鲜花拍卖网站建设市场分析怎么做竞拍网站
目录
一、异步生成Actor示例
二、异步计算示例
参考视频
首先需要在商城中下载“Async Blueprints Extension”插件
一、异步生成Actor示例
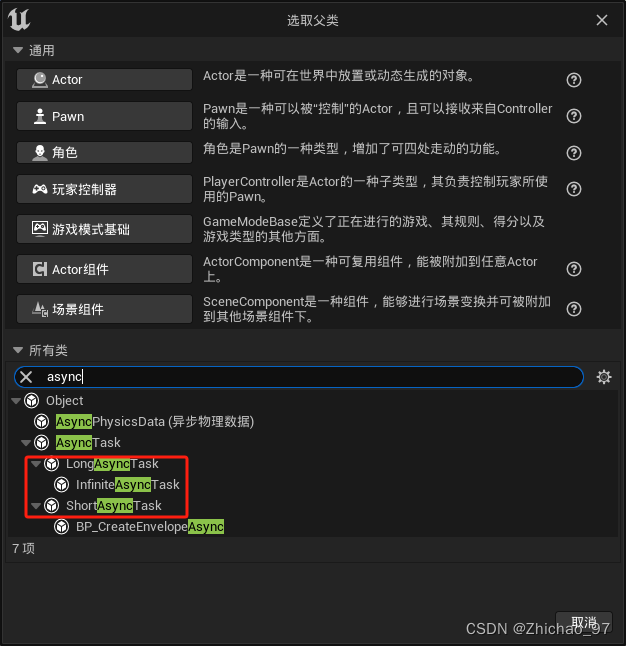
2. 创建一个线程类,这里要指定父类为“LongAsyncTask”、“InfiniteAsyncTask”、“ShortAsyncTask”中的一个
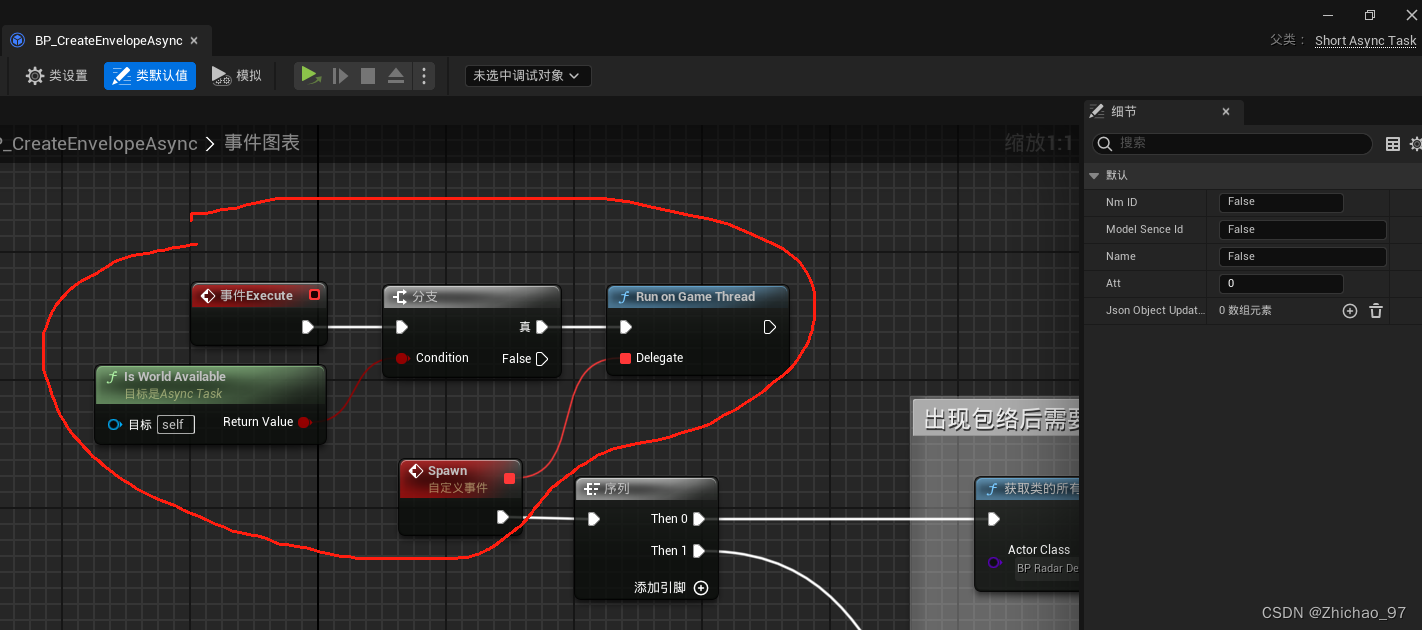
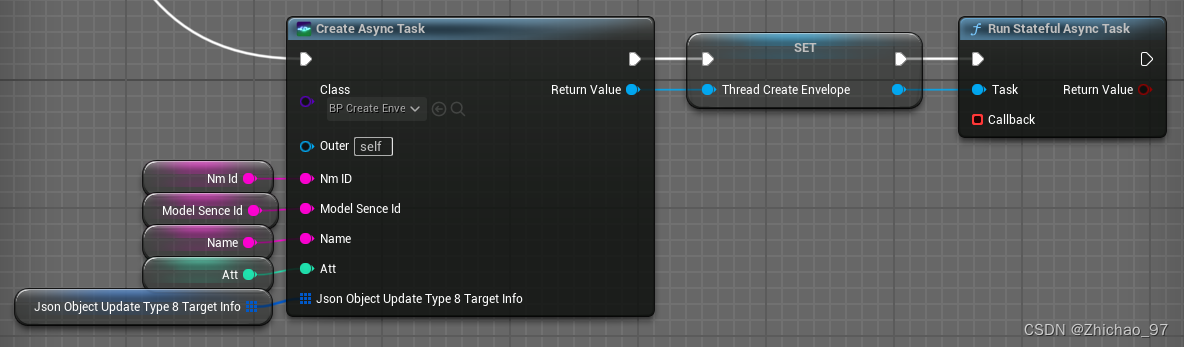
在线程类中添加如下节点,在自定义事件中添加该线程要做的事情,比如生成一个actor
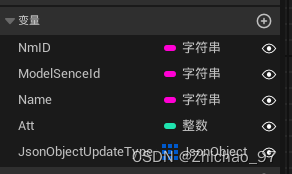
我们可以在这个线程类中创建几个公开的变量,这样当实例化线程类的时候就可以指定这些变量的值,从而实现向线程中传参的作用
3. 实例化线程并启动
二、异步计算示例
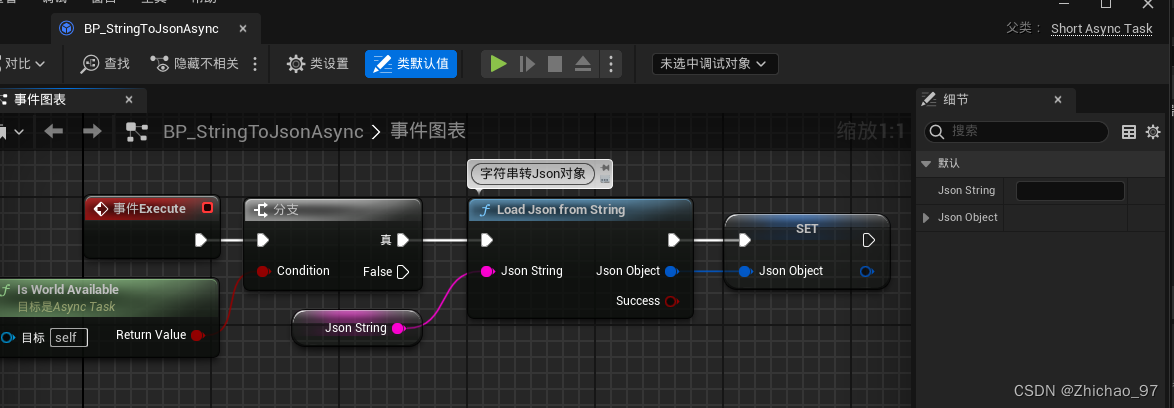
1. 新建一个父类为“ShortAsyncTask”的蓝图类,在事件执行后将json字符串转为json对象
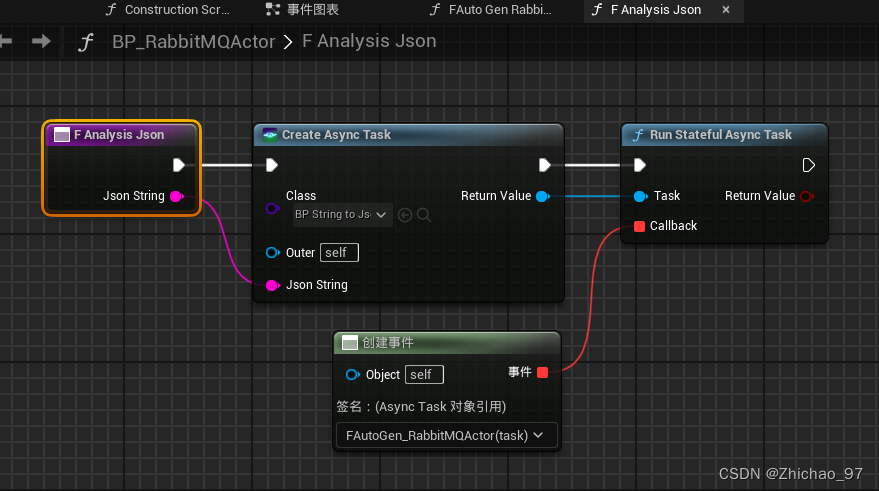
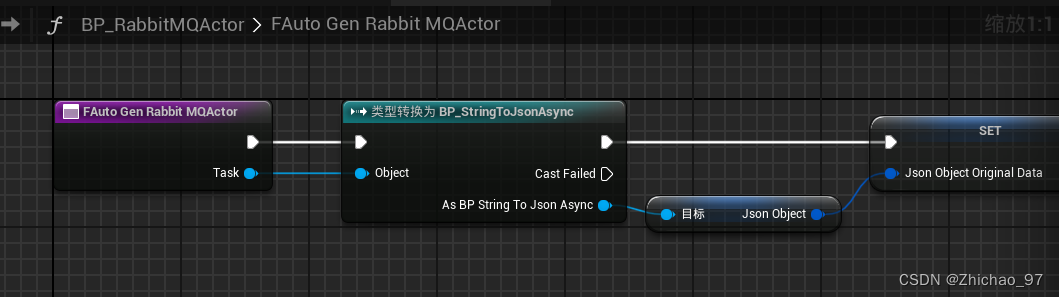
2. 在其它蓝图中创建并运行这个任务,当线程执行完毕后会执行一个事件
此时我们就可以使用转换后的json对象了
参考视频
1. AsyncBlueprintsExtension插件演示:https://www.youtube.com/watch?v=u71D5HZvgbo&feature=youtu.be
2. 将变量传递到异步蓝图: https://www.youtube.com/watch?v=59UMyd4gOyo
3. 使用异步蓝图生成Actor:https://www.youtube.com/watch?v=EbrmdFhz4p4