韶关市开发区建设局网站网页设计优化网站建设可以吗
作者:杨亮Jerry
作为多年的大前端程序开发工作者,就目前的形式,个人浅见,在未来3-5年,移动端依旧是Android系统和iOS系统的天下。不过基于鸿蒙系统的应用开发还是值得我们去花点时间去了解下的,阅读并实践官网的开发文档和实践案例后,我们会发现其编程模式和Android的Jetpack Compose以及基于Dart语言开发Flutter跨平台应用程序非常相似,它们都是声明式的编程方式,非常容易理解。相信有过Compose或者Flutter开发经验的小伙伴去学习HarmonyOS应用开发会非常简单,容易上手。
虽然现在工作不是全部时间在Coding上了,但是自己在技术上还是要有所坚持,后续会抽时间继续学习HarmonyOS的开发,毕竟艺多不压身(天朝程序猿😂)。
一、ArkTS与TypeScript
1、声明式UI基本概念
(1)、应用界面是由一个个页面组成,ArkTS是由ArkUI框架提供,用于以声明式开发范式开发界面的语言。
(2)、声明式UI构建页面的过程,其实是组合组件的过程,声明式UI的思想,主要体现在两个方面:
- 描述UI的呈现结果,而不关心过程
- 状态驱动视图更新
2、按照官网上的说法,ArkTS是HarmonyOS的主力应用开发语言。
它在TypeScript(简称TS)的基础上,匹配ArkUI框架,扩展了声明式UI、状态管理等相应的能力,让开发者以更简洁、更自然的方式开发跨端应用。
ArkTS、TypeScript和JavaScript之间的关系: JavaScript是一种属于网络的高级脚本语言,已经被广泛用于Web应用开发,常用来为网页添加各式各样的动态功能,为用户提供更流畅美观的浏览效果。 TypeScript 是 JavaScript 的一个超集,它扩展了 JavaScript 的语法,通过在JavaScript的基础上添加静态类型定义构建而成,是一个开源的编程语言。 ArkTS兼容TypeScript语言,拓展了声明式UI、状态管理、并发任务等能力。

TypeScript的语法非常简单,有过Java、Kotlin、Dart等语言开发经验的小伙伴,会非常容易上手。可以在其官网进一步了解TS的语法知识。
3、ArkTS基础知识
(1)、ArkUI开发框架

上面这张图是ArkUI开发框架的整体架构,其中,基于TS扩展的声明式UI范式中所用的语言就是ArkTS。
(2)、ArkTS声明式开发范式

上面这张图是从官网下载下来的一个介绍ArkTS声明式开发范式 的代码示例,UI界面会显示两段文本和一个按钮,当开发者点击按钮时,文本内容会从’Hello World’变为‘Hello ArkUI’。
-
装饰器 用来装饰类、结构体、方法以及变量,赋予其特殊的含义,如上述示例中 @Entry 、 @Component 、 @State 都是装饰器。具体而言, @Component 表示这是个自定义组件; @Entry 则表示这是个入口组件; @State 表示组件中的状态变量,此状态变化会引起 UI 变更。
-
自定义组件 可复用的 UI 单元,可组合其它组件,如上述被 @Component 装饰的 struct Hello。
-
UI 描述 声明式的方式来描述 UI 的结构,如上述 build() 方法内部的代码块。
-
内置组件 框架中默认内置的基础和布局组件,可直接被开发者调用,比如示例中的 Column、Text、Divider、Button。
-
事件方法 用于添加组件对事件的响应逻辑,统一通过事件方法进行设置,如跟随在Button后面的onClick()。
-
属性方法 用于组件属性的配置,统一通过属性方法进行设置,如fontSize()、width()、height()、color() 等,可通过链式调用的方式设置多项属性。
-
状态管理 在应用开发中,除了UI的结构化描述之外,还有一个重要的方面:状态管理。如上述示例中,用 @State 装饰过的变量 myText ,包含了一个基础的状态管理机制,即 myText 的值的变化会自动触发相应的 UI 变更 (Text组件)。ArkUI 中进一步提供了多维度的状态管理机制。
二、ArkTS开发实践
接下来会按照官网的实例进行第一次ArkTS的开发实践,基于自己的理解进行一些修改,学习基本知识。

上面两张图就是我们要实现的UI效果和交互逻辑,即要呈现一个学生名单列表,每个Item由一个Icon和一个Name横向组成,当选中某一个Item的时候,Icon要切换成选中图标,另外Name的样式也会发生一些变化。使用ArkTS实现这个学生名单列表的方法基本和Jetpack Compose以及Flutter的开发方式是一样的,下面进行代码拆分。
1、自定义组件的组成
ArkTS 通过 struct 声明组件名,并通过 @Component 和 @Entry 装饰器,来构成一个自定义组件。
使用 @Entry 和 @Component 装饰的自定义组件作为页面的 入口,会在页面加载时首先进行渲染。
import { StudentListPage } from '../view/StudentListPage';@Entry
@Component
struct Index {build() {Column() {StudentListPage();}.width('100%').height('100%').padding('10vp').backgroundColor($r('app.color.page_background'))}
}
这个Index使用 @Entry 和 @Component 装饰,所以会在页面加载时首先进行渲染,可以理解为当前页面的入口。
2.使用@Component装饰的自定义组件

如图所示,对列表进行了组件的拆分。
(1)、使用 @Component 来装饰自定义组件,组成学生列表的Item。在ArkTS中,对组件配置属性与布局方法很简单,支持链式调用。
(2)、状态:@State
使用 @State 装饰符改变组件状态,声明式UI的特点就是UI是随数据更改而自动刷新的,我们这里定义了一个类型为 boolean 的变量 isChecked,其被 @State 装饰后,框架内建立了数据和视图之间的绑定,其值的改变影响UI的显示。
@State isChecked: boolean = false;

- 可以使用
if/else表达式来渲染组件的显示与消失,当判断条件为true时,组建为已完成的状态,图片Icon显示选中图标,反之则为未完成状态,图片Iocn显示已选中状态。 - ArkTS提供了
@Builder装饰器,来修饰一个函数,快速生成布局内容,便面重复的UI描述内容。由于两个Image的实现具有大量重复代码,ArkTS提供了@Builder装饰器,来修饰一个函数,快速生成布局内容,从而可以避免重复的UI描述内容。这里使用@Bulider声明了一个checkIcon的函数,参数为url,对应要传给Image的图片路径。
@Builder checkIcon(icon: Resource) {Image(icon).objectFit(ImageFit.Contain).width($r('app.float.checkbox_width')).height($r('app.float.checkbox_height')).margin($r('app.float.checkbox_margin'))}
- 字体使用了
三目运算符来根据状态变化修改其透明度和文字样式,如opacity是控制透明度,decoration是文字是否有划线。通过isChecked的值来控制其变化。
Row() {if (this.isChecked) {this.checkIcon($r('app.media.ic_checked'))} else {this.checkIcon($r('app.media.ic_unchecked'))}Text(this.name).fontColor(this.isChecked ? Color.Red : Color.Black).fontSize(this.isChecked ? $r('app.float.item_checked_font_size') : $r('app.float.item_font_size')).fontWeight(500).opacity(this.isChecked ? 0.5 : 1.0).decoration({ type: this.isChecked ? TextDecorationType.LineThrough : TextDecorationType.None })}
- 在组件Row上添加
onClick点击事件,根据isChecked状态的更改来触发UI的更新。
Row() {....borderRadius(22).backgroundColor($r('app.color.start_window_background')).width('100%').height($r('app.float.list_item_height')).onClick(() => {this.isChecked = !this.isChecked;})
(3)、StudentListItem 自定义组件完整代码(Item)
@Component
export default struct StudentListItem {@State isChecked: boolean = false;private name?: string;@Builder checkIcon(icon: Resource) {Image(icon).objectFit(ImageFit.Contain).width($r('app.float.checkbox_width')).height($r('app.float.checkbox_height')).margin($r('app.float.checkbox_margin'))}build() {Row() {if (this.isChecked) {this.checkIcon($r('app.media.ic_checked'))} else {this.checkIcon($r('app.media.ic_unchecked'))}Text(this.name).fontColor(this.isChecked ? Color.Red : Color.Black).fontSize(this.isChecked ? $r('app.float.item_checked_font_size') : $r('app.float.item_font_size')).fontWeight(500).opacity(this.isChecked ? 0.5 : 1.0).decoration({ type: this.isChecked ? TextDecorationType.LineThrough : TextDecorationType.None })}.borderRadius(22).backgroundColor($r('app.color.start_window_background')).width('100%').height($r('app.float.list_item_height')).onClick(() => {this.isChecked = !this.isChecked;})}
}
3、循环渲染列表数据
ForEach基本使用中,只需要了解 要渲染的数据 以及要生成的 UI内容 两个部分,例如这里要渲染的数组为以上的几个学生名单,要渲染的内容是 StudentListItem 这个自定义组件,也可以是其他内置组件。
下面这张图是从官网上拷贝过来的,很清晰的描述了ForEach基本使用方式。
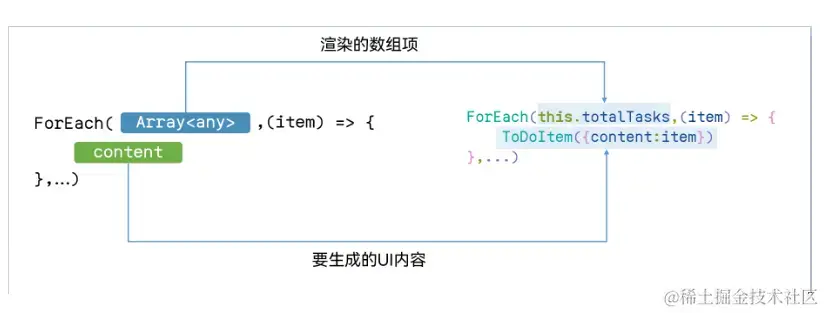
StudentListItem 这个自定义组件中,每一个 StudentListItem 要显示的文本参数 name 需要外部传入,参数传递使用 花括号 的形式,用 name 接受数组内的内容项item。
ForEach(this.studentList, (item: string) => {StudentListItem({ name: item })}, (item: string) => JSON.stringify(item))
StudentListPage的完整代码:
import DataModel from '../viewmodel/DataModel';
import StudentListItem from './StudentListItem';@Component
export struct StudentListPage {private studentList: Array<string> = [];aboutToAppear() {this.studentList = DataModel.getStudentList();}build() {Column({ space: 16 }) {Text($r("app.string.Student_List_Title")).fontSize('28fp').fontWeight(FontWeight.Bold).lineHeight('33vp').width('100%').margin({top: '24vp',bottom: '12vp',}).textAlign(TextAlign.Center)ForEach(this.studentList, (item: string) => {StudentListItem({ name: item })}, (item: string) => JSON.stringify(item))}.width('100%').height('100%').backgroundColor($r('app.color.page_background'))}
}
在组件生命周期
aboutToAppear()中去初始化加载数据。
加载数据的Model的代码:
export class DataModel {private studentList: Array<string> = ["丁程鑫","贺峻霖","肖战","成毅","刘耀文","李天泽","马嘉祺",];getStudentList(): Array<string> {return this.studentList;}
}export default new DataModel();
总结
本文是根据HarmonyOs官网进行学习阅读 ArkTS开发语言介绍 基本课程的阅读笔记,以及实现了一个学生名单列表的简单页面的Demo样例 StudentListPage ,实现效果是使用 ForEach 实现了一个List列表,每个Item中使用了 Row 来实现横向布局,Row 中嵌套了 Icon 内置组件和 Text 内置组件,根据状态装饰符 @State 装饰的bool布尔变量 isChecked 值的改变,结合 if/else 表达式 、三目运算符 等来修改 Icon 和 Text 组件的UI,其中又实用了 ArkTS 提供的 @Builder 装饰器,来修饰一个函数,快速生成布局内容,便面重复的UI描述内容。
整体来说,HramonyOS 使用 ArkTS 声明式语言的开发方式来描述 UI,这和 Jetpack Compose 开发、Flutter 的 Dart语言 跨平台开发、以及iOS的Swift开发方式非常相似,尤其组件名称和声明方式和Compose、Flutter非常相似,如果有过这几种系统、语言开发经验,上手HarmonyOS的ArkTS开发应该会很快。
虽然现在工作不是全部时间在Coding上了,但是自己在技术上还是要有所坚持,后续会抽时间继续学习HarmonyOS的开发,毕竟艺多不压身。