公司文化墙设计seo站外优化平台
今天来看看ArcGIS中的几个选择的重要使用方法
1、常规选择、
2、模糊查询、
3、组合复合条件查询(AND、OR、IN),
4、空值NULL查询
5、位置选择
推荐学习:
以梦为马,超过万名学员学习ArcGIS入门到实战的应用课程!
一、 常规选择
如下图,要在福建省区县中选择出特定地级市的区县,作业简单的按属性选择即可。
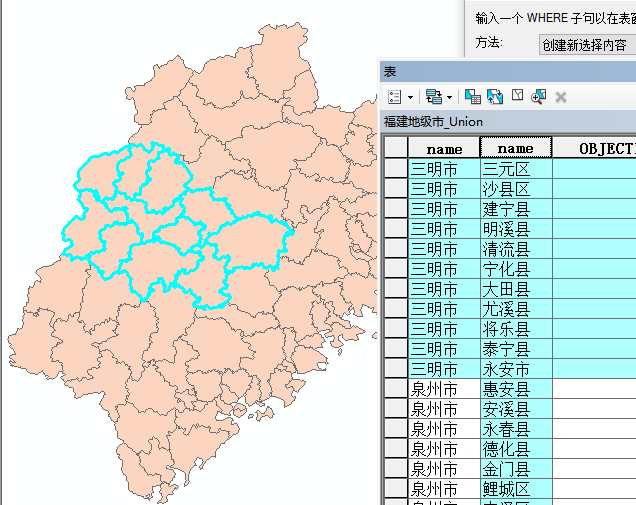
筛选语句:
name = '三明市'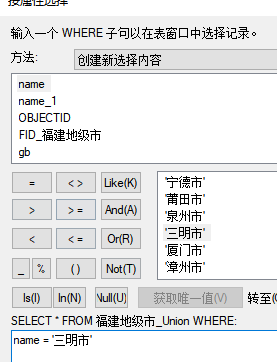
二、 模糊查询
例如我们需要查找福建省区县中带“安”字的区县(福建因为以前海寇猖獗,所以“安”字在福建地方命名上非常常见)。
可以使用like配合%来模糊选择,% 表示其位置可以是任意数量的任何字符:一个字符、一百个字符或无字符。此外,如果您希望在查询时通配符仅代表一个字符,则可使用“_”。
name_1 LIKE '%安%'参考视频教学
ArcGIS属性表模糊查询
三、组合复合条件查询(AND、OR、IN)
通过使用 AND 和 OR 运算符将表达式组合在一起,可构建复杂表达式。
比如要选择福建省福州市中GDP大于1000亿的区县:
地级市 = '福州市' AND 地区_生产总值 >=1000比如要选择福建省福州市、厦门市的区县就需要用OR连接
地级市 = '福州市' OR 地级市 = '厦门市'所以要理解And 且,OR或的逻辑关系。如果我们一次需要选择多个目标,用OR连接的太多,就可以使用IN关系来选择,比如我们要筛选出灌木林地、旱地、乔木林地、农村道路,就可以直接用IN;
DLMC IN( '灌木林地' , '旱地' , '乔木林地' , '农村道路' )如果是筛选不在这里面的可以直接使用NOT IN,
DLMC NOT IN( '灌木林地' , '旱地' , '乔木林地' , '农村道路' )参考视频教学
ArcGIS复合选择(And、IN、OR)一次多个条件
四、 空值查询
可使用 NULL 关键字来选择指定字段为空值的要素和记录。NULL 关键字的前面始终使用 IS 或 IS NOT。
例如,要查找尚未输入 1996 年人口的城市,可使用
POPULATION96 IS NULL或者,要查找已输入 1996 年人口的城市,可使用
POPULATION96 IS NOT NULL五、 按位置选择
利用按位置选择工具,可以根据要素相对于另一图层要素的位置来进行选择。例如,如果您想了解最近的洪水影响了多少家庭,那么可以选择该洪水边界内的所有家庭。
您可使用多种选择方法,选择与同一图层或其他图层中的要素接近或重叠的点、线或面要素。
参考视频教学
ArcGIS位置选择提高篇(相交、质心、包含、被包含)