Html5手机静态网站设计wordpress 4.0
2023年国家公务员考试报名已经开始了,我们在考试平台提交报名信息的时候,有一项就是需要上传证件照片,对于证件照片也会有具体的要求,比如背景底色、尺寸大小、dpi和kb大小。今天就为大家详细介绍一下关于国考证件照背景色的内容,以及怎么为证件照换背景。
照片要求
1、照片底色:背景颜色应为蓝色或白色;
2、照片像素:不低于295*413px;
3、照片保存格式:JPG或JPEG格式;
4、免冠正面电子证件照片。
如果我们手上的证件照不是白色或者蓝色该怎么把照片替换背景颜色呢?这里推荐一个特别简单的照片换底色的方法,使用压缩图证件照制作功能中的证件照换背景功能就可以快速更改证件照背景颜色,下面是详细的操作步骤。
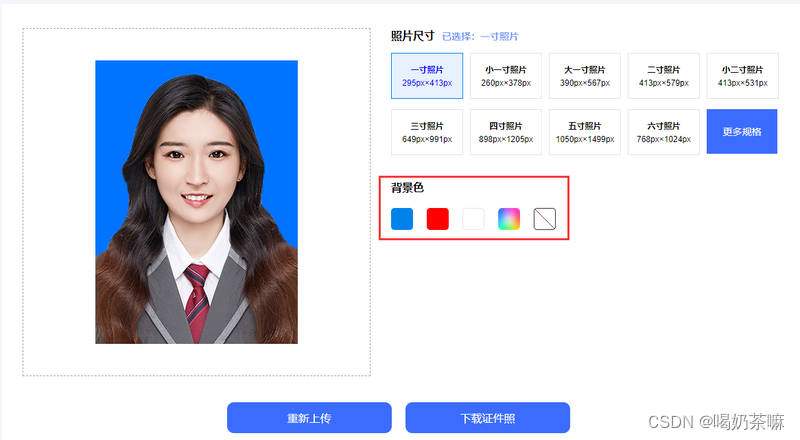
在浏览器中搜索“压缩图”,进入网站之后在导航栏中选择【证件照换背景】。

点击上传,选择背景色,处理完成后保存即可。
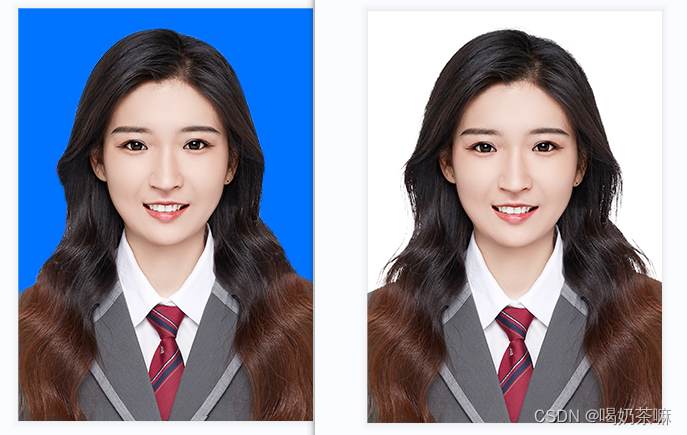
证件照换背景前后对比:
以上就是怎么修改证件照背景颜色的方法啦,同样的操作步骤也适用于手机端操作哦,这款给证件照换底色的软件小白也能轻松上手,赶紧来体验一下吧。