网站建设安全级别南宁市网站开发公司
 有朋自远方来,必先苦其心志,劳其筋骨,饿其体肤,空乏其身,鞭数十,驱之别院
有朋自远方来,必先苦其心志,劳其筋骨,饿其体肤,空乏其身,鞭数十,驱之别院
一、二叉树
1、二叉树的概念
1.1 二叉树中组分构成名词概念
1.2 二叉树的结构概念
1.3 特殊的二叉树
2、二叉树的存储结构
2.1 顺序存储
2.2 链式存储
二、二叉树的性质
三、完结撒❀
前言:
在你的想象中如果有一个“二叉树”会是什么样子呢?

顾名思义,现实中的二叉树我们就可以抽象的看成数据结构中的二叉树:
可以看出来把它叫做树是因为它具有树一样的树形结构看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的。
注意:树形结构中,子树之间不能有交集,否则就不是树形结构
我们思考下面问题:
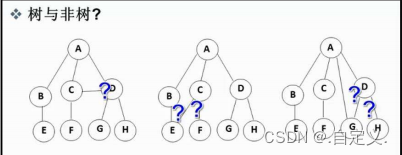
上面哪些为树,而哪些又不是树呢?
——————————————————————————————————————————————————
答案:
–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀正文开始❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–❀–
一、二叉树
1、二叉树的概念
1.1 二叉树中组分构成名词概念
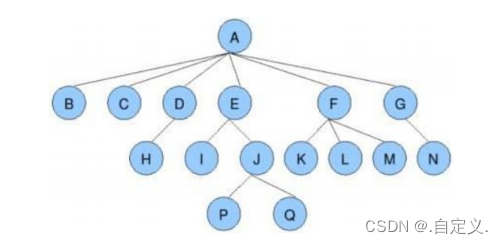
二叉树中各个组分构成名词如下:

节点的度:一个节点含有的子树的个数称为该节点的度; 如上图:A的为6。
叶节点或终端节点:度为0的节点称为叶节点; 如上图:B、C、H、I…等节点为叶节点。
非终端节点或分支节点:度不为0的节点; 如上图:D、E、F、G…等节点为分支节点。
双亲节点或父节点:若一个节点含有子节点,则这个节点称为其子节点的父节点; 如上图:A是B的父节点。
孩子节点或子节点:一个节点含有的子树的根节点称为该节点的子节点; 如上图:B是A的孩子节点。
兄弟节点:具有相同父节点的节点互称为兄弟节点; 如上图:B、C是兄弟节点。
树的度:一棵树中,最大的节点的度称为树的度; 如上图:树的度为6。
节点的层次:从根开始定义起,根为第1层,根的子节点为第2层,以此类推;
树的高度或深度:树中节点的最大层次; 如上图:树的高度为4。
堂兄弟节点:双亲在同一层的节点互为堂兄弟;如上图:H、I互为兄弟节点。
节点的祖先:从根到该节点所经分支上的所有节点;如上图:A是所有节点的祖先。
子孙:以某节点为根的子树中任一节点都称为该节点的子孙。如上图:所有节点都是A的子孙。
森林:由m(m>0)棵互不相交的树的集合称为森林;
1.2 二叉树的结构概念
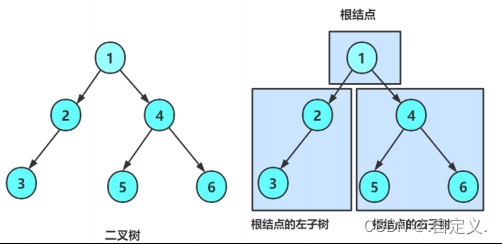
一棵二叉树是结点的一个有限集合,该集合:
1. 或者为空。
2. 由一个根节点加上两棵别称为左子树和右子树的二叉树组成。
 从上图中可以看出来:
从上图中可以看出来:
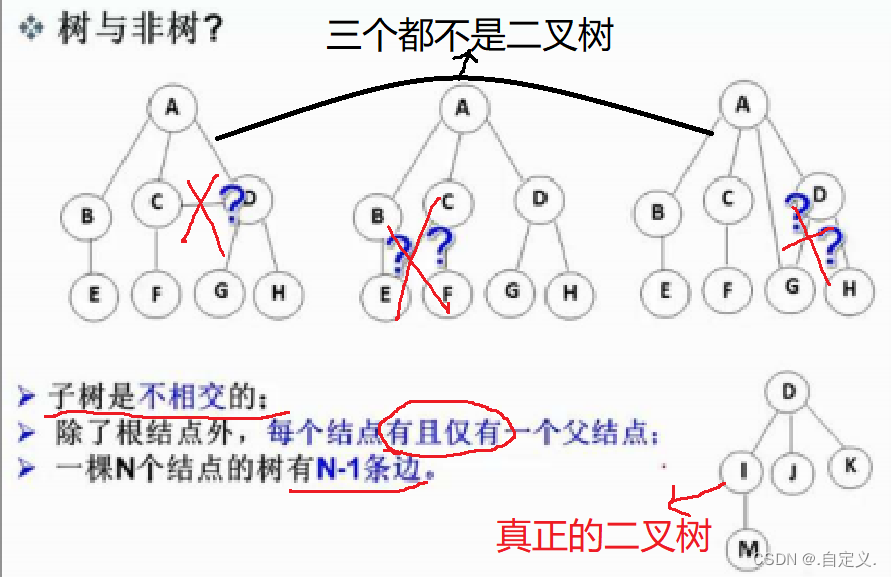
1. 二叉树不存在度大于2的结点。
3. 二叉树的子树有左右之分,次序不能颠倒,因此二叉树是有序树。
注意:对于任意的二叉树都是由以下几种情况复合而成的:
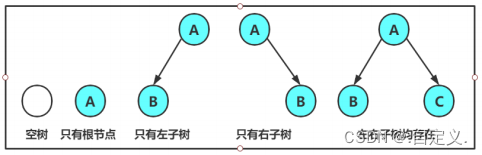
1.3 特殊的二叉树
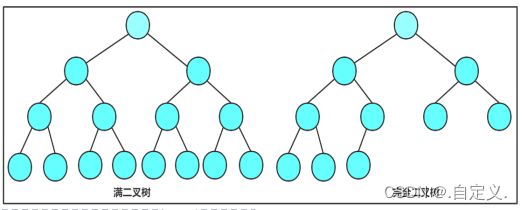
1. 满二叉树:一个二叉树,如果每一个层的结点数都达到最大值,则这个二叉树就是满二叉树。也就是说,如果一个二叉树的层数为K,且结点总数是 ,则它就是满二叉树。
2. 完全二叉树:完全二叉树是效率很高的数据结构,完全二叉树是由满二叉树而引出来的。对于深度为K的,有n个结点的二叉树,当且仅当其每一个结点都与深度为K的满二叉树中编号从1至n的结点一一对应时称之为完全二叉树。 要注意的是满二叉树是一种特殊的完全二叉树。
2、二叉树的存储结构
二叉树一般可以使用两种结构存储,一种顺序结构,一种链式结构。
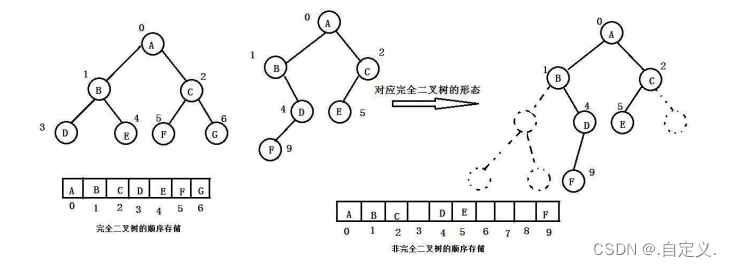
2.1 顺序存储
顺序结构存储就是使用数组来存储,一般使用数组只适合表示完全二叉树,因为不是完全二叉树会有空间的浪费。
**二叉树顺序存储在物理上是一个数组,在逻辑上是一颗二叉树。
而在实际使用中只有堆**才会使用数组来存储。(下一篇我会对堆进行讲解实现)
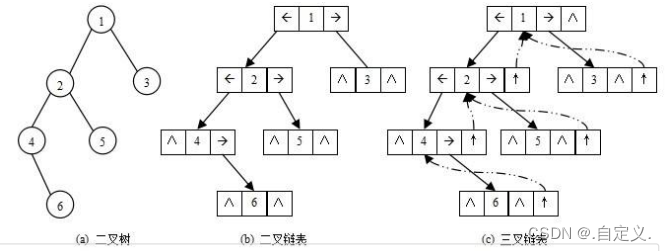
2.2 链式存储
二叉树的链式存储结构是指用链表来表示一棵二叉树,即用链表来指示元素的逻辑关系。
通常的方法是链表中每个结点由三个域组成,数据域和左右指针域,左右指针分别用来给出该结点左孩子和右孩子所在的链结点的存储地址 。
链式结构又分为二叉链和三叉链,当前我们学习中一般都是二叉链,后面课程学到高阶数据结构如红黑树等会用到三叉链。

 链式结构代码:
链式结构代码:
typedef int BTDataType;
// 二叉链
struct BinaryTreeNode
{struct BinTreeNode* _pLeft;// 指向当前节点左孩子 struct BinTreeNode* _pRight; // 指向当前节点右孩子BTDataType _data; // 当前节点值域
}// 三叉链
struct BinaryTreeNode
{struct BinTreeNode* _pParent; // 指向当前节点的双亲struct BinTreeNode* _pLeft; // 指向当前节点左孩子struct BinTreeNode* _pRight; // 指向当前节点右孩子BTDataType _data; // 当前节点值域
};
这里对于三叉树我们只做了解即可。
下一篇博客我会对二叉树顺序(堆),链序的整体实现及应用进行讲解,大家尽情期待。
二、二叉树的性质
- 若规定根节点的层数为1,则一棵非空二叉树的第i层上最多有2^(i-1)个结点。
- 若规定根节点的层数为1,则深度为h的二叉树的最大结点数是2^h-1个。
- 对任何一棵二叉树, 如果度为0其叶结点个数为N0 , 度为2的分支结点个数为N2,则有N0=N2+1。
- 若规定根节点的层数为1,具有n个结点的满二叉树的深度,h=log2(n+1) . (ps: 是log以2为底,n+1为对数)。
- 对于具有n个结点的完全二叉树,如果按照从上至下从左至右的数组顺序对所有节点从0开始编号,则对于序号为i的结点有:
1)若i>0,i位置节点的双亲序号:(i-1)/2;i=0,i为根节点编号,无双亲节点。
2)若2i+1<n,左孩子序号:2i+1,2i+1>=n则无左孩子。
3)若2i+2<n,右孩子序号:2i+2,2i+2>=n则无右孩子。
三、完结撒❀
如果以上内容对你有帮助不妨点赞支持一下,以后还会分享更多编程知识,我们一起进步。
最后我想讲的是,据说点赞的都能找到漂亮女朋友❤
