招生门户网站建设方案电信改公网ip可以做网站吗
最近换了新电脑,新下载了Vscode,记录一下设置项。
Vscode 版本

想要的效果
js文件中输入log(点击tab键),自动补全为 console.log()
Vscode 文件=》首选项=》设置
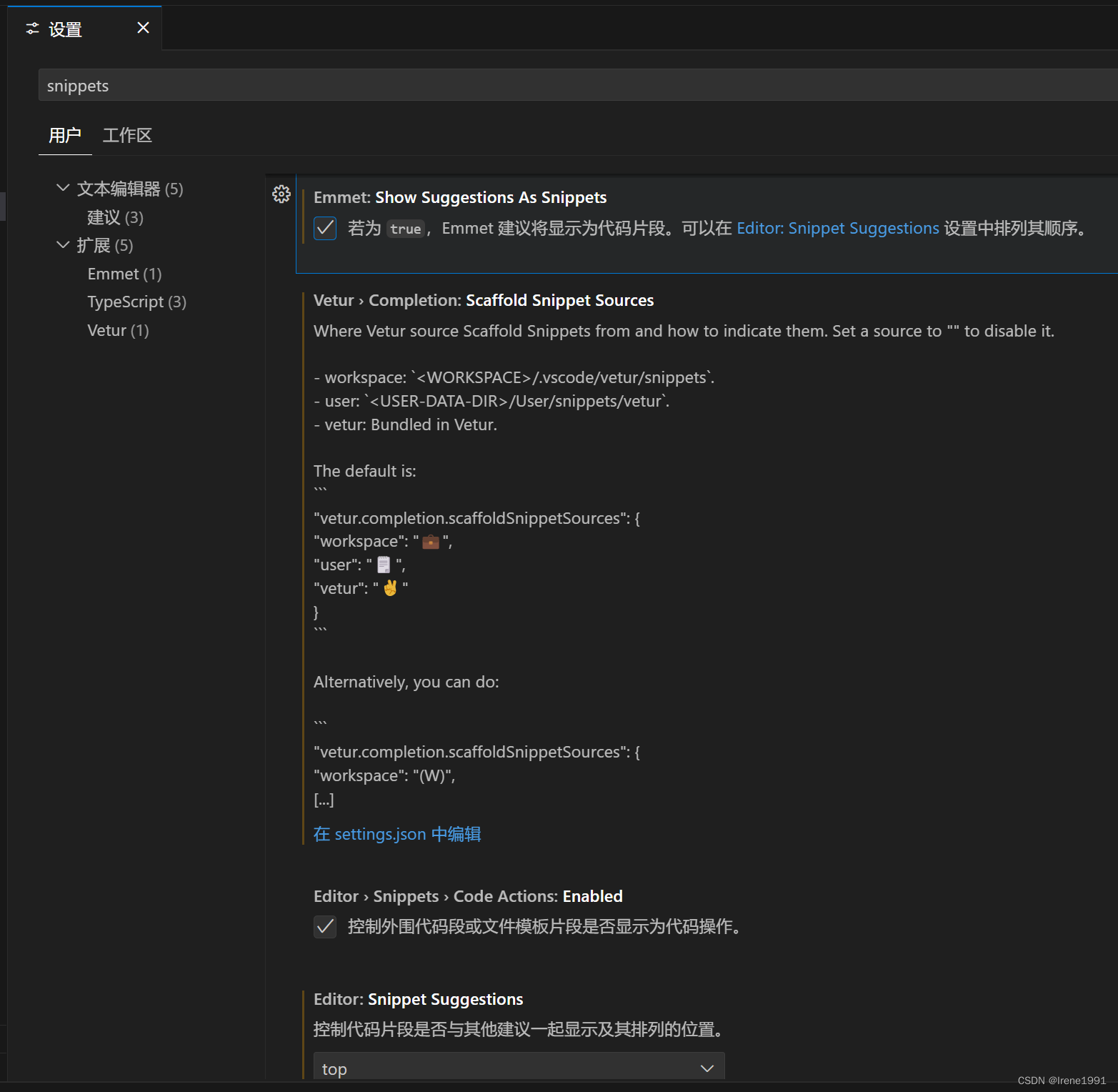
搜索:snippets
Emmet: Show Suggestions As Snippets
勾选为 true (也可以不选)
Editor: Snippet Suggestions
默认值 inlilne
修改为 top
代码效果
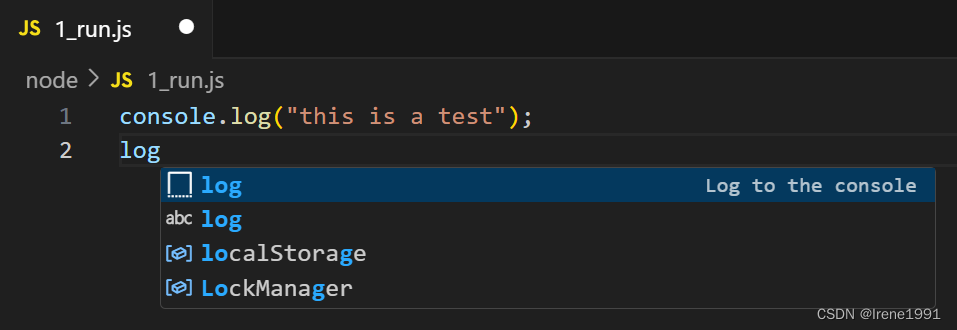
设置没修改之前是
abc log 排在队列第一

设置参考
