做301网站打不开天眼查官网查询入口
计算的本质是数据的计算
数据的计算需要采用格式化的存储,
规则的数据结果,可以快速的按照指定要求存储数据
这里就不得不说二叉树了,二叉树应用场景真的很多
本题讲的是,验证二叉树的前序序列化
换言之,不采用建立树的结构体去判断给定的数据能否构建前序二叉树
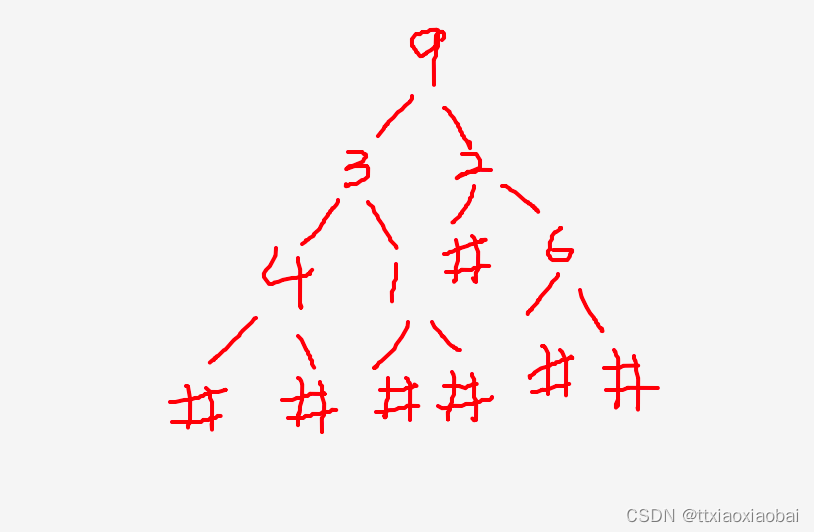
比如前序二叉树的数据为: “9, 3, 4, #, #, 1, #, #, 2, #, 6, #, #”
就这样,给一字符串,包含整数、‘,’, '#'这三种数据类型
然后这个给定的字符串是二叉树的前序序列,现在需要你判定它是不是真的前序序列化(真的前序序列化是可以构建先序二叉树的)
注意哈 # 表示 空节点
//思路,用栈记录槽
//槽 是节点可存储节点的数量。
//栈顶记录 存储 当前节点
// 如果当前节点为空 槽要 -1 (也就是 栈顶 -1 )(如果栈顶减为 0,退栈)
//注意:在遍历的过程中,栈顶槽的大小是这样确定的,如果遍历到的节点为空节点,stk.top() -=1; 如果遍历到的节点非空,那么stk.top() -= 1; stk.push(2); //完成当前节点 槽 的更新,再在栈push 两个槽
//如果栈为空,但是还没有遍历结束 那证明这个序列构建不了先序二叉树
#include <stack>
#include <string>
#include <iostream>bool solution(std::string &str){std::stack<int> stk;int n = str.size();int i = 0;//最开始,如栈根节点stk.push(1);while(i < n){// 栈为空 直接 return falseif(stk.empty()){return false; //line 18}// 如果是 ‘,’ i++if(str[i] == ','){i++; // line 24}else if(str[i] == '#'){// 如果是空节点 当前槽 -1stk.top() -= 1; // line 28if(!stk.top()){stk.pop();}// 别忘了 还要 i++ 待会会讲我怎么gdb 调试找到这个bug 的(我测试的时候,忘了这块,然后调试定位到这个问题了)i++;}else{// 这里的都是非零节点的处理while(i < n && str[i] != ',' && str[i] != '#'){i++;}stk.top() -= 1; // line 36if(!stk.top()){stk.pop();}stk.push(2);}}return stk.emptu();
}
int main(){std::string str = "9,3,4,#,#,1,#,#,2,#,6,#,#";if(solution(str)){std::cout<<" this is true"<<std::endl;}else{std::cout<<" this is false"<<std::endl;}return 0;
}
说明一下 上面的注释 //line xxx 是为了写这篇博客方便 定位这行的位置,注意区分
再说一说调试,因为我运行,输入正确的前序序列返回的也是错误的,后面后就gdb 调试
g++ test_331.cpp -g
gdb a.out
b 18
b 24
b 28
b 36打了四个断点
r
然后单点调试
c
发现一直在 分支 ‘#’ 这块走,
我们定义的是,如果节点为空,槽 - 1
但是这里会一直跑,因为,当栈顶为空,会退栈,把栈下面的第一个元素移成栈顶,接着循环(如果栈 无穷,那在这里死循环 ,因为 i 这个计数器一直没有更新
可以打印 i
p i
好了 ,大概就是这样了。
EOF