电子商务网站分类网站开发流程图和介绍
在现代制造业中,数据追溯已经越来越得到重视,特别是那些推行精益生产的企业重要性就更加突出了,而制造执行系统(MES)作为一种关键的生产管理工具,是能很好的为制造企业提供数据追溯功能。今天,和大家分享有关制造执行系统(MES)的数据追溯技术,希望对数字化转型的企业能有所帮助。
01 什么是数据追溯?
数据追溯是指对产品或过程中产生的各项数据进行记录、存储和索引,并通过可追溯性手段实现对其源头、流向和变化过程的准确追踪和还原。通过数据追溯,企业可以实现对产品质量、生产过程等关键信息的全面掌握,从而提高生产效率、降低风险并满足监管要求。基于数据来源和追溯范围的不同,MES的数据追溯一般可以分为以下几类:
1. 材料追溯
材料追溯是指对所使用的原材料、零部件等物料进行追溯。通过记录和追踪每个物料的批次、供应商信息和使用情况,企业可以准确了解产品所用材料的来源,以便在质量问题出现时进行快速定位和召回。
2. 工艺追溯
工艺追溯是指对生产过程中各项工艺参数进行记录和追踪。通过监控和追踪生产过程中的关键参数,如温度、压力、速度等,企业可以实现对产品质量和工艺稳定性的控制,及时发现并纠正潜在问题,确保产品符合质量标准。
3. 过程追溯
过程追溯是指对生产过程中的每个环节进行记录和追踪。通过追溯整个生产过程中的操作记录、设备状态、人员动态等信息,企业可以实现对生产过程的可视化管理和全面监控,提高生产效率和质量可控性。
4. 质量追溯
质量追溯是指对产品质量相关数据进行记录和追踪。通过追溯产品的检测数据、测试结果和质量指标,企业可以准确评估产品质量,并根据追溯结果进行质量分析和改进,提升产品质量水平。
总而言之,制造执行系统(MES)作为一种重要的生产管理工具,能够提供多种数据追溯功能。通过MES的数据追溯技术,企业可以实现对材料、工艺、过程和质量等方面的全面追溯,从而确保产品质量、提高生产效率,并满足监管和合规要求。在未来的制造业发展中,数据追溯技术将继续发挥着重要的作用,帮助企业实现智能化、可持续发展的目标。
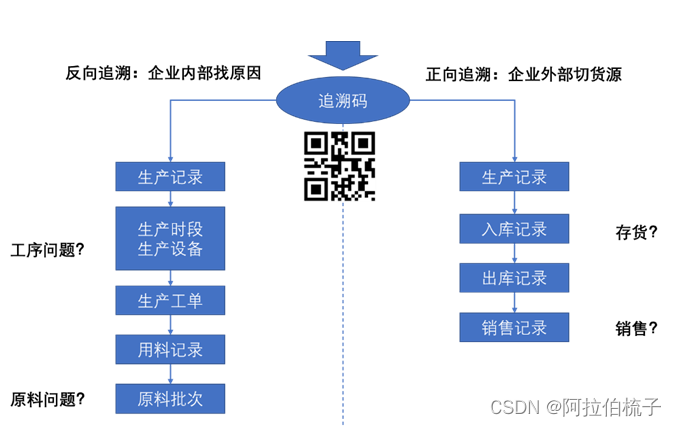
02 MES数据追溯原理介绍
MES(制造执行系统)的数据追溯是指通过该系统对生产过程中产生的各项数据进行记录、存储和索引,以实现对其源头、流向和变化过程的准确追踪和还原。MES的数据追溯功能可以为企业提供全面的生产过程可视化和控制,帮助企业提高质量管理、生产效率和合规性。MES的数据追溯主要包括以下几个方面:
1. 追溯数据收集
MES通过与生产过程中的设备、传感器、计量仪表等进行连接,实时获取生产过程中的数据。这些数据可以涵盖材料、工序、工艺参数、设备状态、操作记录等多个维度。MES还可以与企业其他系统(如ERP、SCADA等)进行数据集成,获取更全面的追溯数据。
2. 数据记录和存储
MES将收集到的数据进行记录和存储,确保其完整性和可靠性。通常采用数据库或云存储等技术,将数据按照时间顺序进行存储,并关联到相应的产品或批次。这样可以方便后续的数据检索和分析。
3. 数据索引和查询
MES建立了一套有效的数据索引和查询机制,使得用户能够快速检索和查询特定时间段、特定产品或特定工序的数据。通过灵活的查询条件,用户可以获取所需的追溯数据,并对其进行分析和比对。
4. 数据可视化和报告
MES将追溯数据以图表、报表等形式进行可视化展示,帮助用户直观地理解生产过程中的数据变化趋势和异常情况。这些可视化结果还可以生成定制化的报告,用于内部管理、质量认证和监管合规等目的。
5. 异常追溯和分析
当出现质量问题或异常情况时,MES能够帮助企业快速定位问题源头并进行追溯分析。通过查看相关数据,比对不同批次或工序间的差异,企业可以找到导致问题的原因,并采取相应的纠正措施,从而改善产品质量和生产效率。
通过以上可以看出,MES的数据追溯功能对于企业来说具有重要意义。它能够为企业提供全面、准确的数据支持,实现对生产过程的可追溯性管理,从而帮助企业提高质量水平、降低风险并满足监管要求。
03 MES数据追溯应用场景
MES(制造执行系统)数据追溯是指通过记录和分析制造过程中产生的数据,实现对产品、原材料、设备等信息的追踪和溯源。常用场景包括:
1. 批次追溯
在制造过程中,可以通过MES系统记录每个批次的生产参数、操作记录、质检结果等信息,以便在需要时能够追溯到具体的批次,进行问题排查和质量追溯。例如,在食品行业,如果某批产品出现质量问题,通过MES数据追溯可以确定受影响的批次并采取相应的措施。
2. 物料追溯
MES系统可以跟踪原材料的来源、供应商信息、采购日期等,确保原材料的质量和可追溯性。这对于需要遵守质量标准和法规的行业尤为重要,如医药制造业。如果某个成品发现存在质量问题,MES数据追溯可以帮助确定使用了哪些原材料,并追溯到供应商和采购记录。
3. 设备维护追溯
通过MES系统记录设备的运行状态、维护记录和维修历史,可以及时发现设备故障和异常情况,并进行维护追溯。例如,在汽车制造业中,通过MES数据追溯可以跟踪到制造过程中使用的设备,并了解设备的维护情况,以确保生产线的正常运行。
4. 工艺优化
MES数据追溯可以帮助制造企业分析制造过程中的数据,识别瓶颈和改进机会,从而优化工艺流程和提高生产效率。例如,在电子制造业中,通过MES数据追溯可以分析生产过程中的工序时间、工序顺序等信息,找到优化生产流程的方法,提高产品的交付速度。
这些场景只是MES数据追溯的一部分,实际应用中还有很多其他的应用场景,根据不同行业和企业的需求,可以定制开发适合自身业务的MES系统,实现更精细化的数据管理和追溯。
04 MES数据追溯常遇问题及优化措施
在实际数字化工厂MES应用过程,由于设计或使用不当,数据追溯过程中也可能会存在诸多问题,常见问题包括:
1. 数据质量问题
可能存在数据录入错误、数据缺失或不完整等情况,导致追溯结果的准确性受到影响。解决这个问题的关键是加强数据采集和录入的质量管理,例如通过自动化数据采集、数据验证机制和培训员工等方式来减少错误。
2. 数据追溯复杂度
在大规模生产环境中,涉及到的数据量庞大,追踪产品的整个生命周期可能需要反向追溯多个环节。为了简化追溯过程,可以对数据进行有效的分类和标识,建立起严密的数据关联关系,并利用先进的数据分析技术来优化追溯路径。
3. 系统集成困难
企业往往拥有多个独立的系统(如ERP、PLM等),这些系统之间的数据流通和互操作可能存在障碍,使得MES数据追溯变得复杂。为了解决这个问题,可以采用标准化的接口和协议,实现各个系统之间的无缝衔接,确保数据能够顺畅流通。
4. 安全与隐私保护
MES数据追溯涉及到大量的敏感信息,包括产品设计、生产参数、原材料供应商等。确保数据的安全性和隐私保护是一个重要的挑战。优化措施包括加密数据传输、权限管理、审计跟踪等,以保护数据的机密性和完整性。
为了优化MES数据追溯,以下是一些常见的措施:
1. 自动化数据采集
采用自动化手段收集数据,减少人工录入错误,提高数据质量和准确性。
2. 数据标准化与分类
建立统一的数据标准和分类体系,对数据进行规范化处理,便于后续的查询和追溯。
3. 数据分析与挖掘
利用数据分析技术,对追溯数据进行挖掘和分析,发现潜在问题和改进点,优化生产流程和质量控制。
4. 强化系统集成能力
通过采用标准化接口和协议,实现不同系统之间的无缝集成,确保数据的流通和一致性。
5. 安全与隐私保护
加强数据安全管理,采用加密传输、身份认证、权限控制等措施,保护数据的隐私和机密性。
6. 培训和意识培养
加强员工的培训和意识培养,提高他们对MES数据追溯的重要性和正确操作方法的认识,确保数据的准确性和可靠性。
通过这些优化措施,可以提高MES数据追溯的效率和精确性,帮助企业更好地管理生产过程和提升产品质量。