做宣传网站的公司做网站都要多少钱
帮助文档:6. Zabbix Appliance
一、zabbix下载安装
1、获取Zabbix Appliance镜像
Download Zabbix appliance
2、使用该镜像创建虚拟机
3、打开虚拟机控制台自动安装,等待安装完成即可
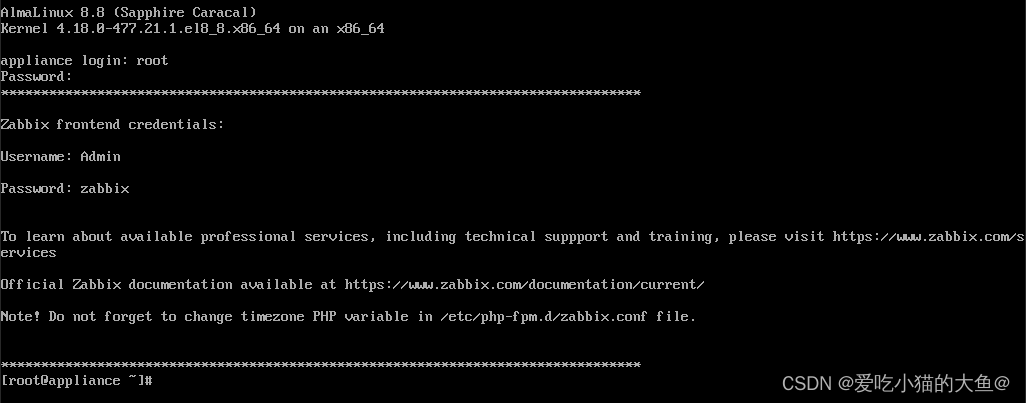
默认配置
系统/数据库:root:zabbix
Zabbix 前端:Admin:zabbix
前端可以从 http://<host> 进行访问。
4、更改时区
cp /usr/share/zoneinfo/Asia/Shanghai /etc/localtime
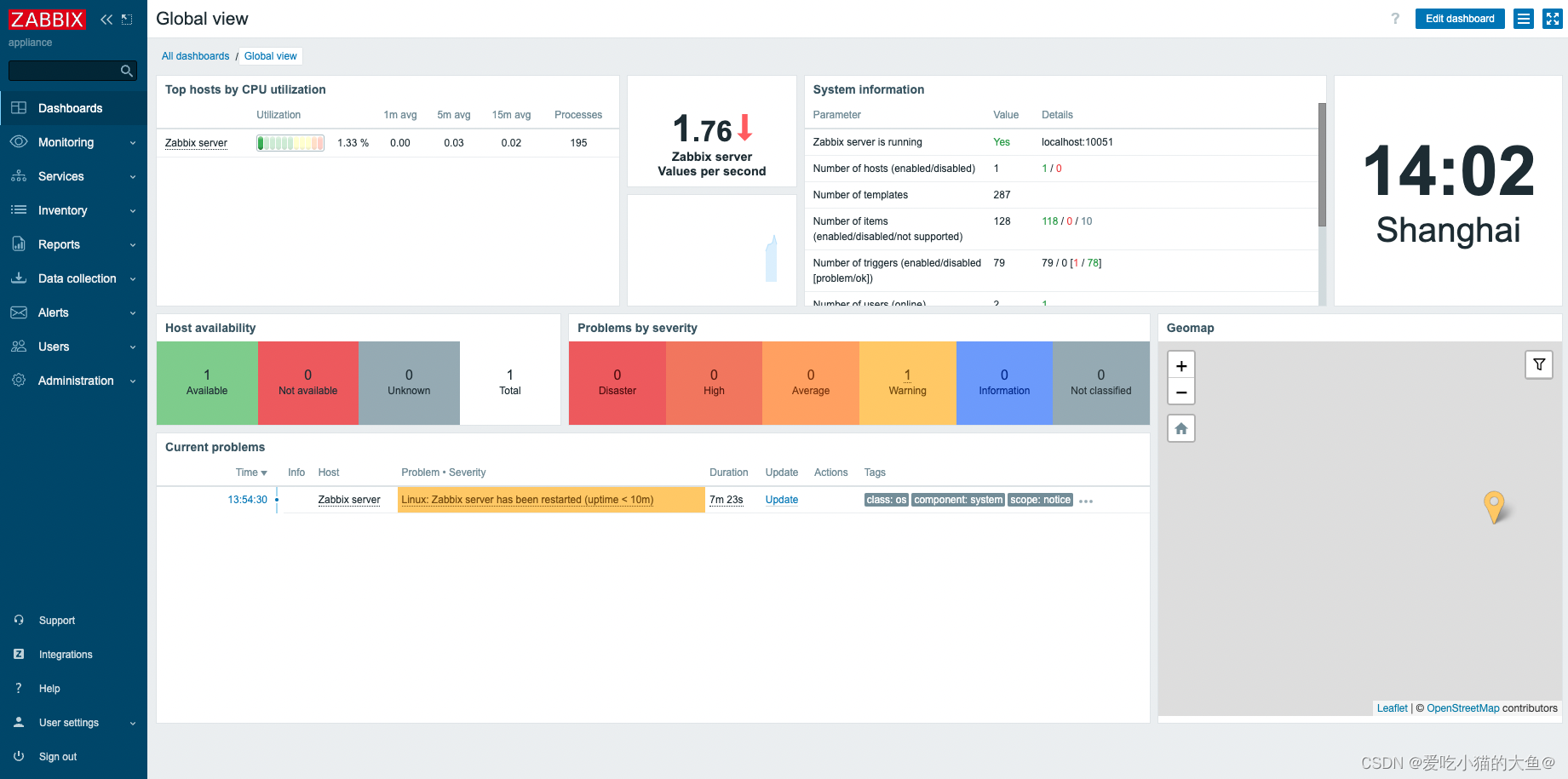
5、访问前端
二、SNMP Get使用
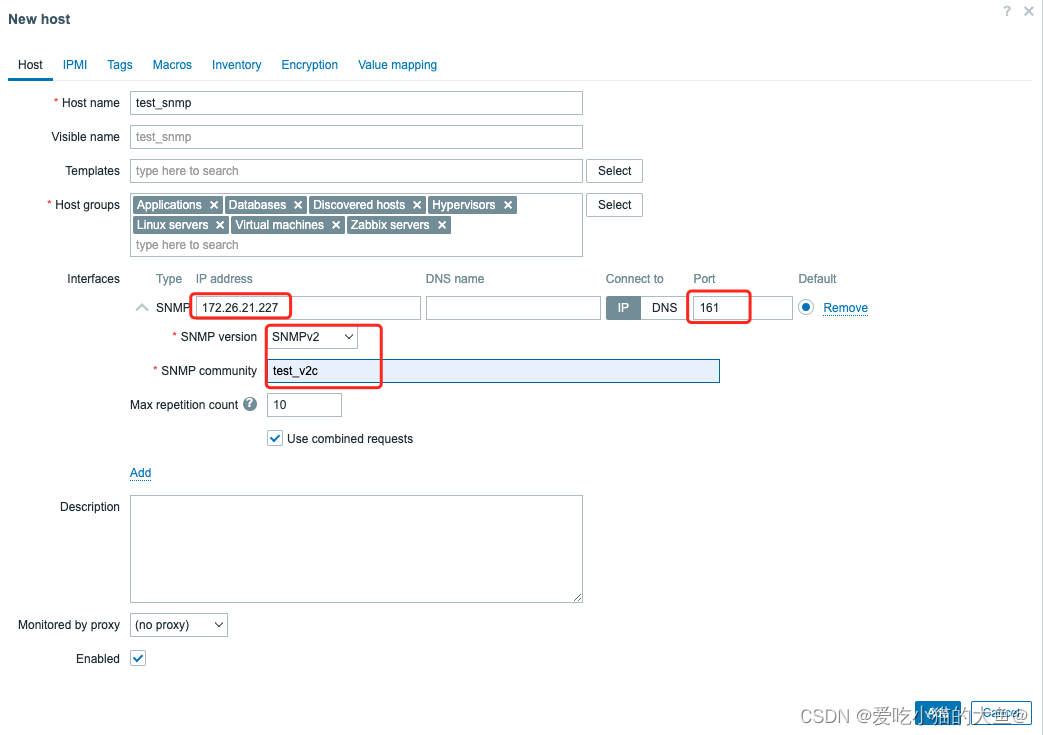
1、在zabbix中添加主机
Data collection--->Hosts--->Create host
设置snmp agent的ip、port、version等,设置完毕,点Add按钮保存即可
 新添加的主机,这里SNMP绿色图标可能是黄色,需要耐心等几分钟,zabbix服务与windowsSNMP建立通信需要时间间隔。
新添加的主机,这里SNMP绿色图标可能是黄色,需要耐心等几分钟,zabbix服务与windowsSNMP建立通信需要时间间隔。
 2、在zabbix中添加监控项
2、在zabbix中添加监控项
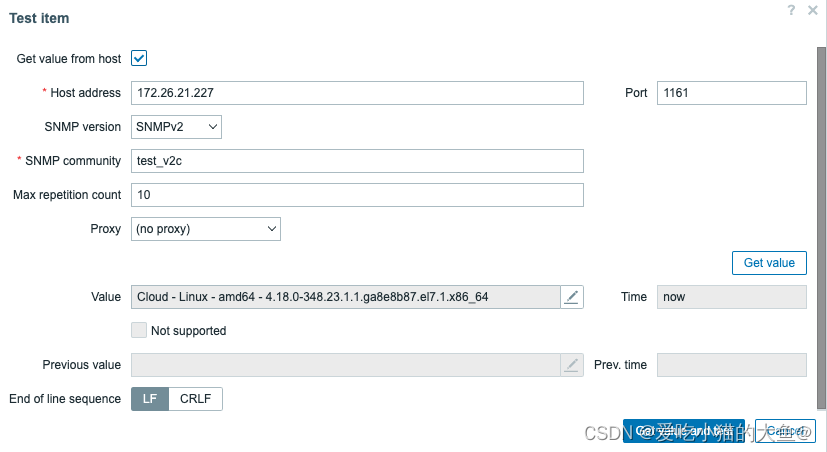
在添加的主机中点击Items--->Create Item

在Add之前记得先Test,确认连通性:Test--->Get value and test,确认没有报错且Value中有值