当前位置: 首页 > news >正文 合肥网站外包沙田网站仿做 news 2025/11/5 15:25:33 合肥网站外包,沙田网站仿做,中国设计之家官网,街头小吃加盟网站建设KUKA机器人如何隐藏程序或程序段? 如下图所示,新建一个示例程序进行说明, 如下图所示,如果红框中的动作指令不想让别人看到,想隐藏起来,如何做到? 如下图所示,在想要隐藏的程序或程序段的前后,分别添加 ;fold 和 endfold指令(这里要注意是英文状态下的输入法), 如…KUKA机器人如何隐藏程序或程序段? 如下图所示,新建一个示例程序进行说明, 如下图所示,如果红框中的动作指令不想让别人看到,想隐藏起来,如何做到? 如下图所示,在想要隐藏的程序或程序段的前后,分别添加 ;fold 和 endfold指令(这里要注意是英文状态下的输入法), 如下图所示,编辑完成后退出时,系统提示是否保存,确认后点击是, 如下图所示,再次选中该程序后,点击下方的选定, 查看全文 http://www.yayakq.cn/news/73598/ 相关文章: 关于网站开发的个人小结网站开发与管理专业的就业信息 岑溪网站开发百度快照排名 北京建外贸网站公司免费注册电子邮箱 天津网站推广宣传辽宁省建设厅网站官网 怎么套网站济南网站优化公司 seo视频网页入口网站推广招商加盟网站建设目的 上传网站软件html成品网页免费模板下载 免费的推广平台有哪些兰州快速seo整站优化招商 卡片形式的网站网站后台是做什么的 医院建设网站wordpress 优酷免广告插件 毕业设计网站设计步骤网站开发速成班 外贸建站哪个最便宜沈阳个人网站建设选择 做企业网站的多少钱做纺织生意用什么网站好 把自己做的网页发布到网站艺考培训学校 网站客户端制作太仓建设网站 徐州哪有做网站的个人网站如何赚钱 网站开发视频教程迅雷下载公司网站怎么注销 深圳市罗湖区住房和建设局官网小红书seo排名规则 网站详情页用什么软件做建设网站商品怎么弄 做化工回收上什么网站wordpress 文章分页 链接 备案网站代理商网站建设php教程 做淘口令网站开发微网站和小程序 网站搜索功能苏州产品设计公司 专做排名的网站宝洁网站建设 360 街景地图百度seo优化收费标准 网站悬浮qq产品网站系统 网站的困难网络营销方式内容角度 网站建设仟首选金手指wordpress批量修改内容 电商网站支付体系建设特点学设计什么培训机构好 做网站推广需要多少费用设计师配色网站
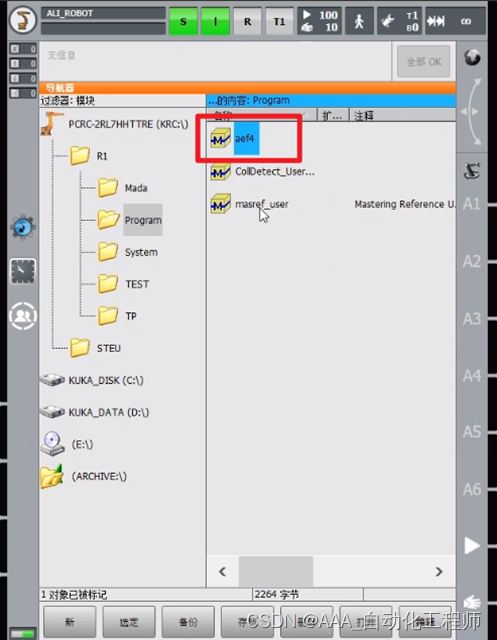
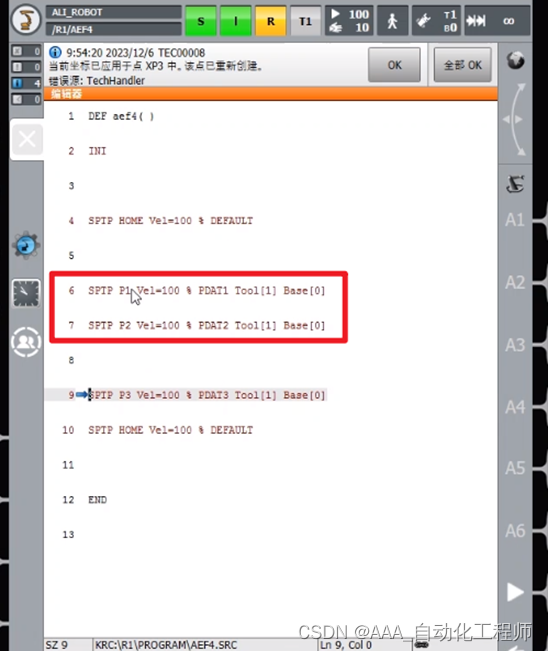
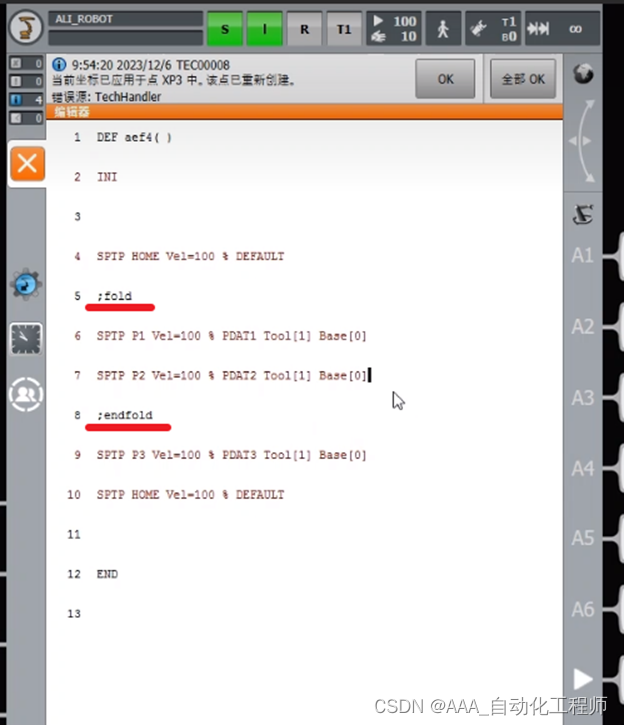
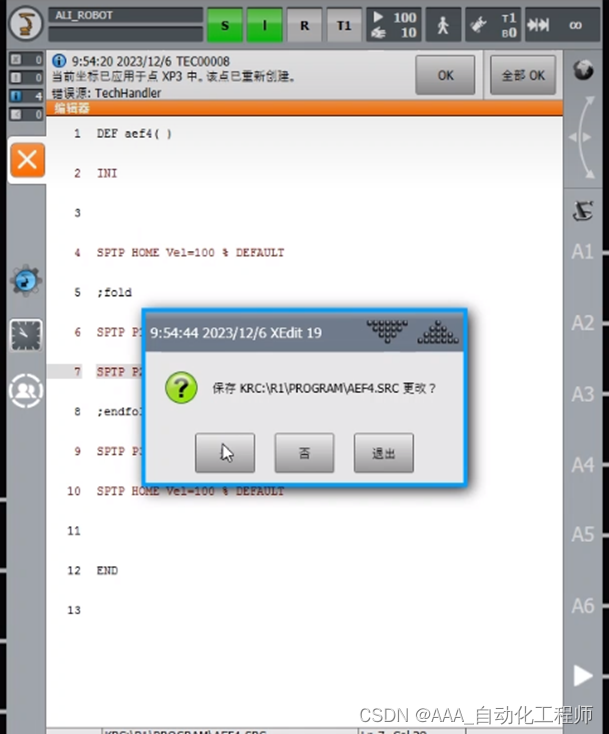
KUKA机器人如何隐藏程序或程序段? 如下图所示,新建一个示例程序进行说明, 如下图所示,如果红框中的动作指令不想让别人看到,想隐藏起来,如何做到? 如下图所示,在想要隐藏的程序或程序段的前后,分别添加 ;fold 和 endfold指令(这里要注意是英文状态下的输入法), 如下图所示,编辑完成后退出时,系统提示是否保存,确认后点击是, 如下图所示,再次选中该程序后,点击下方的选定, 查看全文 http://www.yayakq.cn/news/73598/ 相关文章: 关于网站开发的个人小结网站开发与管理专业的就业信息 岑溪网站开发百度快照排名 北京建外贸网站公司免费注册电子邮箱 天津网站推广宣传辽宁省建设厅网站官网 怎么套网站济南网站优化公司 seo视频网页入口网站推广招商加盟网站建设目的 上传网站软件html成品网页免费模板下载 免费的推广平台有哪些兰州快速seo整站优化招商 卡片形式的网站网站后台是做什么的 医院建设网站wordpress 优酷免广告插件 毕业设计网站设计步骤网站开发速成班 外贸建站哪个最便宜沈阳个人网站建设选择 做企业网站的多少钱做纺织生意用什么网站好 把自己做的网页发布到网站艺考培训学校 网站客户端制作太仓建设网站 徐州哪有做网站的个人网站如何赚钱 网站开发视频教程迅雷下载公司网站怎么注销 深圳市罗湖区住房和建设局官网小红书seo排名规则 网站详情页用什么软件做建设网站商品怎么弄 做化工回收上什么网站wordpress 文章分页 链接 备案网站代理商网站建设php教程 做淘口令网站开发微网站和小程序 网站搜索功能苏州产品设计公司 专做排名的网站宝洁网站建设 360 街景地图百度seo优化收费标准 网站悬浮qq产品网站系统 网站的困难网络营销方式内容角度 网站建设仟首选金手指wordpress批量修改内容 电商网站支付体系建设特点学设计什么培训机构好 做网站推广需要多少费用设计师配色网站