郑州网站外包公司sae wordpress 4.3
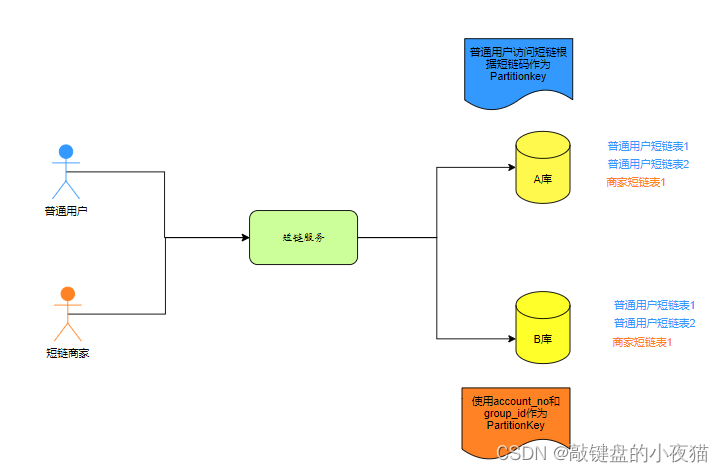
在采用分库分表设计时,通过一个PartitionKey根据散列策略将数据分散到不同的库表中,从而有效降低海量数据下C端访问数据库的压力。这种方式可以缓解单一数据库的压力,提升了吞吐量,但同时也带来了新的问题。对于B端商户而言,如何查看这些数据呢?由于数据被散列到不同的库表中,想要查询它们就需要全库表路由查询,这样分库分表将无法带来优势。例如,生成的短链码散列到不同的数据库抵御了海量消费者的访问压力,但在业务层面上,商家无法查询到自己旗下生成的所有短链码。我们对这个问题进行了进一步的分析,寻求解决方案。
方案一:
字段解析配置。定义hash对应的库表策略关系,每次生成库表位时,根据商家的唯一标识进行hash,找到固定的库表位,然后将短链写入该库表中。当商家查询时,同样根据商家的唯一标识进行hash,找到可能在的库表,采用笛卡尔积方式将数据查出,此种方式不触发全库表路由。
| 库 | 表 | 账号hash |
| a,b | c,1 | 1 |
| a | 1 | 2 |
缺点:随不触发全库表的路由,但所涉及库表都会进行查询,给所涉及的库表造成访问压力;
方案二:
Nosql方案。可利用canl-server监听数据库的变动,kafka缓冲,冗余到es中。
缺点:需要实时维护管理缓存数据库的数据。
方案三:
冗余双写方案。拆分买家库和卖家库:1)买家库,按照用户的id来分库分表;2)卖家库,按照卖家的id来分库分表。下订单的时候写两份数据,在买家库和卖家库各写一份。