个人简历模板免费下载网站深圳龙华区是富人区吗
文章目录
- 安装交叉编译工具
- 安装qt creator开发环境
- 配置交叉编译
- 示例demo
- 参考
安装交叉编译工具
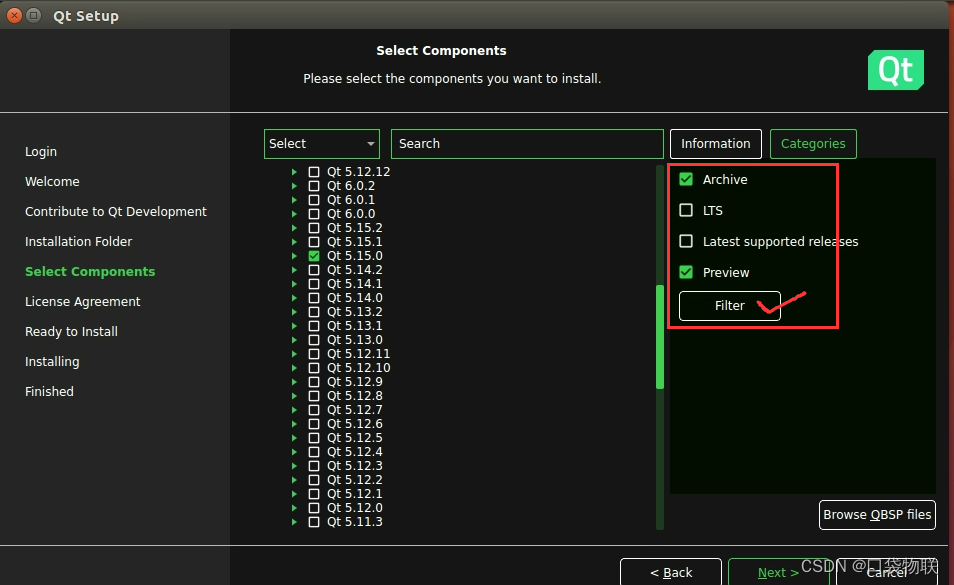
安装qt creator开发环境
1 官网
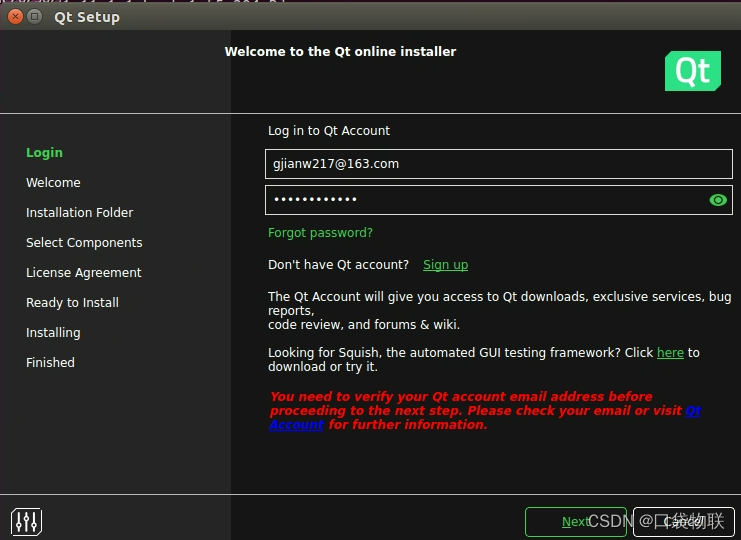
2 填写信息
3 下载


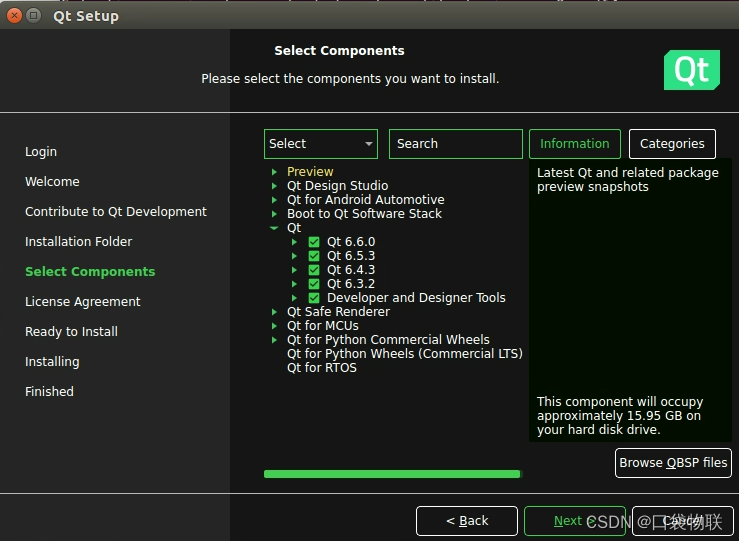
默认没有出现Qt5.15版本
WISONIC\80081001@ub16-1001:~$ /opt/Qt/Tools/QtCreator/bin/qtcreator
/opt/Qt/Tools/QtCreator/bin/qtcreator: /lib/x86_64-linux-gnu/libz.so.1: version `ZLIB_1.2.9' not found (required by /opt/Qt/Tools/QtCreator/bin/../lib/Qt/lib/libQt6Gui.so.6)
/opt/Qt/Tools/QtCreator/bin/qtcreator: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27' not found (required by /opt/Qt/Tools/QtCreator/bin/../lib/Qt/lib/libQt6Gui.so.6)
/opt/Qt/Tools/QtCreator/bin/qtcreator: /lib/x86_64-linux-gnu/libc.so.6: version `GLIBC_2.25' not found (required by /opt/Qt/Tools/QtCreator/bin/../lib/Qt/lib/libQt6Core.so.6)
/opt/Qt/Tools/QtCreator/bin/qtcreator: /lib/x86_64-linux-gnu/libc.so.6: version `GLIBC_2.28' not found (required by /opt/Qt/Tools/QtCreator/bin/../lib/Qt/lib/libQt6Core.so.6)
/opt/Qt/Tools/QtCreator/bin/qtcreator: /usr/lib/x86_64-linux-gnu/libstdc++.so.6: version `CXXABI_1.3.11' not found (required by /opt/Qt/Tools/QtCreator/bin/../lib/Qt/lib/libQt6Core.so.6)
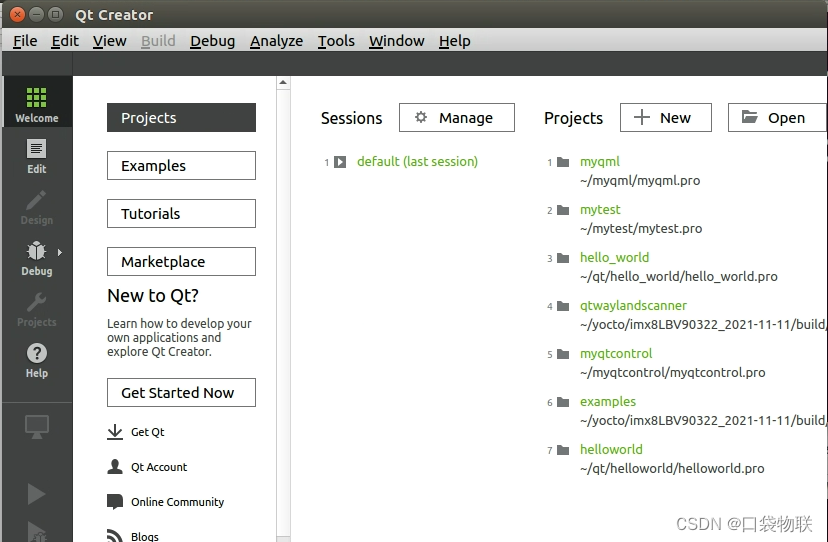
安装低版本qtcreator
1 下载
https://download.qt.io/archive/qtcreator/4.14/4.14.2/
2 修改权限
3 安装
配置交叉编译
tools–>options–>compilers
增加C
增加C++
3)tools–>options–>Qt versions

4)tools–>options–>Kits
qt kits
示例demo
2 运行qt media视频
3 定位问题
参考
【1】https://blog.csdn.net/ACE_YOUNG/article/details/131196528