做网站时管理员权限的页面濮阳建站推广哪家好
文章目录
- 一.概要
- 二.单片机型号命名规则
- 三.STM32F103系统架构
- 四.STM32F103C8T6单片机启动流程
- 五.STM32F103C8T6单片机主要外设资源
- 六.编程过程中芯片数据手册的作用
- 1.单片机外设资源情况
- 2.STM32单片机内部框图
- 3.STM32单片机管脚图
- 4.STM32单片机每个管脚可配功能
- 5.单片机功耗数据
- 6.FALSH编程时间,擦写次数
- 7.I/O高低电平电压表格
- 8.外设接口最大速度
- 七.STM32F103C8T6单片机应用场景
- 八.总结
一.概要
单片机(MCU)是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU内核、随机存储器SRAM、存储器FLASH、多种I/O口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统。
STM32是ST公司基于ARM Cortex-M3内核开发的32位微控制器。
我们常用的STM32F103C8T6就是其中的一款单片机。
STM32F103C8T6单片机主要特性
内核:ARM Cortex-M3
主频:72MHz
RAM:20k(SRAM)
ROM:64k(Flash)
供电:2.0~3.6V(标准3.3V)
芯片实物图如下:
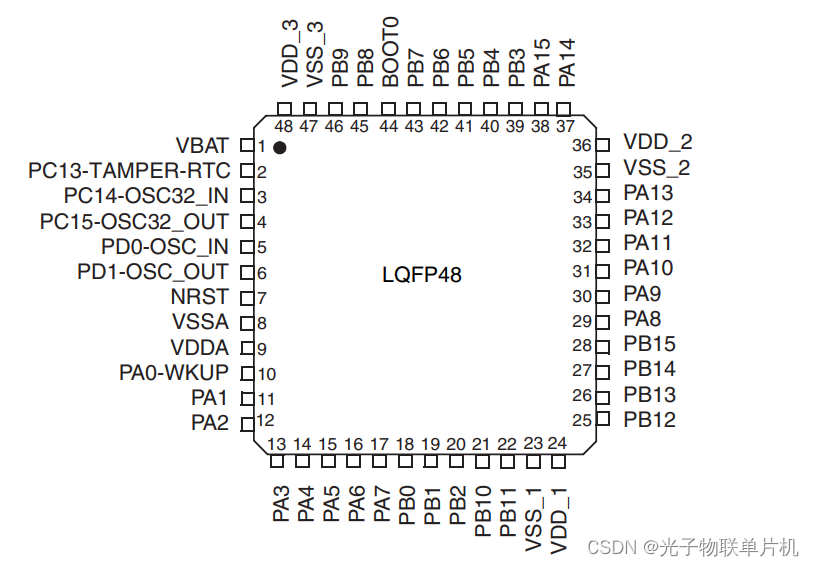
芯片引脚定义如下:
二.单片机型号命名规则
根据命名规则,STM32F103C8T6就是基础型的,48脚,64K闪存,LQFP贴片封装,-40~85度的工业级的单片机。

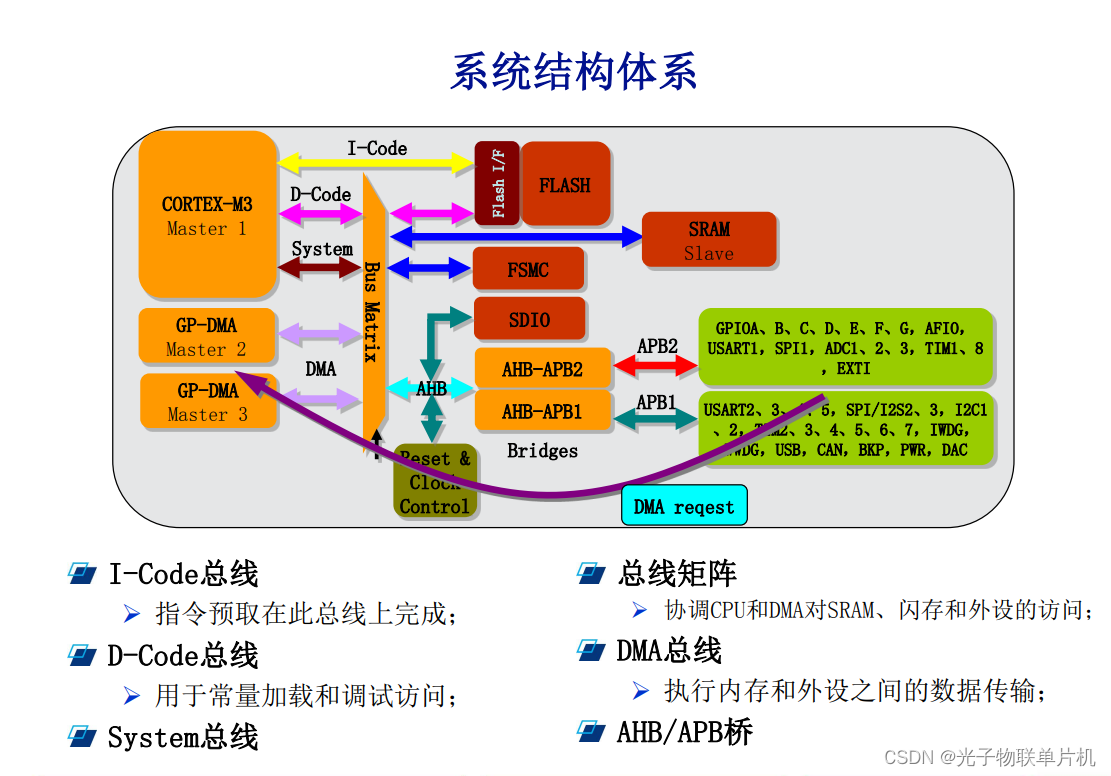
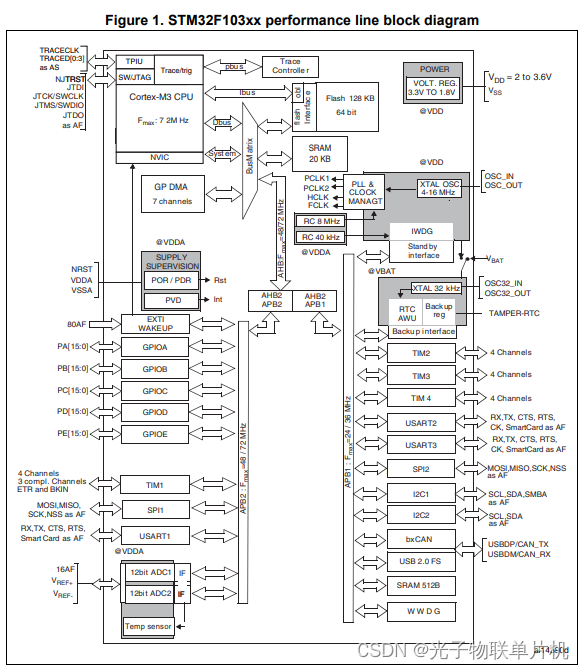
三.STM32F103系统架构
下图左上角为内核(ARM Cortex-M3),I-Code和D-Code主要连接Flash闪存。
Cortex‐M3内核:
是一个 32 位处理器内核。内部的数据总线是 32 位的,寄存器是 32 位的,存储器接
口也是 32 位的。Cortex‐M3采用了哈佛结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行不悖。这样一来数据访问不再占用指令总线,从而提升了性能。
FLASH闪存:
我们编写好的程序经过Keil5编译之后都是一条条指令,存放在FLASH中。内核(ARM Cortex-M3)通过I-Code总线来取里边的指令,所以FLASH主要是用来存程序,但也开放一部分空间可以存数据。
SRAM存储器:存放程序运行时的变量数据。
I-Code指令总线:
内核(ARM Cortex-M3)要从FLASH中读取指令来执行程序就必须通过ICode总线,它几乎每时每刻都需要被使用,它是专门用来取指的,所以叫它指令总线。
D-Code数据总线:
我们在写程序的时候,数据有常量也有变量,常量就是固定不变的,用C语言中的const关键字修饰,是放在FLASH,变量是可变的,是放在SRAM,所以内核(ARM Cortex-M3)可以通过D-code总线访问FLASH和SRAM读取数据,所以叫它数据总线。
APB2,APB1系统总线:
用于挂载外设(GPIO、USART、I2C、SPI等这些外设)(APB2一般和AHB同频率最高可以到72MHz,APB1最高只能到36MHz)。
System总线主要是用来访问外设寄存器,我们通常说的寄存器编程,即读写寄存器都是通过System总线来完成的。
DMA总线:可以用来传输数据,这个数据可以是某个外设的数据寄存器,也可以是SRAM或者FLASH中的数据。
FSMC跟SDIO在STM32F103C8T6中是没有的,会在STM32F103ZET6等引脚多的单片机中。
四.STM32F103C8T6单片机启动流程
通过单片机BOOT0引脚与BOOT1引脚的电平高低组合,配置单片机启动模式
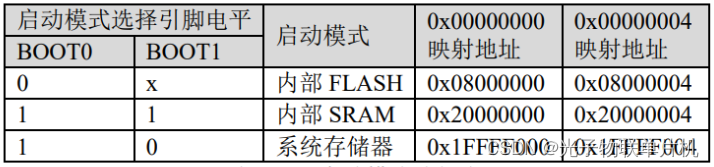
我们一般都用下拉电阻配置BOOT0引脚为低电平,单片机的SWD下载口用下载器下载完代码,程序就能直接运行,这是最常用的启动模式。
STM32F103C8T6单片机从FLASH的启动流程:
当芯片上电后采样到 BOOT0 引脚为低电平时,0x00000000 和 0x00000004 地址被映射到内部 FLASH 的首地址 0x08000000 和 0x0800 0004。因此,内核离开复位状态后,读取内部 FLASH 的 0x08000000 地址空间存储的内容,赋值给栈指针 MSP,作为栈顶地址,再读取内部 FLASH 的 0x08000004 地址空间存储的内容,赋值给程序指针 PC,作为将要执行的第一条指令所在的地址。完成这两个操作后,内核就可以开始从 PC 指向的地址中读取指令执行了,0x0800 0004是中断向量表的起始地址,这就是复位程序的入口地址,接着跳转到复位程序入口处,初始向量表,然后设置时钟,设置堆栈,最后跳转到main函数,即进入用户程序。
五.STM32F103C8T6单片机主要外设资源
STM32F103C8T6单片机集成了丰富的外设,比如GPIO,定时器,SPI,USART,CAN,USB,ADC等外设,这些丰富的外设能驱动很多各种接口的传感器,很多时候编程的工作也是对这些外设进行驱动编程。
六.编程过程中芯片数据手册的作用
在编程的过程中,会经常查看一些资料,比如芯片数据手册会经常用到,作用比较大,主要需要查看哪几点,下面做个简单介绍:
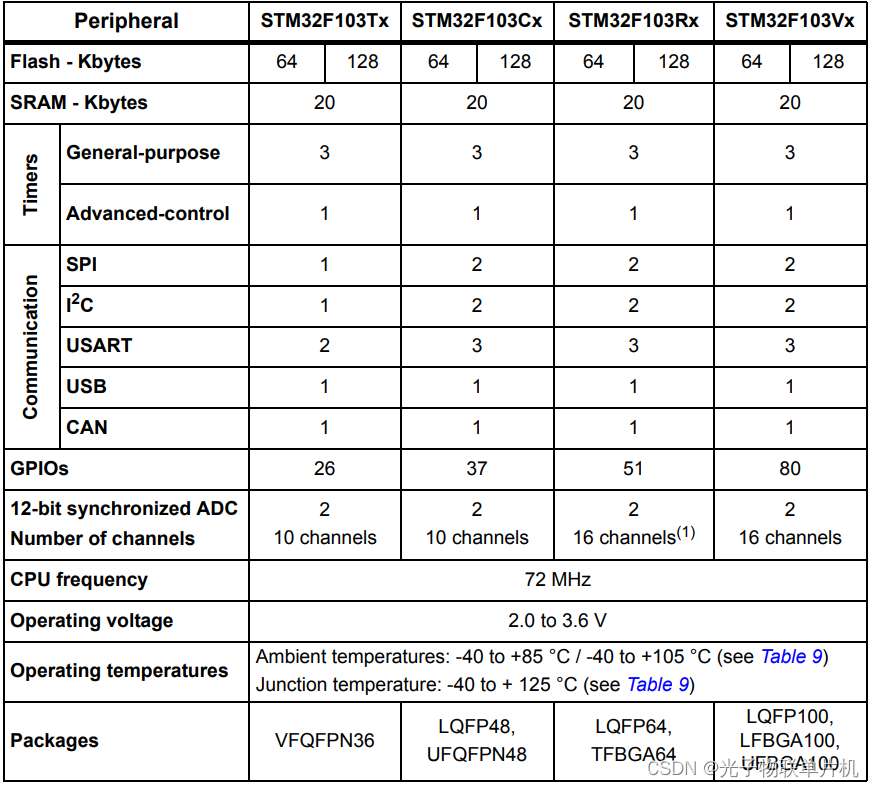
1.单片机外设资源情况
编程的时候会了解是否存在这个外设,外设数量是否正确,FLASH的大小,RAM的大小,空间是否会超,需要查看确认。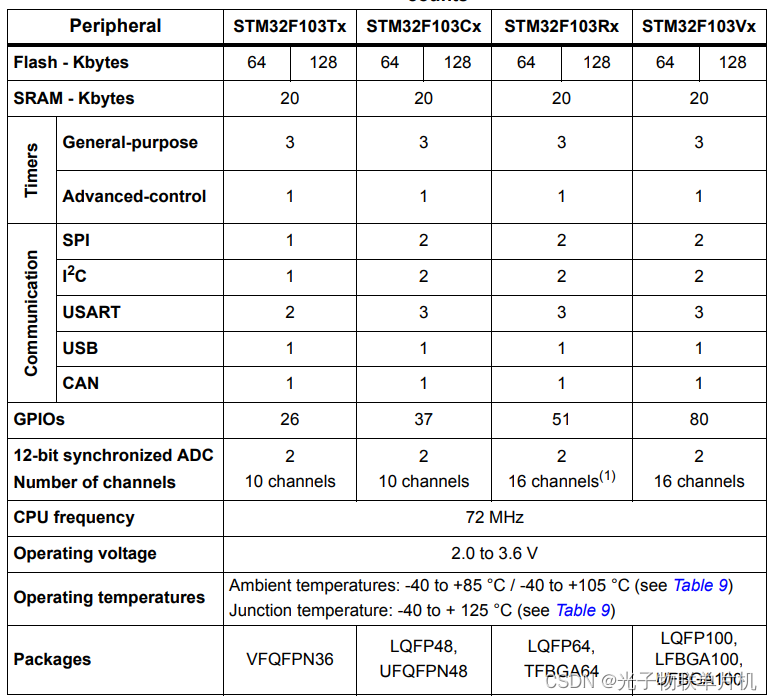
2.STM32单片机内部框图
需要知道某个外设是挂在哪个总线下面,最高主频多少,是否存在这个外设等数据,需要查看这个单片机框图。
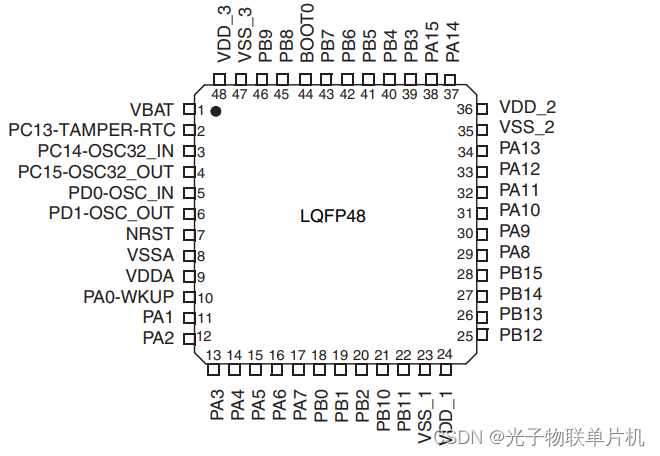
3.STM32单片机管脚图
在代码的调试过程中,需要确认硬件是否连接正确,需要知道单片机相应引脚的定义。
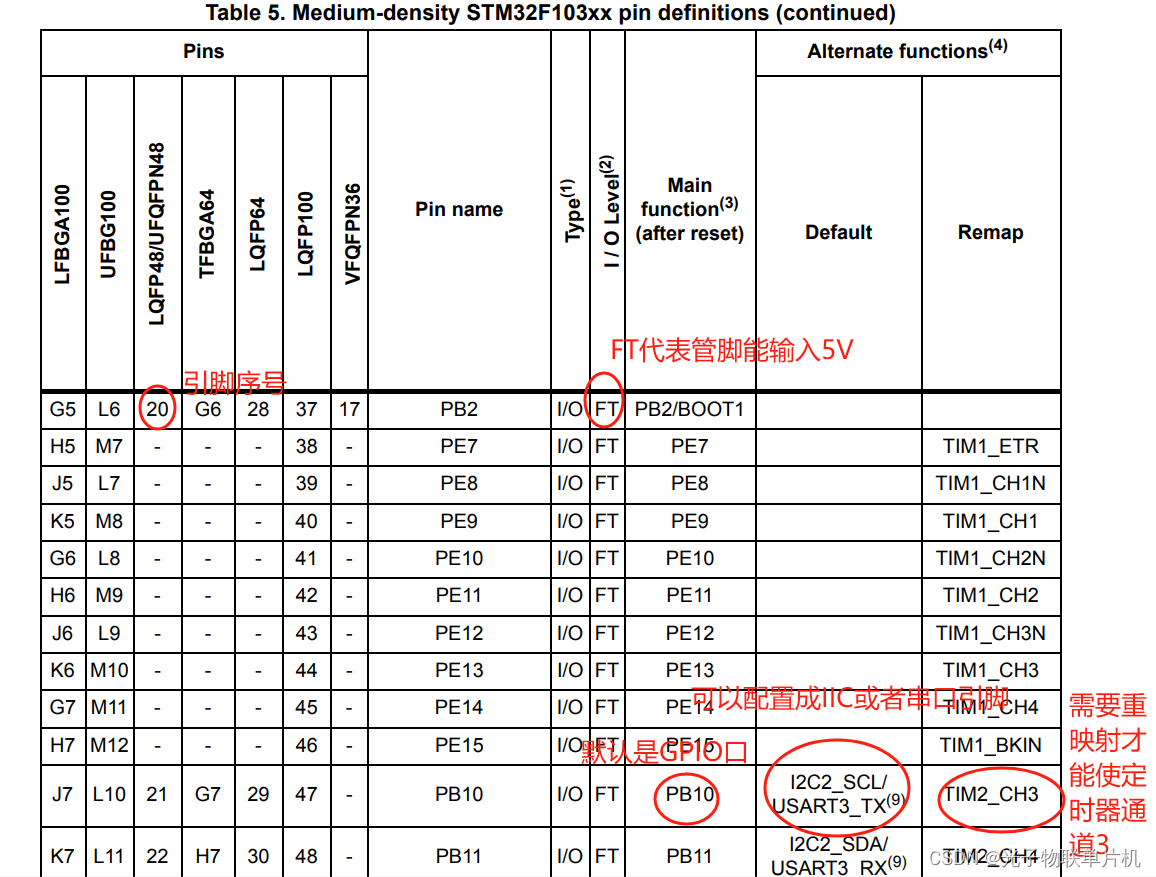
4.STM32单片机每个管脚可配功能
在写代码过程中,需要知道这个引脚的基本功能,是否5V容忍,可以配置成啥外设,是否需要重映射等功能,需要查看这表格。
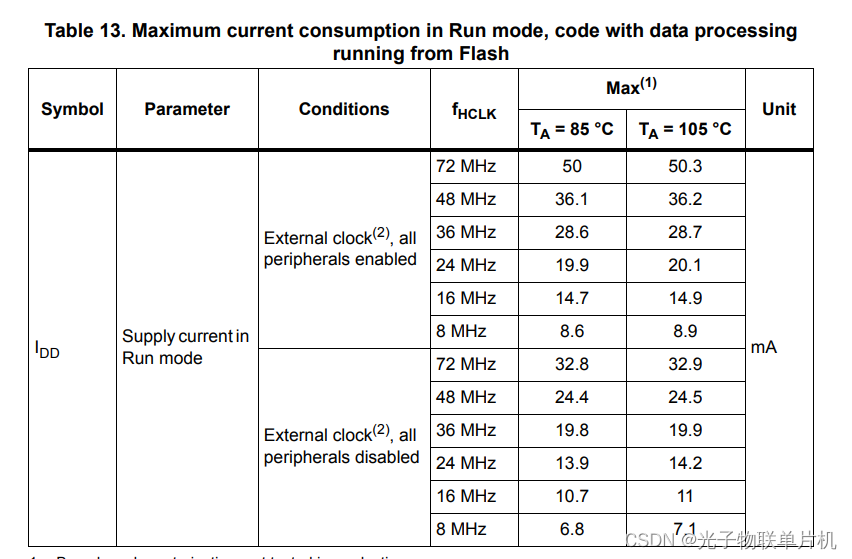
5.单片机功耗数据
在低功耗的项目中,需要知道配置成哪个低功耗模式,哪种主频功耗能符合功耗要求,需要查看这表格。
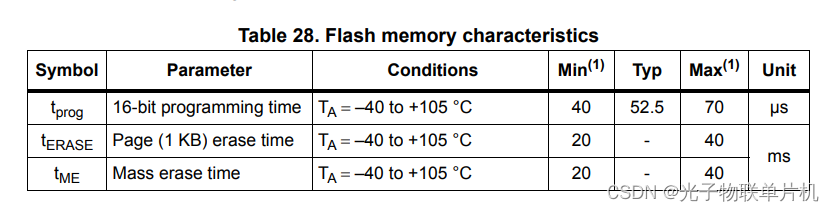
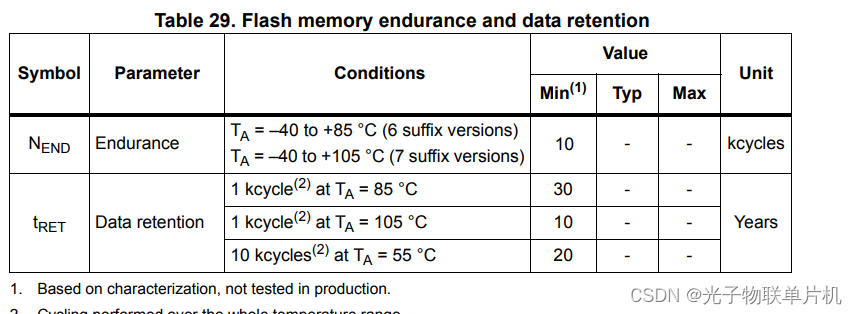
6.FALSH编程时间,擦写次数
在FLASH的存储操作中,需要知道编程时间,保证数据能正确写入,需要知道擦写次数,保证芯片不会因为擦写过多而损坏。
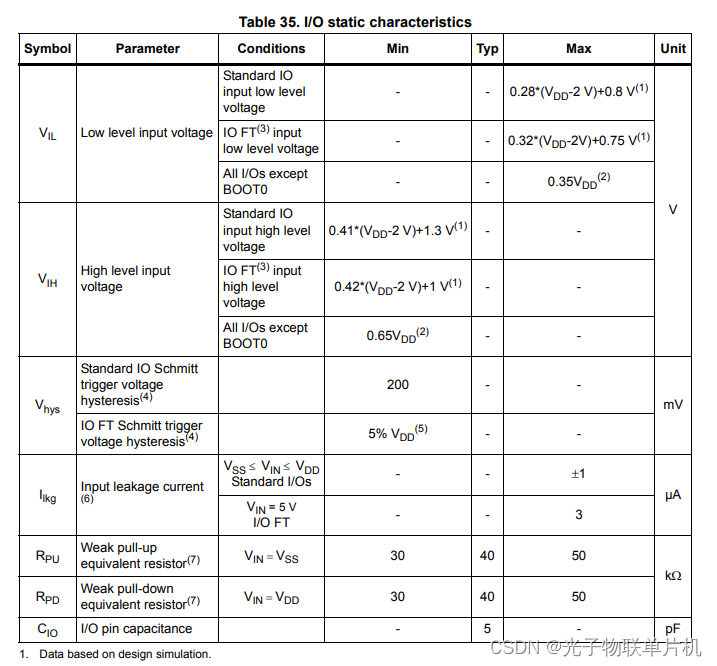
7.I/O高低电平电压表格
在I/O读取操作时,有些电压采集到的不是高电平或者低电平,需要查这表格确认读到的电压符合单片机读到的高低电平电压要求。
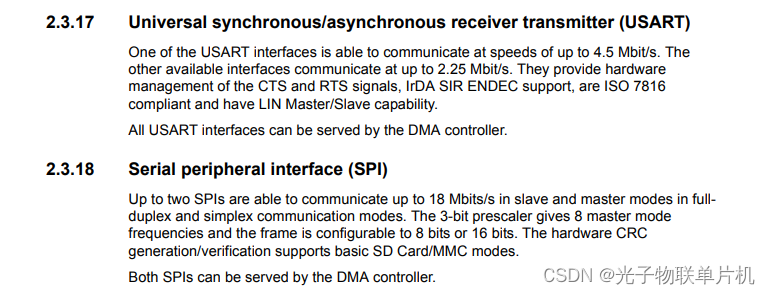
8.外设接口最大速度
还有一些外设的最大速度,比如SPI,USART口的最快速度也都能在芯片手册中找到
七.STM32F103C8T6单片机应用场景
工业自动化:STM32F103C8T6具有丰富的外设接口,如USART、SPI、I2C等,可以方便地与各种传感器和执行器进行通信和控制。在工业自动化领域,它可以用于实现各种控制逻辑、数据采集和通信等功能。
智能家居:STM32F103C8T6具有低功耗、高性能的优点,可以作为智能家居系统的主控制器。通过与传感器、执行器等设备进行通信和控制,可以实现智能照明、智能安防、智能环境监测等功能。
智能交通:STM32F103C8T6可以用于智能交通系统的控制和管理。例如,它可以用于控制交通信号灯、监控道路状况、检测车辆违章等,提高交通效率和安全性。
医疗电子:STM32F103C8T6具有高精度、低功耗的特点,可以用于医疗电子设备的控制和监测。例如,它可以用于实现医疗设备的自动化控制、数据采集和传输等功能。
消费电子:STM32F103C8T6也可以用于消费电子产品的设计和开发。例如,它可以用于实现智能手表、智能音箱、智能玩具等产品的控制逻辑和数据处理等功能。
八.总结
在了解STM32单片机大概的内部信息和特性之后,基于STM32F103C8T6的小系统板,配合STLINK下载调试器,在STM32CubeMX软件和Keil 5软件的加持下就可以进行编程操作了。