建设网站广州企业需要缴纳哪些税
目录
一、开通阿里云容器镜像服务
二、Git配置
三、去DockerHub找镜像
四、编写images.txt文件
五、演示
六、其他注意事项
最近一段时间 Docker 镜像一直是 Pull 不下来的状态,想直连 DockerHub 是几乎不可能的。更糟糕的是,很多原本可靠的国内镜像站,例如一些大厂和高校运营的,也陆续关停了,这对我们这些个人开发者和中小企业来说是挺难受的。之前,通过这些镜像站,我们可以快速、方便地获取所需的 Docker 镜像,现在这条路也不行了。感觉这次动作不小,以后想直接访问 DockerHub 是不可能了。所以我们得想办法搭建自己的私有镜像仓库
一、开通阿里云容器镜像服务
从阿里云官网找到容器镜像服务ACR

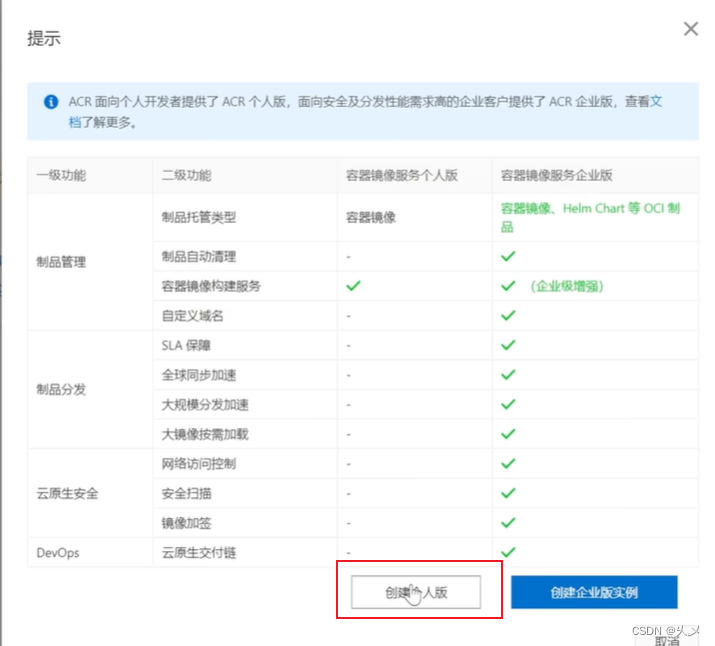
选择个人实例

点击创建个人版
点击设置登录密码

点击创建命名空间

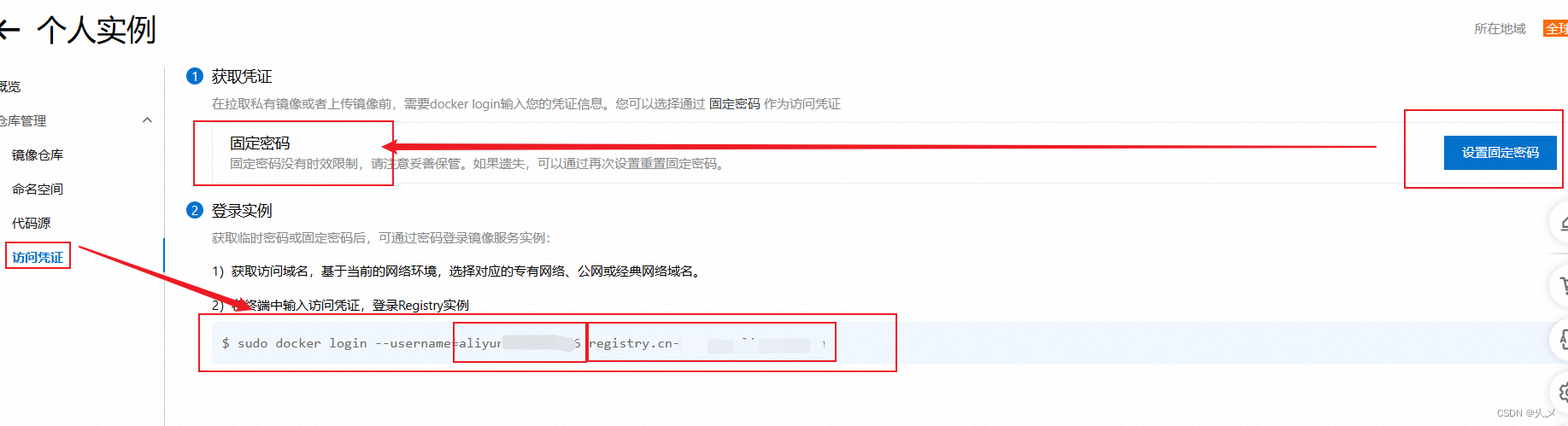
点击访问凭证,可以看到用户名,仓库地址,这个设置固定密码一定要设值,一般就是在输入一遍上面设置的密码,发个短信验证
二、Git配置
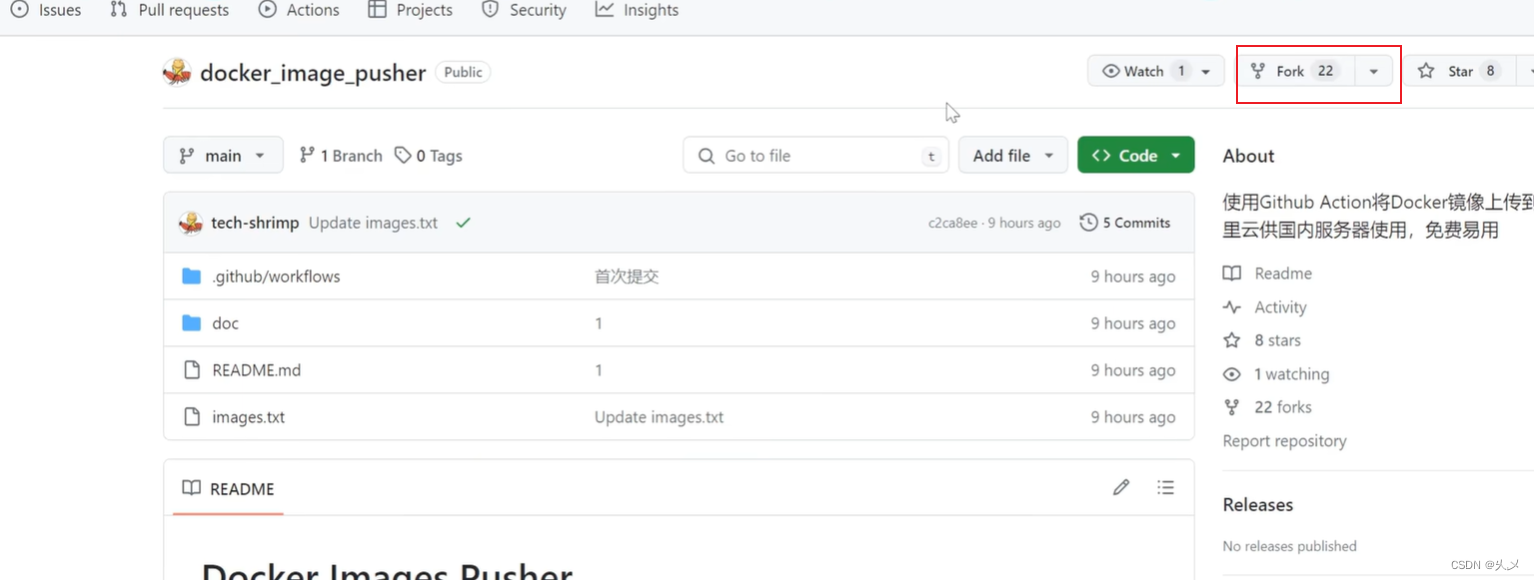
链接地址:https://github.com/tech-shrimp/docker_image_pusher
输入上述链接地址,点击fork,将项目拷贝到自己名下,直接点击create fork
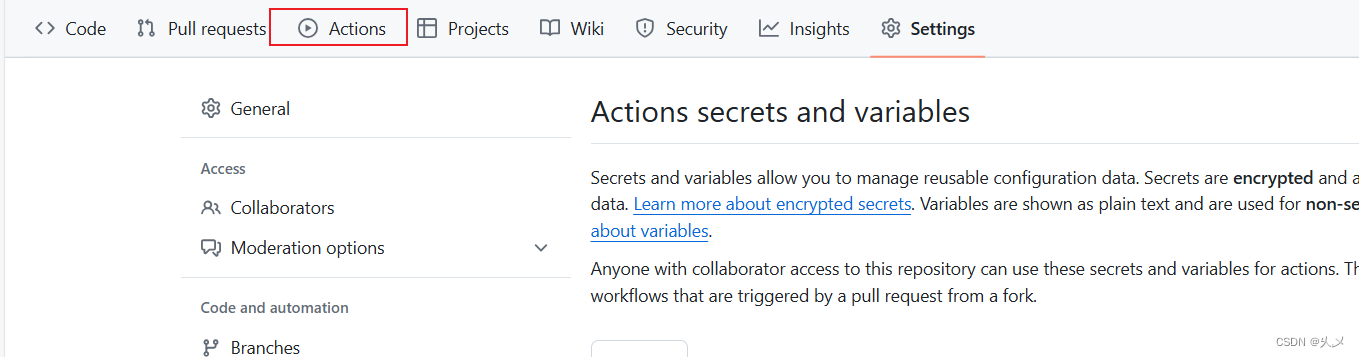
进入自己的项目,点击setting
点击Actions
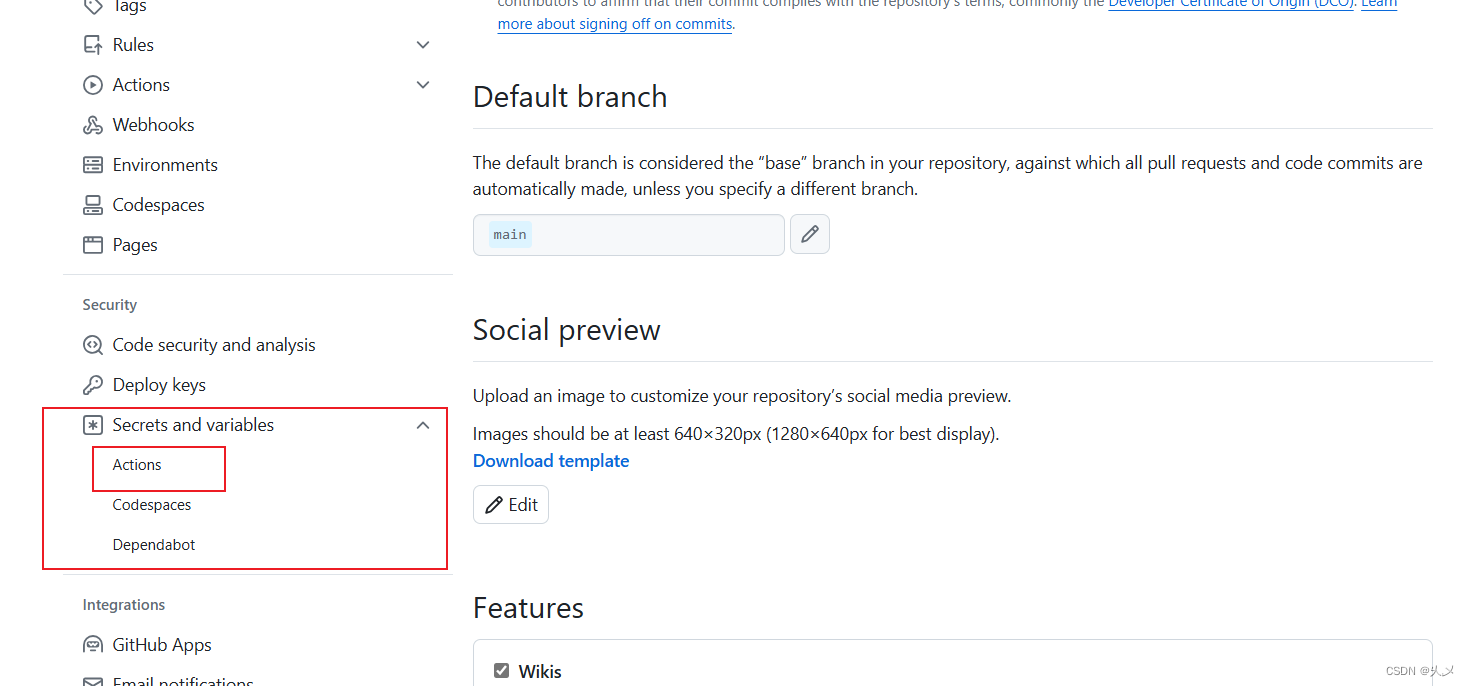
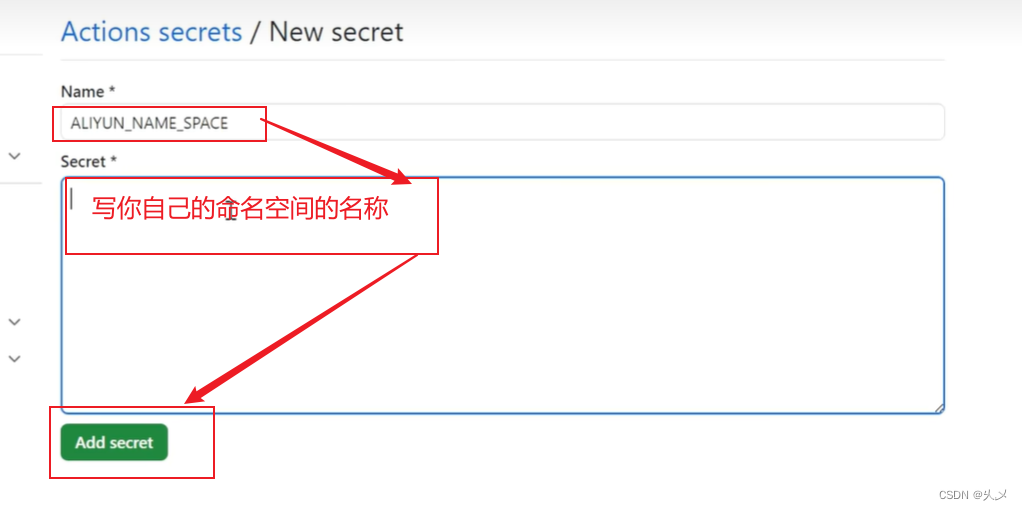
继续点击,然后添加四个环境变量
第一个是,阿里云命名空间(ALIYUN_NAME_SPACE)
第二个是,用户名(ALIYUN_REGISTRY_USER)
第三个是,密码(ALIYUN_REGISTRY_PASSWORD)
第四个是,仓库地址(ALIYUN_REGISTRY)
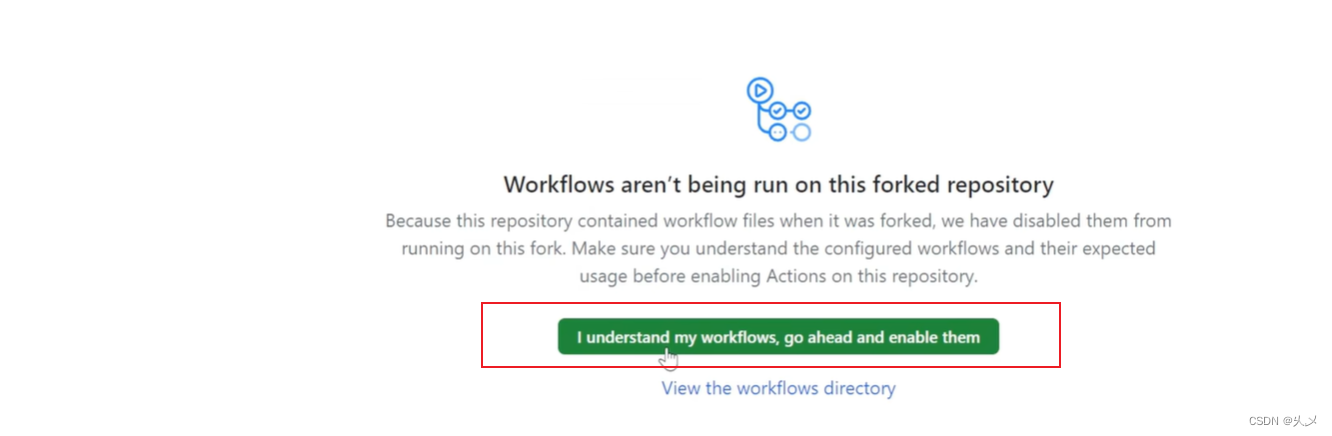
一次添加就行,添加完之后,点击Actions,然后点击绿色按钮
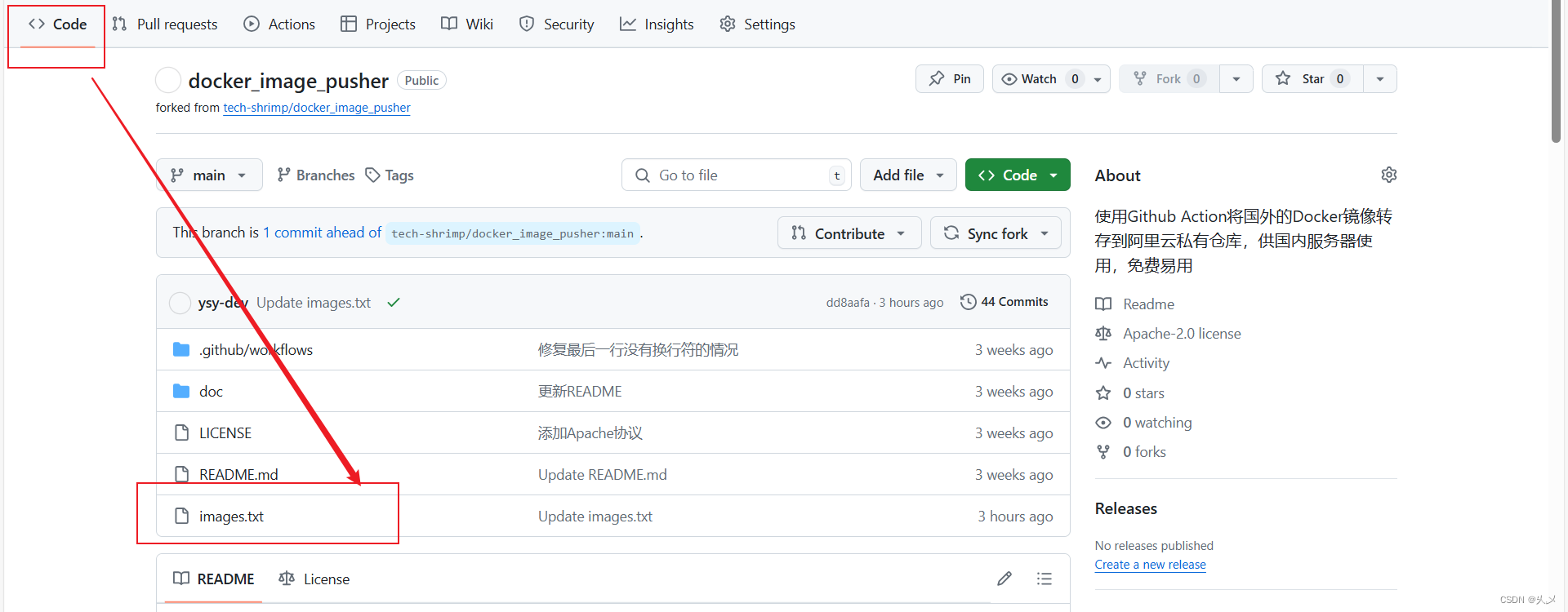
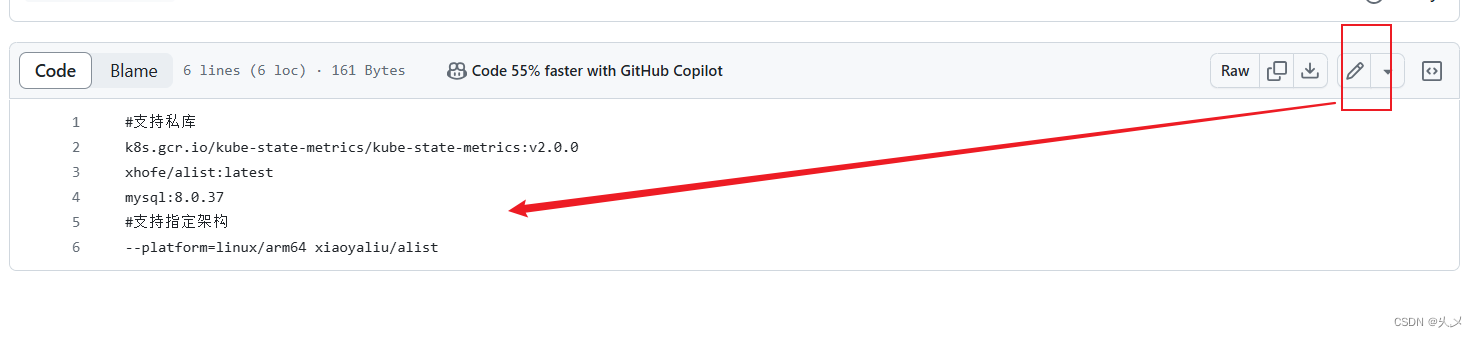
点击code代码这里,点击images.txt,进行编辑,点击右上角铅笔,想添加什么镜像,就把镜像添加到下面就可以了
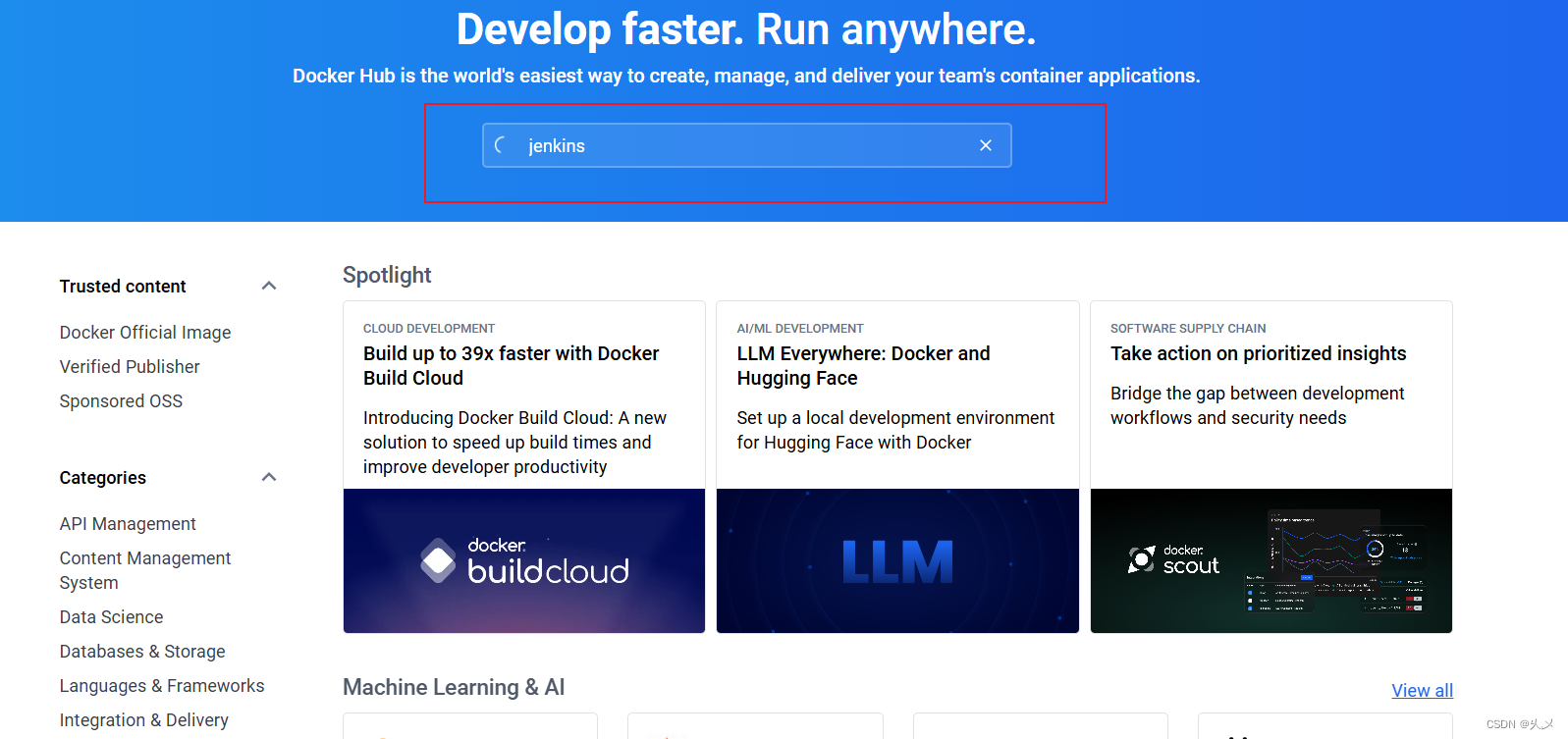
三、去DockerHub找镜像
链接地址:hub.docker.com
直接搜索就行,我以jenkins为例
就比如我想选择这一个,点击即可

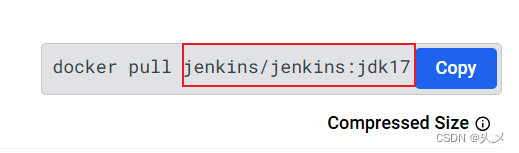
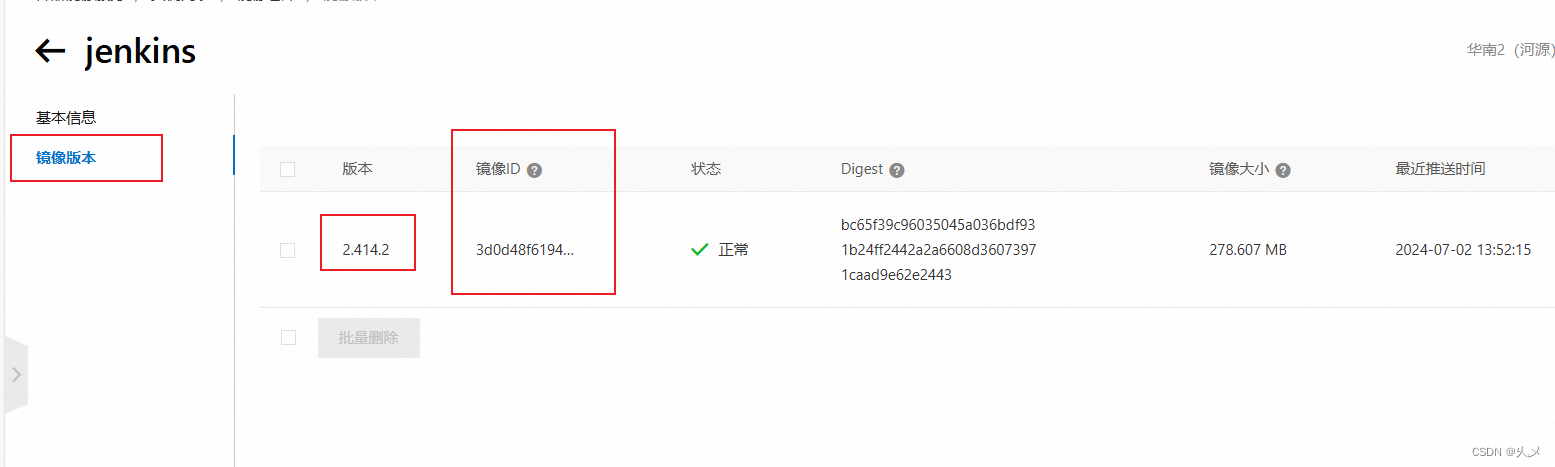
选择版本号
将这部分填写到images.txt文件里
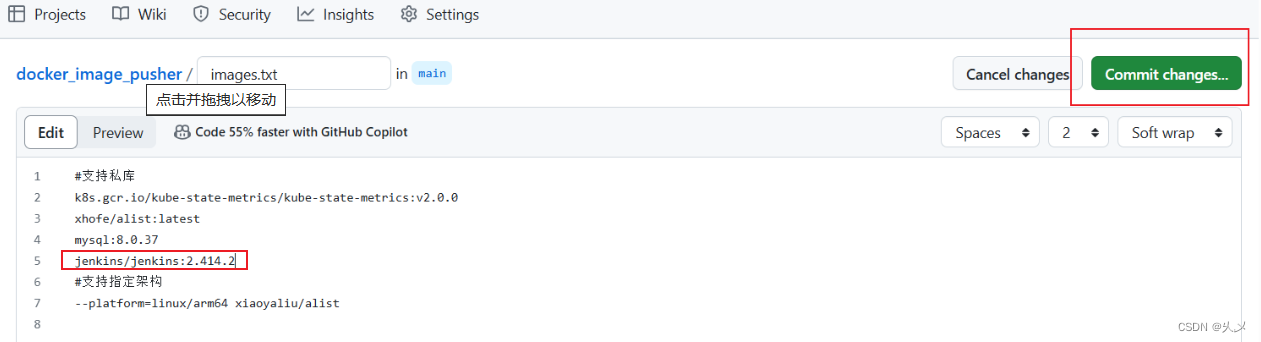
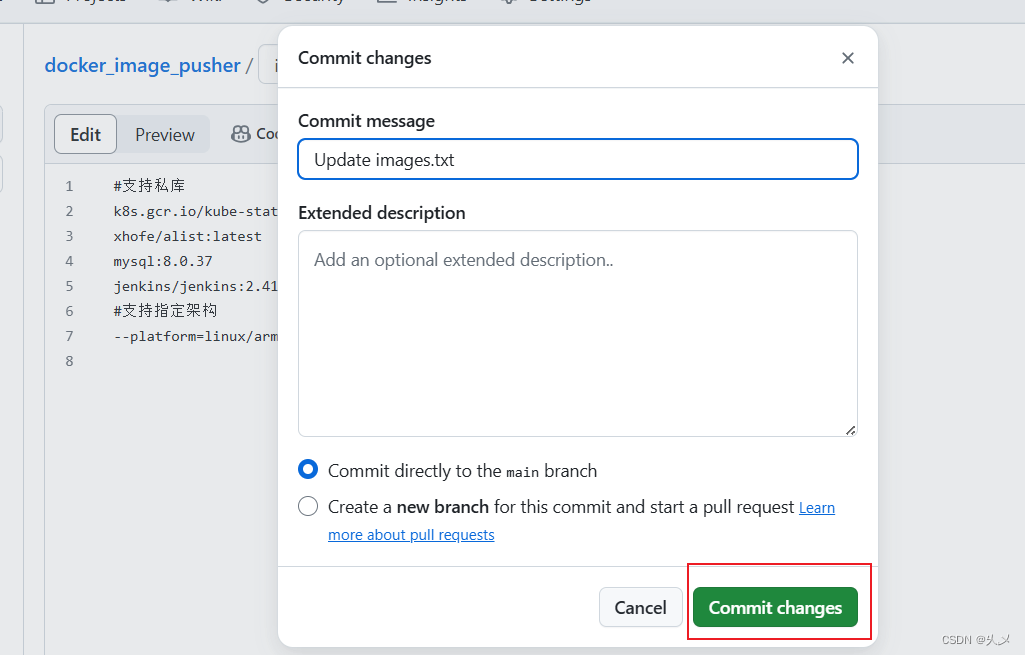
四、编写images.txt文件
写入,然后保存提交即可
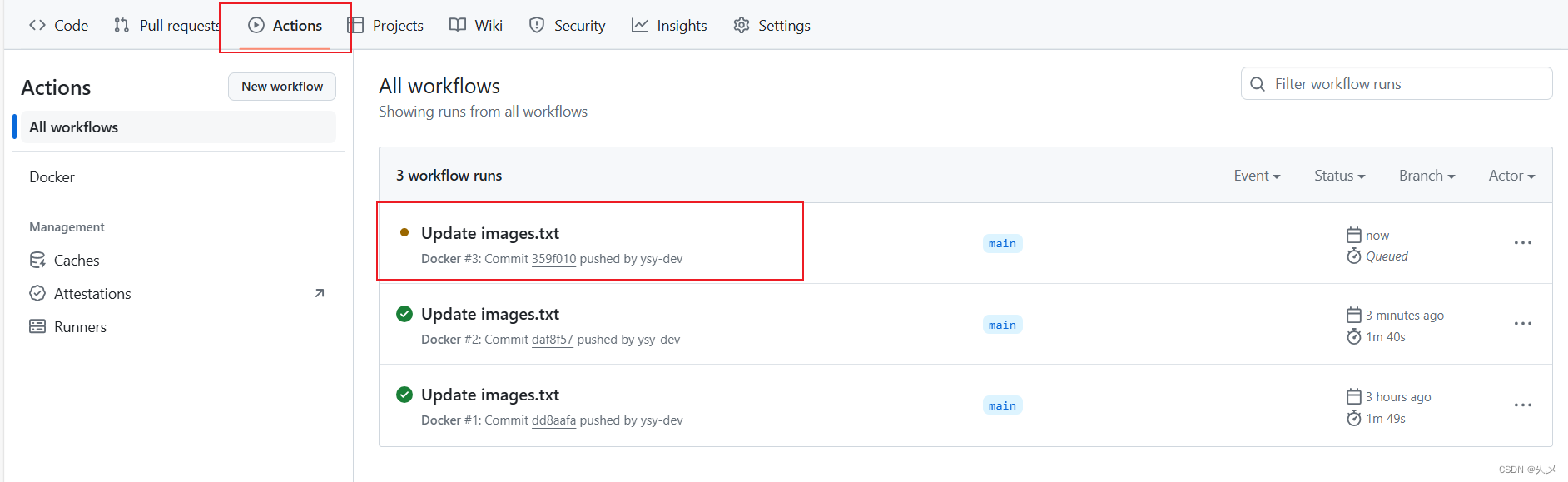
然后点击Actions,会发现构建已经开始了
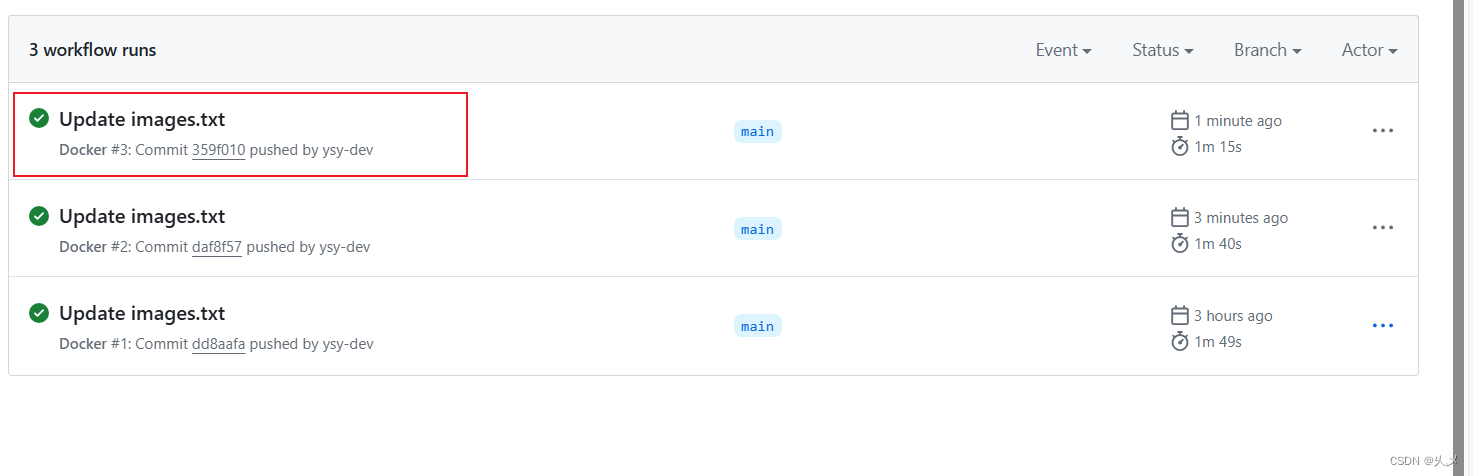
构建完成
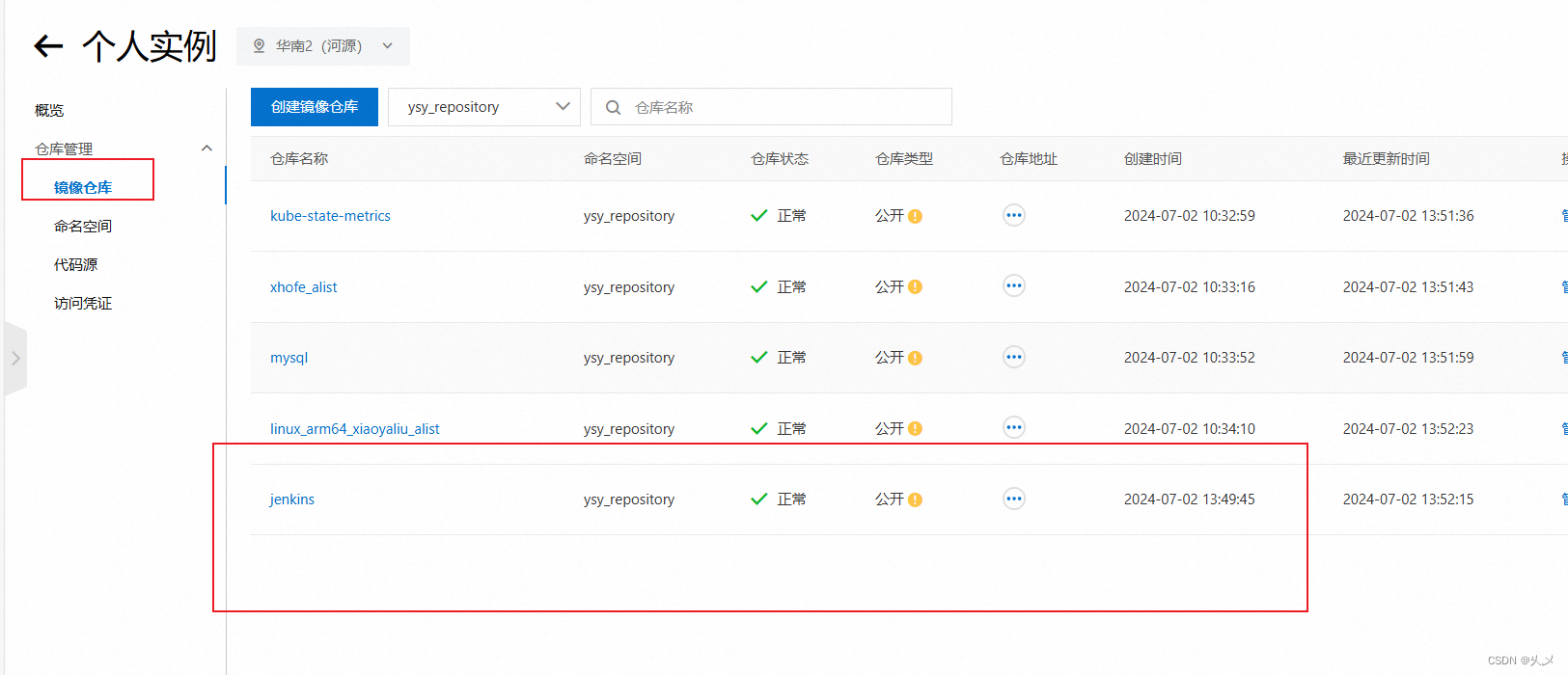
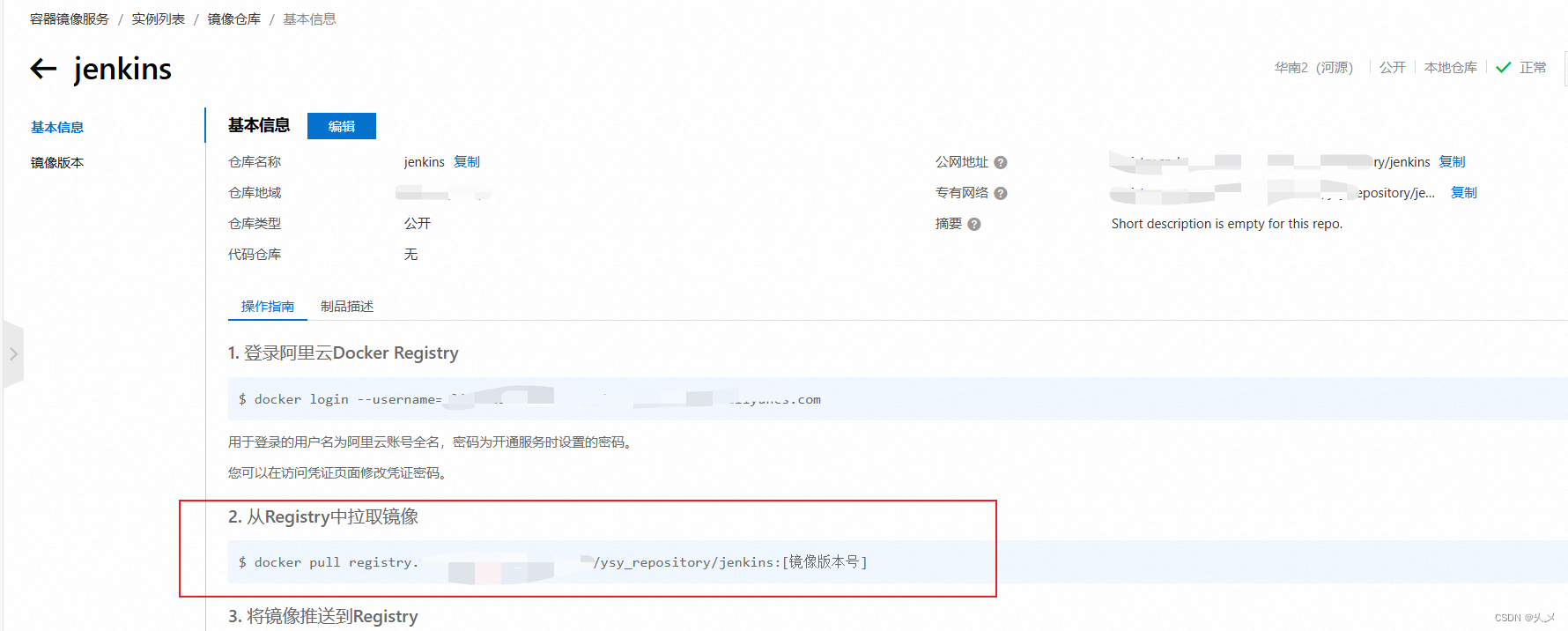
去阿里云镜像仓库查看,发现刚刚添加的jenkins已经添加进来了
点击查看详情,有各种命令,等会拉取镜像就是这个命令,还有一些版本号等等
五、演示
我找一个阿里云的服务器试一下,现在的话,只有一个mysql的镜像
![]()
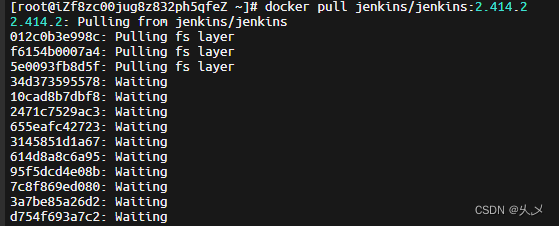
我先用正常的方式拉取镜像,会发现一直处于加载状态,一直拉取不下来
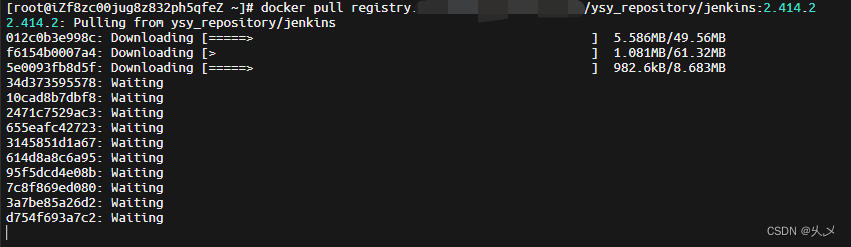
用这个新方式试一下,发现正在下载
六、其他注意事项
比如启动镜像容器时,也是要修改一下的

改成咱仓库的那个路径镜像就行
