有什么做兼职的好的网站wordpress怎么引用single
在这个短视频盛行的时代,如何让我们的故事更生动有趣呢?那就要对短视频进行修饰了。这就需要借助视频剪辑工具:而一款好的工具不仅仅是视频的“美颜”,更是创意的灵魂所在!想象一下,运用一款功能齐全的剪辑工具,巧妙地组合各种镜头和音乐,一个简单的故事就能变得栩栩如生。让你的回忆不再只是照片的简单拼接。今天,我就拿出我比较常用的四款视频剪辑工具,来与你们探讨探讨!!
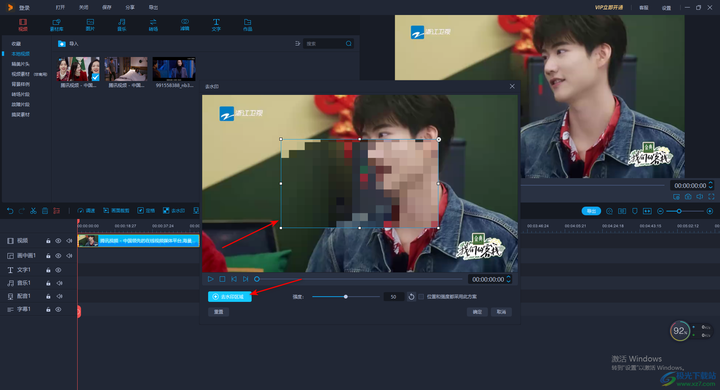
1.福昕视频剪辑
直通车(复制粘贴到浏览器打开):www.pdf365.cn/foxit-clip/?agent=csdnzy
操作教程(复制粘贴到浏览器打开):mp.weixin.qq.com/s/8okEwElhAK3FZfELlntqbA
我第一次使用这款视频剪辑是在一个周末的家庭聚会上。当时的氛围很nice,我一瞬间想记录下大家的快乐时光,并且制作一个有趣的短片分享给家人。于是我就马上动手了,打开这款软件,我发现它的视频剪辑操作非常简单,即使当时我还是处于没有任何经验水平的我也能轻松上手。而且还可以通过使用它的多轨道编辑功能,能够将不同的片段和背景音乐完美地融合在一起,最终制作出了一个温馨又有趣的视频。这次的体验让我即开心又满足。

如果你想我一样需要快速完成一个项目,比如制作一个简单的教程或者家庭视频,这款软件的快速预览功能可以让你迅速看到编辑效果,不用等待长时间的渲染。而且它的界面简洁,操作直观,非常适合像我这样的新手。
2.爱拍剪辑
直通车(复制粘贴到浏览器打开):www.aip.yswdap.vip/gp/aipai.html?c=fuxin-jianji
有一次我在旅行中沿途拍摄了很多美丽的风景照和视频片段,一整天玩下来真的是累到不想动了。但是这样阻止不了我想分享的心。在回到酒店后发现整理起来非常麻烦。就在这时我发现这款剪辑工具有一个“一键剪辑”功能,它可以从我上传的素材库中自动识别最佳片段并生成一段精美的视频。而我只需要选择我喜欢的音乐和一些基本的设置,几分钟内就完成了整个旅行纪录片的制作。

如果你想要快速生成风格统一作品,它提供了大量的预设模板,覆盖了旅行、美食、运动等多个领域,你只需根据提示填充自己的素材即可,而且它还可以自定义文字样式、颜色调整等,以满足你的不同需求。

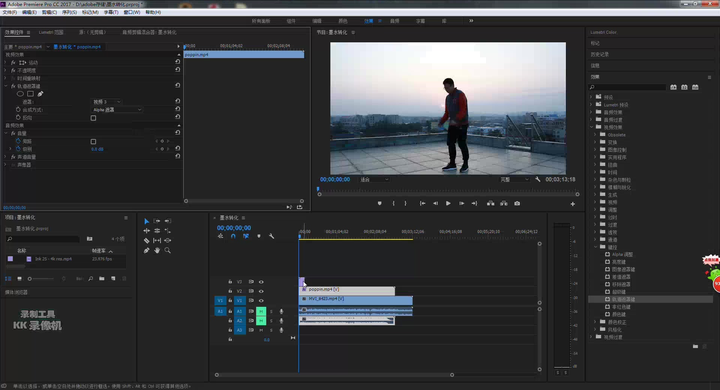
3.Adobe Premiere Pro (PR)
直通车(复制粘贴到浏览器打开):www.adobe.com/cn/wam/ppro.html
因为之前的经历,慢慢的我成为一名业余的视频制作爱好者,让我对视频制作的要求越来越高。一直梦想着能够制作出高质量的视频内容。当我了解到这款工具的强大功能后,便决定尝试一下。起初,面对复杂的界面和众多的选项,我感到有些不知所措,完全不知道从哪下手。但随着不断学习和实践,我逐渐掌握了它的使用方法。现在,我已经能够利用它制作出具有专业水准的作品了。如果你是一个追求更高画质和视觉效果的创作者,它给你提供了强大的颜色校正和特效制作能力,可以轻松实现电影级别的画面效果。
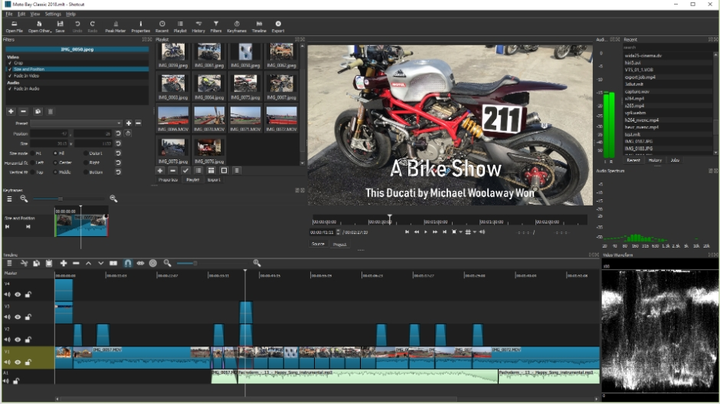
4.Shotcut
直通车(复制粘贴到浏览器打开):shotcut.org/
记得第一次接触它的是在一个朋友的推荐下使用的,当时我正在寻找一款性价比高的视频编辑软件,然后再跟朋友闲聊的时候给我推荐;我就去尝试了下,确实如此。尽管它的界面看起来是比较简单的,但它提供了许多高级功能,如多轨道编辑、色彩校正等。如果你需要高效工作的话,它的快捷键操作方式非常实用,可以大大提高工作效率。不过这也意味着你需要花时间去记忆这些快捷键。
5.Audio Cutter
直通车(复制粘贴到浏览器打开):mp3cut.net/

6.media
直通车(复制粘贴到浏览器打开):www.media.io/

7.闪电音频剪辑
直通车(复制粘贴到浏览器打开):www.jinzhousoft.net/bd43975058/yinpinjianji.html

8.好简单批量智剪
直通车(复制粘贴到浏览器打开):www.d1kf.cn/haov/index.html?bd_vid=11292290847413224959

9.迅捷音频转换器
直通车(复制粘贴到浏览器打开):pc.recuvachina.com/audioconverter2/

10.QVE音频剪辑
直通车(复制粘贴到浏览器打开):www.qvevideo.com/business/audio?bd_vid=7771262152661283388
这就是我比较常用到的视频剪辑工具,在我对它们使用过后,对它们各自亮点的总结。如果你真好需要的话,那就太好了;能为你提供帮助,让我感到开心。那么你有哪些好用的视频剪辑工具呢!也欢迎你来推荐推荐!!!!!