个人怎么建设图书网站注册公司2个人可以吗
数组就是一组数据的集合,把一系列数据组织起来,形成一个可操作的整体。
PHP中的数组与Java的数组不一样,需要有key(键)和value(值),相当于Java中数组和键值对的结合。
数组的定义
array()语言结构法
array()语言结构中的数组元素使用“键=>值”的方式进行表示,各元素之间使用逗号(,)进行分割,比如:
<?php$ProgrammingLanguage =array("java","c","Assembly Language","Rust","PHP","go");//定义数组
?>
赋值方式
使用赋值方式定义数组,实际上就是创建一个数组变量,然后使用赋值运算符直接给变量赋值。比如:
$fruits[] = "apple";
$fruits[] = "orange";
$fruits[] = "banana";
短数组定义法
短数组定义法([])与array()语法结构相同,只需将array()替换为[]即可。
$grades=[1,2,3,4,5,6];
数组的输出
print_r函数
print_r(数组名)就可以把数组里边的内容通过下边的格式进行输出:
Array([键1] => 值1,[键2] => 值2,[键3] => 值3,......)
下边的代码:
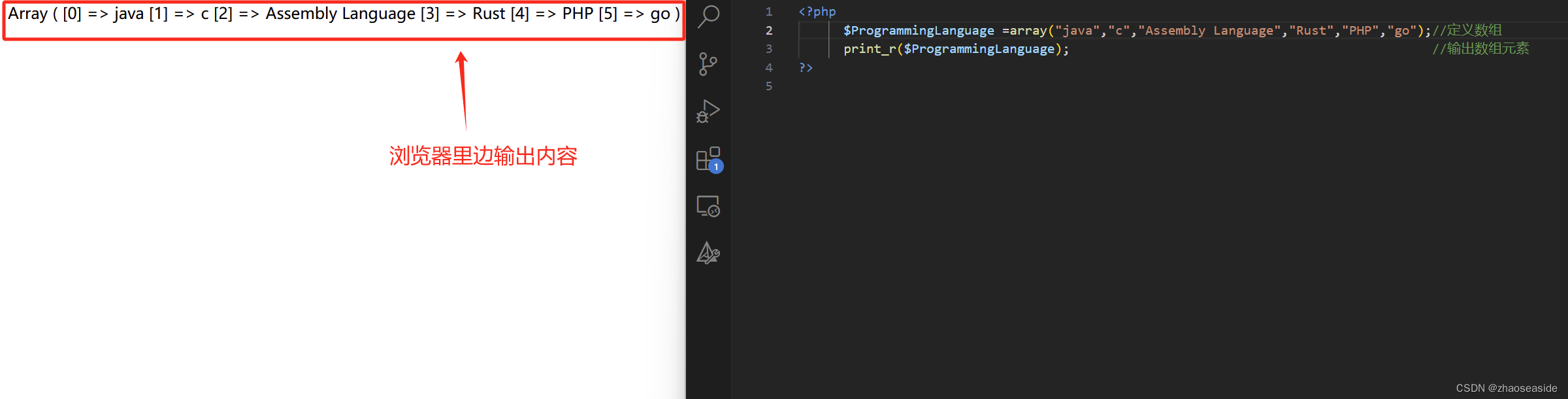
<?php$ProgrammingLanguage =array("java","c","Assembly Language","Rust","PHP","go");//定义数组print_r($ProgrammingLanguage);
?>
会输出Array ( [0] => java [1] => c [2] => Assembly Language [3] => Rust [4] => PHP [5] => go )。
var_dump函数
var_dump()函数是系统函数,作用是输出变量的相关信息。
var_dump(数组名)输出格式是:
array(数组元素个数) { [键1]=> 类型 值1 [键2]=> 类型 值2 [键3]=> 类型 值3 [键4]=> 类型 值4 ......}
比如
<?php$grades=[1,5,3,4];var_dump($grades);//输出数组元素
?>
输入如下:
array(4) { [0]=> int(1) [1]=> int(2) [2]=> int(3) [3]=> int(4) }
再比如
<?php$ProgrammingLanguage =array("java","c","Assembly Language","Rust","PHP","go");//定义数组print_r($ProgrammingLanguage);
?>
会输出
array(6) { [0]=> string(4) "java" [1]=> string(1) "c" [2]=> string(17) "Assembly Language" [3]=> string(4) "Rust" [4]=> string(3) "PHP" [5]=> string(2) "go" }
echo函数加foreach
遍历索引数组
格式为:
foreach ($数组名 as $元素名){
循环体;
}
比如:
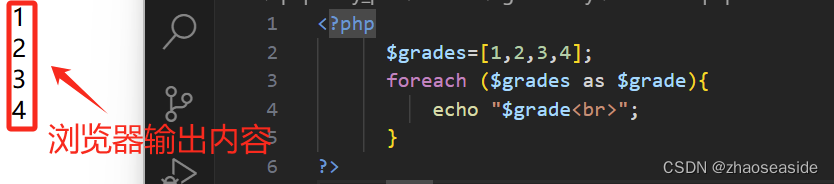
<?php$grades=[1,2,3,4];foreach ($grades as $grade){echo "$grade<br>";}
?>
遍历关联数组
foreach($array as $key => $value){
循环体;
}
//$array表示数组 as $key表示键 $value表示值
比如:
<?php$ProgrammingLanguage =array("java","c","Assembly Language","Rust","PHP","go");//定义数组foreach($ProgrammingLanguage as $key => $value){echo "Key: " . $key . ", Value: " . $value." <br>";}
?>
