离石网站建设网站开发人员绩效考核表
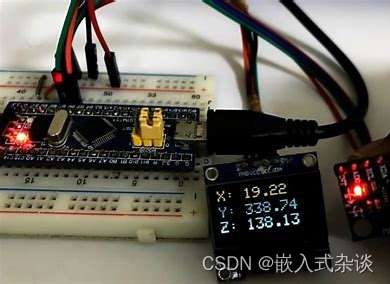
基于STM32的MPU6050姿态控制设计是无人机、飞行器等飞行器件开发中的核心技术之一。在本文中,我们将介绍如何利用STM32和MPU6050实现飞行器的姿态控制,并提供相应的代码示例。
1. 硬件连接及库配置
首先,我们需要将MPU6050连接到STM32微控制器上。MPU6050一般通过I2C接口与STM32连接,因此需要配置相应的GPIO和I2C硬件。另外,我们还需要使用相应的I2C驱动库来进行通讯,通常是通过ST公司提供的STM32Cube库来完成。
以下是一个简单的I2C硬件初始化示例(基于STM32Cube HAL库):
```c
void I2C_Init() {hi2c.Instance = I2C1;hi2c.Init.Timing = 0x00707CBB;hi2c.Init.OwnAddress1 = 0;hi2c.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c.Init.OwnAddress2 = 0;hi2c.Init.OwnAddress2Masks = I2C_OA2_NOMASK;hi2c.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;if (HAL_I2C_Init(&hi2c) != HAL_OK) {Error_Handler();}
}
```2. 获取 MPU6050 加速度和陀螺仪数据
一旦硬件和库配置完成,我们可以通过I2C通信协议获取MPU6050的加速度和陀螺仪数据。
```c
// 读取MPU6050数据
void MPU6050_ReadData(int16_t* accelerometerData, int16_t* gyroscopeData) {uint8_t buffer[14];HAL_I2C_Mem_Read(&hi2c, MPU6050_ADDRESS, ACCEL_XOUT_H_REG, I2C_MEMADD_SIZE_8BIT, buffer, 14, 100);// 解析加速度计数据accelerometerData[0] = (int16_t)((buffer[0] << 8) | buffer[1]);accelerometerData[1] = (int16_t)((buffer[2] << 8) | buffer[3]);accelerometerData[2] = (int16_t)((buffer[4] << 8) | buffer[5]);// 解析陀螺仪数据gyroscopeData[0] = (int16_t)((buffer[8] << 8) | buffer[9]);gyroscopeData[1] = (int16_t)((buffer[10] << 8) | buffer[11]);gyroscopeData[2] = (int16_t)((buffer[12] << 8) | buffer[13]);
}
```3. 姿态控制算法
姿态控制是通过融合加速度计和陀螺仪的数据来控制飞行器的姿态。一种常用的姿态控制算法是PID(Proportional-Integral-Derivative,比例-积分-微分)控制器。PID算法可根据当前姿态误差的大小调整飞行器的控制输出。
以下是一个简单的PID控制器示例:
```c
#define KP 0.5f // 比例系数
#define KI 0.2f // 积分系数
#define KD 0.1f // 微分系数float error = 0.0f;
float integral = 0.0f;
float derivative = 0.0f;
float previousError = 0.0f;
float controlOutput = 0.0f;// PID控制器
float PIDController(float target, float current, float dt) {error = target - current;integral += error * dt;derivative = (error - previousError) / dt;controlOutput = KP * error + KI * integral + KD * derivative;previousError = error;return controlOutput;
}
```4. 应用示例
基于上述的MPU6050数据获取和姿态控制算法,我们可以实现飞行器的姿态控制。具体而言,我们可以将控制输出与飞行器的电机和舵机进行关联,实现对飞行器的姿态调整和稳定控制。
5. 总结
基于STM32和MPU6050实现飞行器的姿态控制是一个复杂而有挑战性的任务。除了上述提到的硬件配置和算法实现,还需要考虑校准和滤波等细节问题。希望这篇文章对于基于STM32的MPU6050飞行器姿态控制设计与实现有所帮助。请注意,由于代码的完整性和特定项目的环境要求,上述示例代码可能需要根据实际情况进行修改和优化。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料