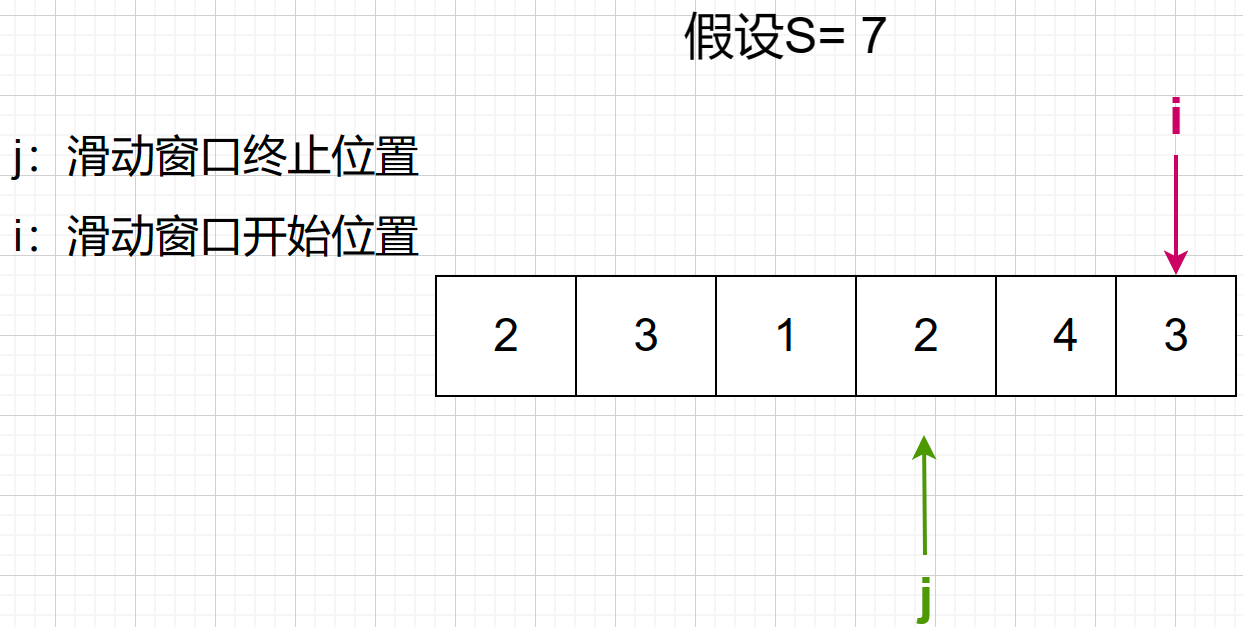
第五步,此时,滑动窗口已经大于等于7了,j就向右移到滑动窗口不大于等于7的位置就可以了,会发现1 + 2 + 4 = 7,需要继续向右走 ,长度为3
2 + 4 < 7,j停止走动

第六步,滑动窗口不再大于等于7了,i继续向右走
第七步,滑动窗口已大于等于7了,2 + 4 + 3 = 9 < 7 ,长度为3 , j继续向下移动
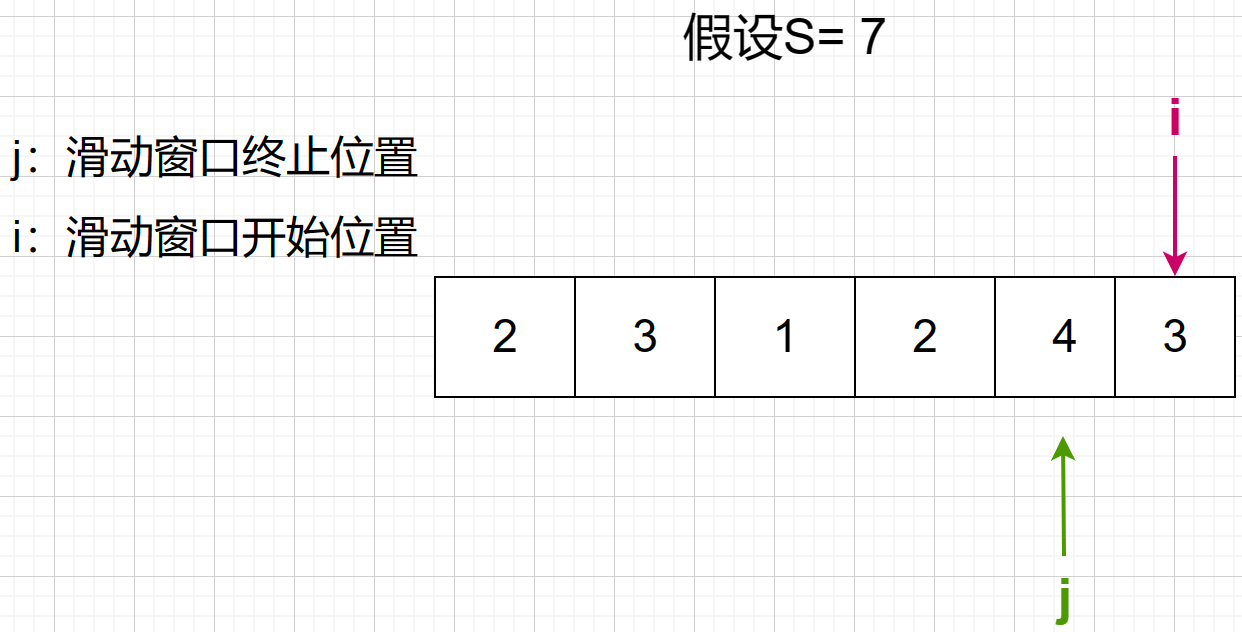
最后找到 4,3 ,长度为2, 是最短距离。
其实从动画中可以发现**滑动窗口也可以理解为双指针法的一种!**只不过这种解法更像是一个窗口的移动,所以叫做滑动窗口更适合一些。
在本题中实现滑动窗口,主要确定如下三点:
- 窗口内是什么?
- 如何移动窗口的起始位置?
- 如何移动窗口的结束位置?
窗口就是 满足其和 ≥ s 的长度最小的 连续 子数组。
窗口的起始位置如何移动:如果当前窗口的值大于s了,窗口就要向前移动了(也就是该缩小了)。
窗口的结束位置如何移动:窗口的结束位置就是遍历数组的指针,也就是for循环里的索引。
解题的关键在于 窗口的起始位置如何移动,如图所示:
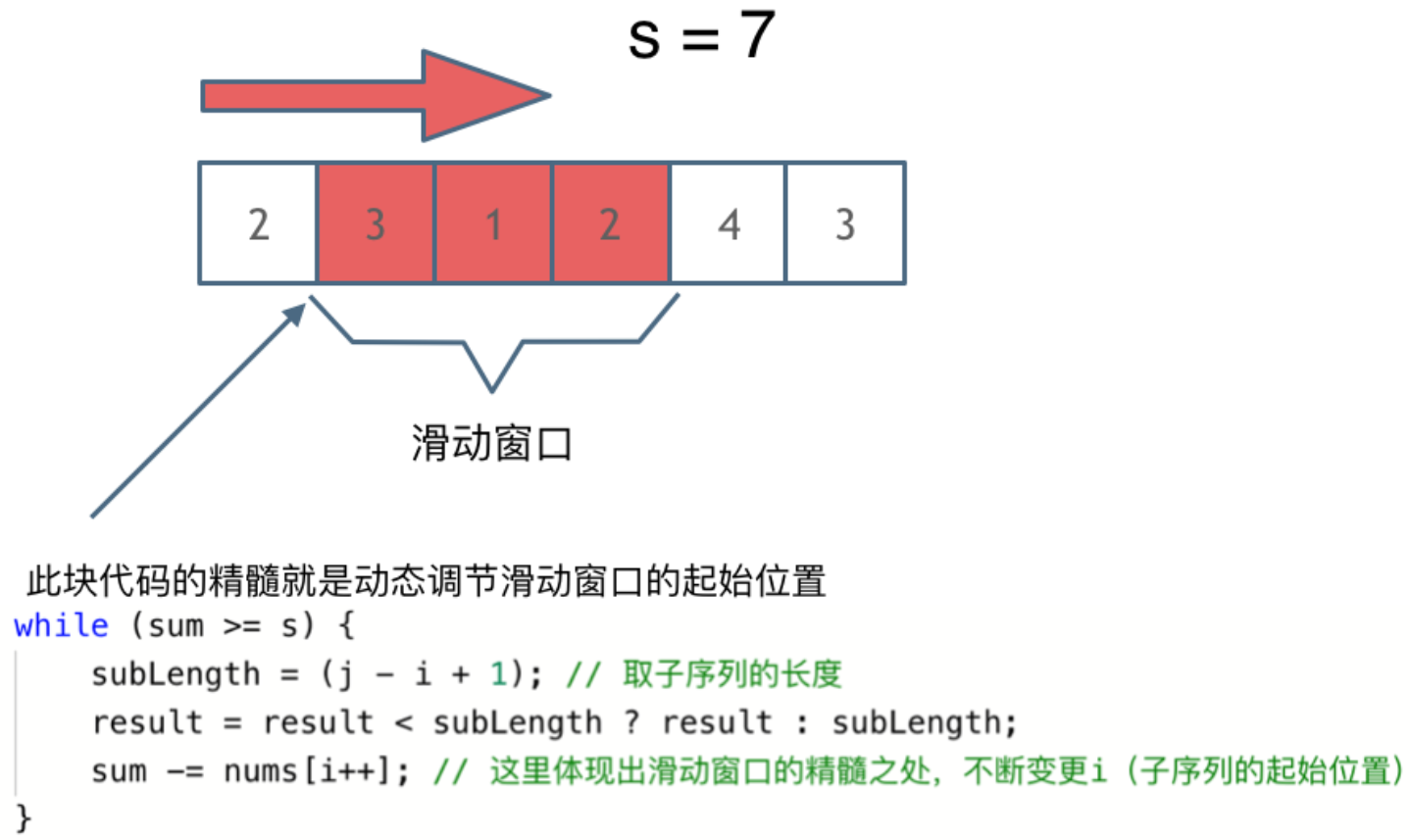
可以发现滑动窗口的精妙之处在于根据当前子序列和大小的情况,不断调节子序列的起始位置。从而将O(n^2)暴力解法降为O(n)。
代码如下:
class Solution {/*** 使用滑动窗口方法来找到最小长度的子数组* s 目标值*nums 正整数数组*return 最小长度的子数组的长度*/public int minSubArrayLen(int s, int[] nums) {int left = 0; // 左指针int sum = 0; // 当前滑动窗口的和int result = Integer.MAX_VALUE; // 最小长度,默认为最大值for (int right = 0; right < nums.length; right++) { // 右指针遍历数组sum += nums[right]; // 将当前元素加入滑动窗口的和while (sum >= s) { // 当滑动窗口的和大于等于目标值result = Math.min(result, right - left + 1); // 更新最小长度sum -= nums[left++]; // 左指针右移,从滑动窗口的和中减去左边界的元素}}return result == Integer.MAX_VALUE ? 0 : result; // 返回最小长度,如果不存在满足条件的子数组,则返回0}
}
- 时间复杂度:O(n)
- 空间复杂度:O(1)
一些录友会疑惑为什么时间复杂度是O(n)。
不要以为for里放一个while就以为是O(n^2)啊, 主要是看每一个元素被操作的次数,每个元素在滑动窗后进来操作一次,出去操作一次,每个元素都是被操作两次,所以时间复杂度是 2 × n 也就是O(n)。
两种方法的区别
暴力解法和滑动窗口方法之间的区别如下:
- 暴力解法:
- 暴力解法是一种简单直接的方法,在给定数组中遍历所有可能的连续子数组,计算它们的和,然后找到满足和大于等于目标值s的最小长度。
- 具体操作是使用两个嵌套的for循环,外层循环遍历所有可能的起始位置,内层循环遍历以当前起始位置为起点的所有连续子数组。
- 对于每个子数组,计算它们的和并与目标值s进行比较。如果和大于等于目标值s,则更新最小长度。
- 这种方法的时间复杂度为O(n^2),因为需要遍历所有可能的子数组。在最坏的情况下,数组中可能会有n个连续子数组。
- 空间复杂度为O(1),因为只使用了常数级别的额外空间。
- 滑动窗口方法:
- 滑动窗口方法使用两个指针来构建滑动窗口,左指针和右指针分别表示滑动窗口的左边界和右边界。
- 首先,将左指针和右指针都指向数组的第一个元素。
- 然后,移动右指针,将元素逐个加到滑动窗口的和中,直到滑动窗口的和大于等于目标值s为止。
- 当滑动窗口的和大于等于目标值s时,记录当前滑动窗口的长度,并更新最小长度。
- 然后,移动左指针,将滑动窗口的左边界向右移动一位,并从滑动窗口的和中减去左边界的元素。
- 重复上述步骤,直到右指针达到数组的末尾。
- 这种方法的时间复杂度为O(n),因为每个元素最多被访问两次(左指针和右指针),没有遍历所有可能的子数组。
- 空间复杂度为O(1),除了常数级别的几个变量外,没有使用额外的空间。
对于给定的示例输入s = 7, nums = [2,3,1,2,4,3],滑动窗口方法可以在O(n)的时间复杂度内找到满足条件的最小长度子数组,而暴力解法则需要O(n^2)的时间复杂度。因此,滑动窗口方法更高效。
总结
- 使用滑动窗口方法可以解决这个问题。定义两个指针,分别表示滑动窗口的左右边界。
- 初始化左指针和右指针都指向数组的第一个元素。
- 然后,移动右指针,将元素逐个加到滑动窗口的和中,直到滑动窗口的和大于等于目标值s为止。
- 当滑动窗口的和大于等于目标值s时,记录当前滑动窗口的长度,并更新最小长度。
- 然后,移动左指针,将滑动窗口的左边界向右移动一位,并从滑动窗口的和中减去左边界的元素。
- 重复步骤3到步骤5,直到右指针达到数组的末尾。
- 返回最小长度,如果不存在满足条件的子数组,则返回0。
- 时间复杂度分析:使用滑动窗口,每个元素最多会被访问两次(左指针和右指针),所以时间复杂度为O(n)。
- 空间复杂度分析:空间复杂度为O(1)。除了常数级别的几个变量外,没有使用额外的空间。
调用minSubArrayLen方法进行测试。将给定的数组nums和目标值s传递给方法,并将返回结果打印出来。预期输出为2,这是因为数组中的子数组[4, 3]的元素之和为7,且为满足条件的最小长度子数组。
测试代码:
package shuzhu;public class Day04 {public static int minSubArrayLen(int[] nums, int s) {int left = 0;int sum = 0;int result = Integer.MAX_VALUE;for(int right = 0;right < nums.length;right++){sum += nums[right];while(sum >= s){result = Math.min(result, right-left+1);sum -= nums[left++];}}return result == Integer.MAX_VALUE ? 0 : result;}public static void main(String[] args) {int[] nums = {2, 3, 1, 2, 4, 3};int s = 7;int result =minSubArrayLen(nums, s);System.out.println("长度最小的连续数组其长度为:"+result);}
}return result == Integer.MAX_VALUE ? 0 : result;}public static void main(String[] args) {int[] nums = {2, 3, 1, 2, 4, 3};int s = 7;int result =minSubArrayLen(nums, s);System.out.println("长度最小的连续数组其长度为:"+result);}
}