做非法网站有哪些公司关于网站设计公司的简介
此文章为学习了 尚硅谷B站课程 后的学习笔记
【尚硅谷】Shell脚本从入门到实战_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1hW41167NW/?spm_id_from=333.337.search-card.all.click&vd_source=68e0bbe20c8b1102b59ced40f67db628注意:需要先学Linux基础命令后,学习shell命令
https://www.bilibili.com/video/BV1hW41167NW/?spm_id_from=333.337.search-card.all.click&vd_source=68e0bbe20c8b1102b59ced40f67db628注意:需要先学Linux基础命令后,学习shell命令
Linux常用基础命令-CSDN博客![]() https://blog.csdn.net/2302_78022640/article/details/149337415?spm=1011.2415.3001.5331
https://blog.csdn.net/2302_78022640/article/details/149337415?spm=1011.2415.3001.5331
零基础 Shell 教学全集:全面入门、精讲实例、实战脚本
第 1 章:什么是Shell
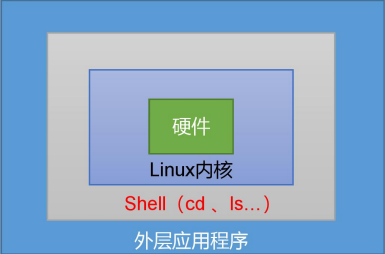
Shell 是一个命令行解释器
Shell 是 用户与 Linux 内核交互的核心接口,兼具 命令解释器 和 脚本编程语言 的双重身份,也可理解为包裹内核的 “保护壳”(隔离用户直接操作内核,保障系统安全)。以下从核心逻辑、功能特性、常见版本展开解析:
核心作用:连接用户与内核
- 命令中转:接收用户输入的指令(如
ls查看文件、cd切换目录),将其转换为内核能理解的格式,驱动内核执行操作,再把结果反馈给用户。 - 安全隔离:用户无法直接访问内核,必须通过 Shell 交互,避免误操作破坏系统核心,就像 “门卫” 守护内核。
1.1 常见 Shell 解析器
Linux 系统提供了多种 Shell 解析器,我们可以通过以下命令查看系统中可用的 Shell 解析器:
cat /etc/shells
输出可能为:
/bin/sh
/bin/bash
/usr/bin/sh
/usr/bin/bash
/bin/tcsh
/bin/csh
这表示当前系统中安装了这些 Shell 解析器,其中 bash 是最常用的默认的一种。
1.2 bash 和 sh 的关系
在很多 Linux 系统中,sh 实际上是 bash 的一个链接(符号链接),我们可以通过以下命令查看它们的关系:
(本文章第九章有说明grep的使用,正则表达式)
ll | grep bash
含义是:
-
ll:是ls -l的别名,列出当前目录下的文件详细信息(包括权限、所有者、大小、修改时间等)。 -
grep bash:从ll的输出中筛选出包含 “bash” 的行。
输出:

这里的 lrwxrwxrwx 表示 sh 是一个符号链接,箭头 -> 后面的 bash 表示它链接到 bash,这意味着执行 sh 命令实际上等同于执行 bash 命令。
1.3 查看当前默认 shell
要查看当前系统默认使用的 Shell 解析器,可以使用以下命令:
echo $SHELL
在 CentOS 系统中,输出通常为:
/bin/bash
这表明 CentOS 默认的 Shell 解析器是 bash。
第 2 章:Shell 脚本入门
2.1 脚本格式要求
编写 Shell 脚本时,有一个固定的格式要求:脚本必须以 #!/bin/bash 开头,这一行的作用是指定脚本使用 bash 解析器来执行。同时,为了便于识别,Shell 脚本通常使用 .sh 作为后缀名。
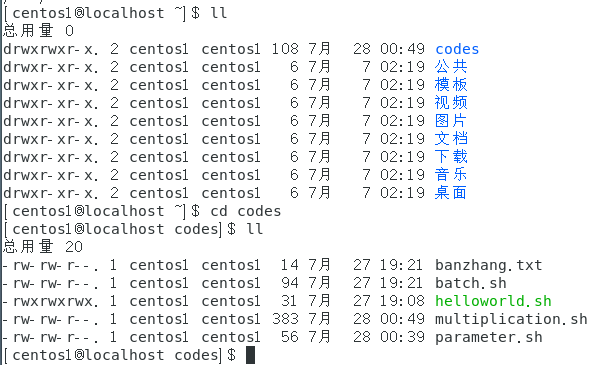
可以先建一个文件夹:
mkdir codescd codes如图例:
2.2 Hello World 示例
下面我们来编写第一个 Shell 脚本,实现输出 "helloworld" 的功能。
步骤:
- 创建脚本文件:
touch helloworld.sh - 编辑脚本内容:
(打开后按 “i” 开始编写,写完后按 “Esc” ,再输入 “:wq” 出来)(下面这步不会的请先学linux基础命令)vim helloworld.sh - 在打开的文件中输入以下内容:
#!/bin/bash echo "helloworld"
2.3 三种执行方式
Shell 脚本有多种执行方式,不同的方式有不同的特点和使用场景。
第一种:不需要执行权限(bash/sh + 路径)
这种方式是通过 bash 或 sh 命令来执行脚本,不需要给脚本赋予可执行权限。可以使用相对路径或绝对路径指定脚本位置:
- 相对路径(在脚本所在目录执行)(cd 转目录):
sh ./helloworld.sh bash ./helloworld.sh - 绝对路径(可以在任意目录执行):
sh /home/atguigu/shells/helloworld.sh bash /home/atguigu/shells/helloworld.sh
这种方式的本质是 bash 或 sh 解析器帮我们执行脚本,所以脚本本身不需要可执行权限。
第二种:需要执行权限(直接执行)
这种方式是直接执行脚本文件,需要先给脚本赋予可执行权限:
(可以看到什么图片中helloworld.sh 文件被加粗了)
- 赋予权限(此为linux基础命令):
chmod +x helloworld.sh - 执行脚本:
- 相对路径(在脚本所在目录执行):
./helloworld.sh - 绝对路径(可以在任意目录执行):
/home/atguigu/shells/helloworld.sh
- 相对路径(在脚本所在目录执行):
这种方式的本质是脚本自己执行,所以必须要有可执行权限。
第三种:使用 source 或 .(当前 shell 执行)
使用 source 命令或 .(点号)执行脚本,脚本会在当前 Shell 环境中执行,而不是创建一个新的子 Shell 环境。这会导致脚本中定义的变量在脚本执行后仍然有效。
例如,有一个 test.sh 脚本:
cat test.sh
内容如下:
#!/bin/bash
A=5
echo $A
分别用不同方式执行:
bash test.sh
sh test.sh
./test.sh
. test.sh # 或 source test.sh
echo $A # 只有 source 执行才能打印 5
前三种方式(bash、sh、直接执行)都会创建子 Shell 来执行脚本,脚本执行结束后子 Shell 关闭,在子 Shell 中定义的变量不会影响父 Shell;而使用 source 或 . 执行脚本时,脚本在当前 Shell 中执行,变量会保留在当前 Shell 中。
第 3 章:变量
在 Shell 中,变量是存储数据的容器,我们可以通过变量名来访问存储的数据。Shell 中的变量分为系统预定义变量、自定义变量和特殊变量。
3.1 系统变量示例
系统预定义变量是系统自带的变量,用于存储系统相关的信息。常见的系统变量有:
$HOME:当前用户的家目录$PWD:当前工作目录$SHELL:当前默认的 Shell 解析器$USER:当前登录的用户
可以通过 echo 命令查看这些变量的值:
echo $HOME
echo $PWD
echo $SHELL
echo $USER
使用 set 命令可以显示当前 Shell 中的所有变量:
set
这些系统变量为我们获取系统信息提供了方便。
3.2 自定义变量
除了系统预定义变量,我们还可以自己定义变量来存储数据。
定义和使用变量
定义变量的基本格式是:变量名=变量值,注意等号前后不能有空格。使用变量时,在变量名前加 $ 符号。
A=5
echo $A # 输出 5
重新赋值和撤销变量
可以对已定义的变量重新赋值:
A=8
echo $A # 输出 8
使用 unset 命令可以撤销变量:
unset A
echo $A # 变量 A 已被撤销,无输出
只读变量
使用 readonly 命令可以定义只读变量,只读变量不能被重新赋值,也不能被撤销:
readonly B=2
echo $B # 输出 2
B=9 # 报错:readonly variable
变量的类型
在 bash 中,变量默认都是字符串类型,即使看起来是数字,也不能直接进行数值运算:
C=1+2
echo $C # 输出:1+2,而不是 3
如果变量的值包含空格,需要使用双引号或单引号将其括起来:
D=I love banzhang # 错误,会被解析为多个命令
D="I love banzhang" # 正确
echo $D # 输出:I love banzhang
设置全局变量(供脚本调用)
默认情况下,自定义变量只在当前 Shell 中有效,在子 Shell 或脚本中无法访问。如果要让变量在子 Shell 或脚本中也能使用,需要使用 export 命令将其提升为全局变量:
export B
例如,我们在 helloworld.sh 脚本中添加输出变量 B 的语句:
vim helloworld.sh
内容添加:
#!/bin/bash
echo "helloworld"
echo $B
运行脚本:
./helloworld.sh
如果没有执行 export B 命令,脚本中不会输出变量 B 的值;执行 export B 后重新执行脚本,就可以输出 B 的值了。
3.3 特殊变量
特殊变量是 Shell 中具有特殊含义的变量,用于处理命令行参数、命令执行状态等。
$n、$#
$n:用于获取命令行参数,$0代表脚本名称,$1到$9代表第 1 到第 9 个参数,10 及以上的参数需要用${10}表示。$#:用于获取命令行参数的个数。
示例:
vim parameter.sh
内容:
#!/bin/bash
echo '==========$n=========='
echo $0 # 脚本名称
echo $1 # 第一个参数
echo $2 # 第二个参数
echo '==========$#=========='
echo $# # 参数个数
执行:
chmod 777 parameter.sh
./parameter.sh cls xz
输出:
==========$n==========
./parameter.sh
cls
xz
==========$#==========
2
可以看到,$0 输出了脚本名称 ./parameter.sh,$1 输出了第一个参数 cls,$2 输出了第二个参数 xz,$# 输出了参数的个数 2。
$* 和 $@
$* 和 $@ 都用于获取所有命令行参数,但它们在处理参数的方式上有所不同:
$*:将所有参数视为一个整体。$@:将每个参数视为独立的个体。
示例:
vim parameter.sh
追加内容:
echo '==========$*=========='
echo $*
echo '==========$@=========='
echo $@
执行:
./parameter.sh a b c d e f g
输出:
==========$*==========
a b c d e f g
==========$@==========
a b c d e f g
从表面上看,$* 和 $@ 的输出结果相同,但在循环中它们的表现不同。我们可以通过一个循环示例来观察:
vim for4.sh
#!/bin/bash
echo '=============$*============='
for i in "$*"
doecho "ban zhang love $i"
doneecho '=============$@============='
for j in "$@"
doecho "ban zhang love $j"
done
执行:
chmod 777 for4.sh
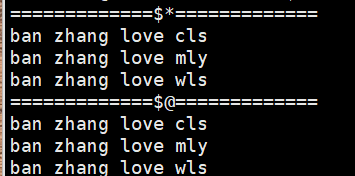
./for4.sh cls mly wls
输出:
=============$*=============
ban zhang love cls mly wls
=============$@=============
ban zhang love cls
ban zhang love mly
ban zhang love wls
可以看到,"$*" 被当作一个整体进行循环,只循环一次;而 "$@" 被当作多个独立的参数,循环次数与参数个数相同。
$?
$? 用于获取上一个命令执行的返回状态。如果返回值为 0,表示上一个命令执行成功;如果返回值为非 0,则表示上一个命令执行失败。
例如,判断 helloworld.sh 脚本是否正确执行:
./helloworld.sh
echo $? # 输出 0,说明执行成功
这在脚本中用于判断命令是否执行成功非常有用。
第 4 章:运算符
在 Shell 中进行数值运算时,不能直接使用 +、-、*、/ 等运算符,需要使用特定的格式。
Shell 中常用的数值运算格式有两种:
$((运算式))$[运算式]
例如,计算 (2+3)*4 的值:
S=$[(2+3)*4]
echo $S # 输出 20
或者:
S=$(( (2+3)*4 ))
echo $S # 输出 20
这两种格式都可以实现数值运算,使用起来比较方便。
第 5 章:条件判断
在 Shell 中,条件判断用于根据不同的条件执行不同的操作。
5.1 条件判断的基本语法
Shell 中条件判断有两种基本语法:
test condition[ condition ](condition前后要有空格)
如果条件成立,返回 0(表示真);条件不成立,返回非 0(表示假)。需要注意的是,条件非空即为真,[ atguigu ] 返回真,[ ] 返回假。
5.2 常用判断条件及示例
数值比较
用于两个整数之间的比较,常用的运算符有:
-eq:等于-ne:不等于-lt:小于-gt:大于-le:小于等于-ge:大于等于
示例:判断 23 是否大于等于 22
[ 23 -ge 22 ]
echo $? # 输出 0,表示条件成立
文件权限判断
用于判断文件是否具有某种权限,常用的运算符有:
-r:有读权限-w:有写权限-x:有执行权限
示例:判断 helloworld.sh 是否具有写权限
[ -w helloworld.sh ]
echo $? # 输出 0,表示有写权限
文件存在性判断
用于判断文件或目录是否存在,常用的运算符有:
-e:文件或目录存在-f:文件存在且是普通文件-d:文件存在且是目录
示例:判断 /home/atguigu/cls.txt 是否存在
[ -e /home/atguigu/cls.txt ]
echo $? # 如果文件不存在,输出非 0
多条件判断
可以使用 && 和 || 进行多条件判断:
&&:表示前一条命令执行成功时,才执行后一条命令||:表示前一条命令执行失败时,才执行后一条命令
示例:
[ atguigu ] && echo OK || echo notOK # 输出 OK,因为条件非空为真
[ ] && echo OK || echo notOK # 输出 notOK,因为条件为空为假
这在脚本中用于复杂的条件判断非常有用。
第 6 章:流程控制
流程控制用于根据不同的条件执行不同的代码块,或重复执行某个代码块。Shell 中的流程控制包括 if 判断、case 语句、for 循环和 while 循环。
6.1 if 判断
if 判断用于根据条件执行不同的代码块,分为单分支和多分支两种形式。
语法格式
-
单分支:
if [ 条件判断式 ]; then程序 fi或者
if [ 条件判断式 ] then程序 fi -
多分支:
if [ 条件判断式 ]; then程序 elif [ 条件判断式 ]; then程序 else程序 fi
注意事项:
[ 条件判断式 ]中,中括号和条件判断式之间必须有空格if后要有空格
示例
例如,输入数字 1 输出特定内容,输入数字 2 输出另一内容:
vim if.sh
($1为第一个带入的参数)
#!/bin/bash
if [ $1 -eq 1 ]; thenecho "banzhang zhen shuai"
elif [ $1 -eq 2 ]; thenecho "cls zhen mei"
fi
chmod 777 if.sh
./if.sh 1 # 输出 banzhang zhen shuai
6.2 case 语句
case 语句用于多分支判断,根据变量的不同取值执行不同的代码块。
语法格式
case $变量名 in
"值1")如果变量的值等于值1,则执行此程序;;
"值2")如果变量的值等于值2,则执行此程序;;
...省略其他分支...
*)如果变量的值都不是以上的值,则执行此程序;;
esac
注意事项:
- case 行尾必须为单词 “in”
- 每一个模式匹配必须以右括号 “)” 结束
- 双分号 “;;” 表示命令序列结束,相当于 Java 中的 break
- 最后的 “*)” 表示默认模式,相当于 Java 中的 default
示例
例如,输入数字 1 输出 "banzhang",输入数字 2 输出 "cls",输入其他数字输出 "renyao":
vim case.sh
#!/bin/bash
case $1 in
"1")echo "banzhang";;
"2")echo "cls";;
*)echo "renyao";;
esac
chmod 777 case.sh
./case.sh 1 # 输出 banzhang
6.3 for 循环
for 循环用于重复执行某个代码块,有两种语法格式。
C 语言风格
语法格式:
for ((初始值; 循环控制条件; 变量变化)); do程序
done
示例:计算 1 到 100 的和
vim for1.sh
#!/bin/bash
sum=0
for((i=0;i<=100;i++))
dosum=$[$sum+$i]
done
echo $sum # 输出 5050
chmod 777 for1.sh
./for1.sh
列表模式
语法格式:
for 变量 in 值1 值2 ...; do程序
done
示例:遍历输出列表中的元素
vim for2.sh
#!/bin/bash
for i in cls mly wls
doecho "ban zhang love $i"
done
chmod 777 for2.sh
./for2.sh
输出:
ban zhang love cls
ban zhang love mly
ban zhang love wls
对比 $* 和 $@
前面我们已经介绍了 $* 和 $@ 的区别,这里通过循环进一步展示:
vim for3.sh
#!/bin/bash
echo '=============$*============='
for i in $*
doecho "ban zhang love $i"
doneecho '=============$@============='
for j in $@
doecho "ban zhang love $j"
done
执行:
chmod 777 for3.sh
./for3.sh cls mly wls
当不使用双引号时,$* 和 $@ 的输出完全一致。
再测试双引号版本:
vim for4.sh
#!/bin/bash
echo '=============$*============='
for i in "$*"
doecho "ban zhang love $i"
doneecho '=============$@============='
for j in "$@"
doecho "ban zhang love $j"
done
执行:
chmod 777 for4.sh
./for4.sh cls mly wls
输出:
=============$*=============
ban zhang love cls mly wls
=============$@=============
ban zhang love cls
ban zhang love mly
ban zhang love wls
可以更清楚地看到 $* 和 $@ 的区别:"$*" 将所有参数视为一个整体,"$@" 将每个参数视为独立个体。
6.4 while 循环
while 循环用于在条件成立时重复执行某个代码块。
语法格式:
while [ 条件判断式 ]; do程序
done
示例:计算 1 到 100 的和
vim while.sh
#!/bin/bash
sum=0
i=1
while [ $i -le 100 ]
dosum=$[$sum+$i]i=$[$i+1]
done
echo $sum # 输出 5050
chmod 777 while.sh
./while.sh
第 7 章:输入内容到控制台(read 读取)
read 命令用于从控制台读取用户输入,并将输入的值赋给变量。
7.1 read 命令基本语法
read -t 秒数 -p "提示信息" 变量名
选项说明:
-p:指定读取输入时的提示信息-t:指定等待输入的时间(单位:秒),如果超过指定时间没有输入,read命令会退出- 默认情况下,
read命令会无限等待用户输入
示例:等待 7 秒输入姓名
文件:read.sh
-
创建并编辑脚本:
touch read.sh vim read.sh -
输入以下内容:
#!/bin/bash read -t 7 -p "Enter your name in 7 seconds :" NN echo $NN
执行:
chmod +x read.sh
./read.sh
输出示例:
Enter your name in 7 seconds : atguigu # 在 7 秒内输入姓名
atguigu # 输出输入的姓名
(自己输入啊,记得自己输进去啊,别干等着)
如果在 7 秒内没有输入,脚本会继续执行,echo $NN 不会输出任何内容。
第 8 章:函数
函数是一段可以重复调用的代码块,用于实现特定的功能。Shell 中的函数分为系统函数和自定义函数。
8.1 系统函数
系统函数是系统自带的函数,可以直接使用。
8.1.1 basename:提取文件名
basename 命令用于从路径中提取文件名,语法格式:
basename [string / pathname] [suffix]
suffix为后缀,如果指定了suffix,basename会将文件名中的suffix去掉。
示例:
basename /home/atguigu/banzhang.txt # 输出 banzhang.txt
basename /home/atguigu/banzhang.txt .txt # 输出 banzhang
basename 可以理解为取路径里的文件名称。
8.1.2 dirname:提取目录路径
dirname 命令用于从路径中提取目录部分,语法格式:
dirname 文件绝对路径
示例:
dirname /home/atguigu/banzhang.txt # 输出 /home/atguigu
dirname 可以理解为取文件路径的绝对路径名称。
8.2 自定义函数
除了系统函数,我们还可以自己定义函数来实现特定的功能。
语法格式
function 函数名() {语句[ return 整数 ]
}
注意事项:
- Shell 函数必须先定义再调用,因为 Shell 脚本是逐行执行的,不会像其他语言一样先编译
- 函数的返回值只能通过
$?系统变量获取,可以使用return语句指定返回值,如果不使用return语句,函数会以最后一条命令的执行结果作为返回值,返回值的范围是 0 到 255
示例:两个数求和
-
创建并编辑脚本:
touch fun.sh vim fun.sh -
输入以下内容:
#!/bin/bashfunction sum() {s=0s=$[$1 + $2]echo "$s" }read -p "Please input the number1: " n1 read -p "Please input the number2: " n2 sum $n1 $n2 -
执行脚本:
chmod +x fun.sh ./fun.sh -
输出示例:
Please input the number1: 2 Please input the number2: 5 7
第 9 章:正则表达式入门
正则表达式是一种用于描述字符串模式的工具,它可以用来匹配、检索和替换符合特定模式的字符串。在 Linux 中,grep、sed、awk 等文本处理工具都支持正则表达式。
9.1 常规匹配
一串不包含特殊字符的正则表达式会匹配它自己。例如,要在 /etc/passwd 文件中查找包含 atguigu 的行,可以使用:
cat /etc/passwd | grep atguigu
这个命令会匹配所有包含 atguigu 字符串的行。
9.2 常用特殊字符
1)^:行首匹配
^ 用于匹配一行的开头。例如,要在 /etc/passwd 文件中查找以 a 开头的行:
cat /etc/passwd | grep ^a
这个命令会匹配所有以 a 开头的行。
2)$:行尾匹配
$ 用于匹配一行的结尾。例如,要在 /etc/passwd 文件中查找以 t 结尾的行
cat /etc/passwd | grep t$
这个命令会匹配所有以 t 结尾的行🔷1-297🔷。
思考:
^$匹配什么?
^$匹配空行,因为^表示行首,$表示行尾,行首和行尾之间没有任何字符,就是空行。
3).:匹配任意一个字符
. 用于匹配任意一个字符(除了换行符)。例如,要在 /etc/passwd 文件中查找包含 r 开头、t 结尾,中间有两个任意字符的行:
cat /etc/passwd | grep r..t
这个命令会匹配包含 root、rabt 等形式的行。
4)*:上一个字符重复 0 次或多次
* 不能单独使用,它需要和上一个字符连用,表示匹配上一个字符 0 次或多次。例如,要在 /etc/passwd 文件中查找包含 ro*t 的行:
cat /etc/passwd | grep ro*t
这个命令会匹配包含 rt、rot、root、rooooot 等形式的行。
思考:
.*匹配什么?
.*表示匹配任意长度的任意字符(除了换行符),因为.匹配任意一个字符,*表示上一个字符(即.)重复 0 次或多次。
5)[]:字符集合
[] 表示匹配某个范围内的一个字符。例如:
[6,8]:匹配 6 或者 8[0-9]:匹配一个 0 到 9 的数字[0-9]*:匹配任意长度的数字字符串[a-z]:匹配一个 a 到 z 之间的小写字母[a-z]*:匹配任意长度的小写字母字符串[a-c, e-f]:匹配 a 到 c 或者 e 到 f 之间的任意字符
示例:
cat /etc/passwd | grep r[a,b,c]*t
这个命令会匹配包含 rt、rat、rbt、rabt 等形式的行。
6)\:转义字符
\ 用于转义特殊字符,使其失去特殊含义,仅表示字符本身。由于很多特殊字符在 Shell 中有特定的含义,当我们想匹配这些特殊字符本身时,需要使用 \ 进行转义。例如,要匹配包含 a$b 的行:
cat /etc/passwd | grep 'a\$b'
注意需要使用单引号将正则表达式引起来,防止 $ 被 Shell 解释为变量引用。
第 10 章:文本处理工具
文本处理工具用于对文本文件进行切割、分析、提取等操作,在 Shell 脚本中经常用到。
10.1 cut 命令
cut 命令的作用是从文件的每一行中切割出指定的字节、字符或字段,并将其输出。
1)基本语法:
cut [选项] 文件名
cut 命令的默认分隔符是制表符(\t)。
2)选项说明:
| 选项 | 功能 |
|---|---|
-f | 用于指定要提取的列号,例如 -f 1 表示提取第 1 列 |
-d | 用于指定分隔符,默认是制表符,例如 -d " " 表示使用空格作为分隔符 |
-c | 按字符进行切割,后面跟数字表示取第几个字符,例如 -c 1 表示取第 1 个字符 |
示例 1:准备数据
创建 cut.txt 文件并输入以下内容:
touch cut.txt
vim cut.txt
内容:
dong shen
guan zhen
wo wo
lai lai
le le
示例 2:提取第一列
使用空格作为分隔符,提取第 1 列:
cut -d " " -f 1 cut.txt
输出:
dong
guan
wo
lai
le
示例 3:提取第 2、3 列
使用空格作为分隔符,提取第 2 列和第 3 列:
cut -d " " -f 2,3 cut.txt
输出:
shen
zhen
wo
lai
le
示例 4:查找 guan 并切出
先使用 grep 命令查找包含 guan 的行,再使用 cut 命令提取第 1 列:
cat cut.txt | grep guan | cut -d " " -f 1
输出:
guan
示例 5:PATH 从第 3 个目录起截取
PATH 环境变量存储了系统的命令搜索路径,各路径之间用冒号(:)分隔。要从第 3 个路径开始截取:
echo $PATH | cut -d ":" -f 3-
-f 3- 表示从第 3 列开始提取,直到最后一列。
示例 6:提取 IP 地址
可以结合 ifconfig、grep 和 cut 命令提取 IP 地址:
ifconfig ens33 | grep netmask | cut -d " " -f 10
这个命令的作用是:先通过 ifconfig ens33 获取网卡 ens33 的信息,然后使用 grep netmask 过滤出包含 netmask 的行(通常这一行包含 IP 地址),最后使用 cut 命令以空格为分隔符提取第 10 列,即 IP 地址。
10.2 awk 命令
awk 是一个强大的文本分析工具,它将文件逐行读入,以空格为默认分隔符将每行切割成多个字段,然后对这些字段进行分析处理。
1)基本语法:
awk -F 分隔符 '/模式/{动作}' 文件
模式(pattern):表示awk要在数据中查找的内容动作(action):表示当找到匹配的模式时要执行的命令
2)选项说明:
| 选项 | 功能 |
|---|---|
-F | 指定输入文件的分隔符 |
-v | 赋值一个用户定义变量 |
示例 1:准备 passwd
将 /etc/passwd 文件复制到当前目录,用于测试:
sudo cp /etc/passwd ./
passwd 文件中每一行的格式为:用户名:密码(加密): 用户 ID: 组 ID: 注释:用户家目录:Shell 解析器。
示例 2:匹配 root 并输出第 7 列
使用 : 作为分隔符,查找以 root 开头的行,并输出第 7 列(Shell 解析器):
awk -F : '/^root/{print $7}' passwd
输出:
/bin/bash
示例 3:输出第 1 和第 7 列(用逗号分隔)
使用 : 作为分隔符,查找以 root 开头的行,并输出第 1 列(用户名)和第 7 列(Shell 解析器),中间用逗号分隔:
awk -F : '/^root/{print $1","$7}' passwd
输出:
root,/bin/bash
示例 4:添加列名与尾行
使用 BEGIN 和 END 关键字可以在处理文件内容之前和之后执行指定的动作:
BEGIN:在读取任何数据行之前执行END:在处理完所有数据行之后执行
示例:给 passwd 文件的第 1 列和第 7 列添加列名,并在最后添加一行自定义内容:
awk -F : 'BEGIN{print "user, shell"} {print $1","$7} END{print "dahaige,/bin/zuishuai"}' passwd
输出中,BEGIN 块输出的内容会在文件内容之前显示,END 块输出的内容会在文件内容之后显示。
示例 5:将 UID +1 输出
使用 -v 选项定义变量 i=1,然后将 passwd 文件中第 3 列(用户 ID)的值加 1 并输出:
awk -v i=1 -F : '{print $3+i}' passwd
示例 6:使用内置变量
awk 有一些内置变量,用于获取文件相关的信息:
| 变量 | 说明 |
|---|---|
FILENAME | 当前处理的文件名 |
NR | 已读取的记录数(行号) |
NF | 当前记录的字段个数(切割后列的个数) |
示例:统计 passwd 文件的文件名、每行的行号和每行的列数:
awk -F : '{print "filename:" FILENAME ",linenum:" NR ",col:" NF}' passwd
示例 7:查找空行行号
查找 ifconfig 命令输出结果中的空行,并打印空行的行号:
ifconfig | awk '/^$/{print NR}'
/^$/ 是一个正则表达式,表示匹配空行,NR 变量表示当前行的行号。
示例 8:提取 IP 地址
结合 ifconfig 命令和 awk 提取 IP 地址:
ifconfig ens33 | awk '/netmask/ {print $2}'
这个命令的作用是:先获取网卡 ens33 的信息,然后过滤出包含 netmask 的行,最后输出该行的第 2 个字段,即 IP 地址。
第 11 章:综合应用案例
综合应用案例将前面所学的知识结合起来,实现实际的功能。
11.1 归档脚本
该脚本的功能是每天对指定的目录进行归档备份,将目录下的所有文件按天归档保存,并将归档文件放在 /root/archive 目录下,归档文件的名称格式为 archive_目录名_日期.tar.gz。
使用 tar 命令进行归档,-c 选项表示归档,-z 选项表示同时进行压缩,得到的文件后缀名为 .tar.gz。
脚本内容如下:
#!/bin/bash# 首先判断输入参数个数是否为 1
if [ $# -ne 1 ]
thenecho "参数个数错误!应该输入一个参数,作为归档目录名"exit
fi# 从参数中获取目录名称
if [ -d $1 ]
thenecho
elseechoecho "目录不存在!"echoexit
fiDIR_NAME=$(basename $1)
DIR_PATH=$(cd $(dirname $1); pwd)# 获取当前日期
DATE=$(date +%y%m%d)# 定义生成的归档文件名称
FILE=archive_${DIR_NAME}_$DATE.tar.gz# 定义归档文件的保存路径
DEST=/root/archive/$FILE# 开始归档目录文件
echo "开始归档..."
echotar -czf $DEST $DIR_PATH/$DIR_NAMEif [ $? -eq 0 ]
thenechoecho "归档成功!"echo "归档文件为:$DEST"echo
elseecho "归档出现问题!"echo
fiexit
脚本说明:
- 首先判断输入参数的个数是否为 1,如果不是,提示错误并退出
- 判断输入的参数是否是一个存在的目录,如果不是,提示错误并退出
- 使用
basename命令获取目录的名称,使用cd和pwd命令获取目录的绝对路径 - 使用
date命令获取当前日期,格式为yyyymmdd - 定义归档文件的名称和保存路径
- 使用
tar命令进行归档压缩 - 根据
tar命令的执行结果(通过$?判断),提示归档成功或失败
11.2 向用户发送消息
该脚本的功能是向某个用户快速发送消息,需要检测用户是否登录在系统中、是否打开了消息功能,以及当前发送的消息是否为空。
利用 Linux 自带的 mesg 和 write 工具来发送消息。
脚本内容如下:
#!/bin/bash# 检查用户是否登录
login_user=$(who | grep -i -m 1 $1 | awk '{print $1}')
if [ -z $login_user ]
thenecho "$1 不在线!"echo "脚本退出.."exit
fi# 检查用户是否打开消息功能
is_allowed=$(who -T | grep -i -m 1 $1 | awk '{print $2}')
if [ $is_allowed != "+" ]
thenecho "$1 没有开启消息功能"echo "脚本退出.."exit
fi# 检查消息是否为空
if [ -z $2 ]
thenecho "没有消息发出"echo "脚本退出.."exit
fi# 提取消息内容和用户终端
whole_msg=$(echo $* | cut -d " " -f 2-)
user_terminal=$(who | grep -i -m 1 $1 | awk '{print $2}')# 发送消息
echo $whole_msg | write $login_user $user_terminalif [ $? != 0 ]
thenecho "发送失败!"
elseecho "发送成功!"
fiexit
脚本说明:
- 使用
who命令结合grep和awk检查指定的用户是否登录,如果用户不在线,提示错误并退出 - 使用
who -T命令检查用户是否打开了消息功能(+表示打开,-表示关闭),如果没有打开,提示错误并退出 - 检查消息内容是否为空,如果为空,提示错误并退出
- 提取消息内容(去掉第一个参数,即用户名)和用户登录的终端
- 使用
write命令向用户发送消息 - 根据
write命令的执行结果,提示发送成功或失败
✅ 总结与建议
通过本文的学习,你已经掌握了 Shell 的基本语法和常用工具的使用,包括:
| 分类 | 技能点 |
|---|---|
| 脚本基础 | shebang、执行方式、权限 |
| 变量 | 系统变量、自定义、只读 |
| 控制结构 | if、case、for、while |
| 输入输出 | read、echo |
| 运算与判断 | 算术、文件、逻辑 |
| 正则表达式 | ^ $ . * [] \ |
| 文本处理 | cut、awk |
| 函数 | 自定义函数与系统函数 |
| 实战案例 | 归档、消息发送 |