广州的网站建设公司国外vps加速免费下载
在LabVIEW开发中,点阵图(XY Graph) 是一种强大的工具,尤其适用于需要实时展示大量数据的场景。通过使用点阵图,开发人员能够将实时数据可视化,帮助用户更直观地分析数据变化。
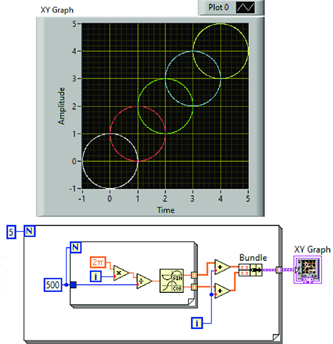
1. 点阵图的优势
点阵图(XY Graph)不仅能够绘制大量数据,还能允许用户自定义X轴和Y轴,使其更适合处理不规则数据、实时监控数据流和复杂曲线的场景。例如,许多工业测试中实时监控温度、压力等物理量变化时,点阵图能展示精确的实时曲线,帮助工程师快速做出判断。
**具体应用:**在一个温度控制系统中,可以使用点阵图来展示随时间变化的温度曲线。点阵图允许你使用时间作为X轴、温度作为Y轴,以便实时查看温度波动情况。
2. 数据优化:合理管理点数
对于大数据量的实时展示,直接绘制大量数据可能会导致系统性能下降。为了避免这一问题,可以使用LabVIEW中的数据下采样(Downsampling) 或数据压缩技术,减少绘制的数据点,降低系统负荷。通过控制图中的点数,你可以确保界面响应速度和数据的准确性两者兼得。
**具体应用:**在一个100Hz的数据采集系统中,假设你需要每秒绘制10,000个数据点。为了减轻绘图负担,你可以将数据压缩为1000个点来绘制,但仍保持大致的曲线形状。这样既不影响分析,又能保证系统流畅运行。
3. 灵活使用缓冲区
在处理大量数据时,LabVIEW的**数据缓冲区(Buffer)**机制非常有用。你可以为点阵图设置固定大小的缓冲区,这样新数据会不断覆盖旧数据,从而始终保持数据展示的最新状态。
**具体应用:**假设你正在监控一段时间内的振动信号,可以将缓冲区设置为1000个数据点,这样每次新数据到达时,旧的数据会被替换,确保展示的是最新的振动数据,且不会使内存过载。
4. 使用多条曲线展示多维数据
点阵图不仅支持单条曲线,还支持多条曲线同时展示。这对于需要展示多个传感器数据或多维数据的场景非常有帮助。通过多条曲线的展示,你可以同时观察多个参数的变化趋势。
**具体应用:**在一个工业设备的健康监测系统中,你可以同时展示设备的温度、压力、振动等多个关键参数。通过不同颜色的曲线同时绘制在点阵图中,便于用户直观地对比这些参数的变化情况。
5. 动态设置图表属性
为了使点阵图更加灵活和美观,你可以通过LabVIEW的编程接口动态修改图表属性,如调整坐标轴范围、设置线条颜色、修改标记点等。这种动态设置功能使得图表能够根据数据自动适应,提升用户体验。
**具体应用:**如果监控系统中的温度异常上升,你可以通过编程自动调整Y轴的范围,使得温度曲线能够完全显示在图表内,避免数据超出显示范围。
6. 适配不同分辨率的显示需求
在不同的应用场景中,可能会涉及到不同分辨率的显示屏,特别是工业现场与办公室环境不同。在LabVIEW开发中,可以通过调整图表尺寸和分辨率,确保在不同显示器上都有清晰的数据展示效果。
**具体应用:**假设你正在开发一个远程监控系统,需要在现场的触摸屏和办公室的电脑屏幕上同时展示数据。你可以设计自动适应分辨率的点阵图显示模块,以确保数据在两种环境下都能完美呈现。
7. 点阵图的交互功能
LabVIEW中的点阵图提供了强大的交互功能,用户可以通过鼠标缩放、平移等操作更详细地查看感兴趣的数据区域。这种交互功能非常适合需要深度分析数据的场景。
**具体应用:**在质量检测系统中,工程师可以放大点阵图中的某个异常区域,仔细分析数据波动的原因,帮助查找设备故障。
8. 例子:振动测试系统的应用
在一个典型的振动测试系统中,点阵图被用来实时绘制设备的振动频率和振幅。通过合理的点阵图设置,用户可以实时监控设备的振动状态,并快速捕捉异常波动。
使用技巧:
-
通过缓冲区确保始终展示最新的振动数据;
-
通过动态调整Y轴范围,确保不同幅度的振动都能被正确展示;
-
使用多条曲线同时展示不同频段的振动信号,帮助用户快速分析设备的健康状态。