合肥做企业网站的网络公司顺德做网站设计的公司
在阿里云云计算平台中,对象存储服务(OSS)是一种高度可扩展的云存储服务,提供了安全、可靠、低成本的数据存储解决方案。在使用OSS时,正确配置权限是至关重要的,以确保数据的安全性和访问控制。本文将介绍阿里云OSS权限开通的步骤,并分享一些最佳实践,帮助您更好地管理和控制您的存储空间。
步骤一:登录阿里云控制台
首先,在浏览器中打开阿里云官方网站(https://www.aliyun.com/),点击右上角的 “登录” 按钮,输入您的阿里云账号和密码,成功登录后进入阿里云控制台。
步骤二:进入OSS管理页面
在阿里云控制台首页,通过搜索或在“云产品”中找到 “对象存储 OSS”,点击进入OSS管理页面。

步骤三:创建Bucket
在OSS管理页面,点击 “创建存储空间” 按钮,按照向导填写存储空间的名称、地域、访问权限等信息,并点击 “确定” 完成Bucket的创建。

步骤四:设置Bucket权限
进入所创建的Bucket详情页面,点击 “权限管理”,然后点击 “授权策略管理”。

步骤五:创建访问权限策略
在授权策略管理页面,点击 “新建授权策略”,然后根据您的需求填写策略名称和策略内容。策略内容可以使用阿里云提供的策略语法进行编写,以控制对Bucket的访问权限。

步骤六:绑定权限策略
在授权策略管理页面,找到刚刚创建的访问权限策略,点击 “绑定权限”,选择要授权的用户或用户组,并设置权限的具体操作(如读、写、删除等)。
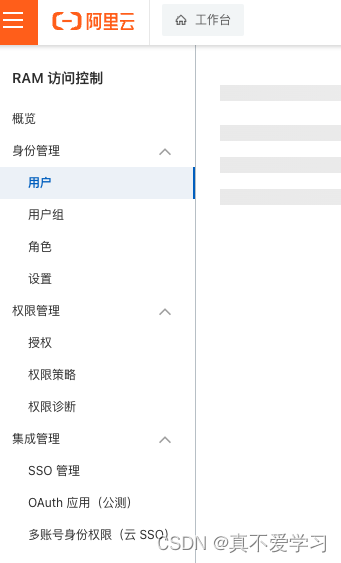
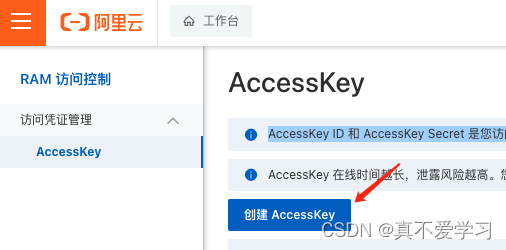
步骤七:AccessKey申请
步骤八:完成权限开通
点击 “确定” 完成权限开通操作。
除了以上的步骤,以下是一些阿里云OSS权限开通的最佳实践:
遵循最小权限原则:在设置权限时,应根据具体需求授予最小权限,避免赋予过高的权限,以减少潜在的安全风险。
使用策略语法:了解并使用阿里云提供的策略语法可以更精确地控制和管理权限,确保权限的准确性和可维护性。
定期审查权限:定期审查已授予的权限,查看是否有不再需要的权限,并及时撤销或修改权限,以保持权限的精简和有效性。
使用子账号和角色:为了更好地管理权限,建议使用子账号和角色来控制和划分不同用户或团队的权限范围。
总结:
通过以上步骤和最佳实践,您可以正确配置和管理阿里云OSS的权限,确保数据的安全和访问控制。合理控制权限将有助于提高存储空间的安全性,并为团队提供更好的管理和协作体验。
希望这篇博文能对您有所帮助,如果您有任何问题或需要更多详细信息,请随时向我提问。感谢阅读!