网站建设公司用的什么后台全球最大的设计网站
这里写目录标题
- 1.冯诺依曼体系
- 2.CPU是怎么构成的
- 3.指令表
- 4.CPU执行代码的方式
- 5.CPU小结:
- 6.编程语言和操作系统
- 7. 进程/任务(Process/Task)
- 8.进程在系统中是如何管理的
- 9. CPU分配 -- 进程调度
- 10.内存分配 -- 内存管理
- 11.进程间通信
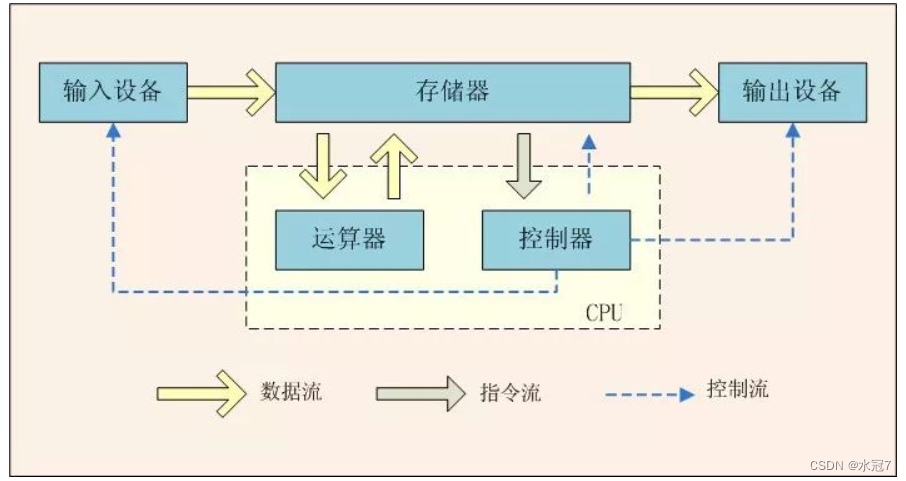
1.冯诺依曼体系
- CPU中央处理器:进行算术运算和逻辑判断。
- 存储器:分为外存和内存,用于存储数据(二进制存储)
- 输入设备:用户给计算机发送指令的设备
- 输出设备:计算机给用户汇报结果的设备
 针对存储空间访问速度:硬盘>内存>>CPU
针对存储空间访问速度:硬盘>内存>>CPU
针对数据访问速度:CPU>>内存>硬盘
2.CPU是怎么构成的
门电路 => 半加速 => 全加速 => 加法器 => ALU运算器(ALU是计算机中进行算数,逻辑运算的核心部件,是计算机的数学大脑)。
CPU以及其他的内存、硬盘等重要的设备都是由 门电路构成的。
3.指令表
- 指令(instruction) | 功能说明4位opcode | 操作的地址或者寄存器
- LOAD_A : 从RAM 的指定地址,将数据加载到A 寄存器。0010; 4 位RAM 地址
- LOAD_B :从RAM 的指定地址,将数据加载到B 寄存器0001 ;4 位RAM 地址
- STORE_A:将数据从A 寄存器写入RAM 的指定地址,0100; 4 位RAM 地址
- ADD:计算两个指定寄存器的数据的和,并将结果放入第二个寄存器
1000; 2 位的寄存器ID,2 位的寄存器ID
寄存器:是CPU上存储数据的单元。CPU上能直接存的数据比较少,这些寄存器主要是为了支持CPU完成一些计算,保存中间结果的。
4.CPU执行代码的方式
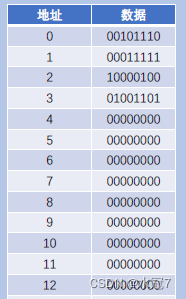
上面一段指令,其实就是内存中的一段数据;写好的代码最终要运行的话都需要让操作系统,先把写好并编译好的指令加载到内存中,然后CPU才能执行。
-
假如从0号地址开始执行程序:CPU就会从0号地址读取数据,到CPU寄存器里,并且对这个指令进行解析(即查指令表,看指令的具体操作)。
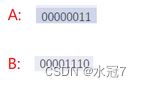
 前4位(0010)是opcode参数(即查指令表):LOAD A:从内存中读取数据到A寄存器中。后4位(1110)是内存地址,十进制的14。
前4位(0010)是opcode参数(即查指令表):LOAD A:从内存中读取数据到A寄存器中。后4位(1110)是内存地址,十进制的14。 -
CPU 接着从内存中,读取指令并解析:
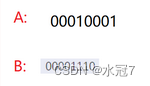
 0001:LOAD B,1111:就是15号内存地址。
0001:LOAD B,1111:就是15号内存地址。
- CPU接着从3地址读取指令:
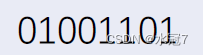
 1000:为add,01为B,00为A,A寄存器的编号是00,B的编号是01,而这些都是指令表里提前约定好的。把**这两个寄存器的内容进行相加,结果保存到第二个操作数(A)的寄存器中
1000:为add,01为B,00为A,A寄存器的编号是00,B的编号是01,而这些都是指令表里提前约定好的。把**这两个寄存器的内容进行相加,结果保存到第二个操作数(A)的寄存器中
- CPU接着读取3号地址的指令,
 ** 0100:STORE A,1101:13地址;把A寄存器中的值,写入到13这个地址上。**
** 0100:STORE A,1101:13地址;把A寄存器中的值,写入到13这个地址上。**
5.CPU小结:
- CPU要执行的指令,是在内存中的(冯诺依曼结构的基本设定让执行单元和存储单元进行了 解耦合)
- ** CPU想要执行指令,必须先读取指令,再解析指令,然后才能执行指令**
- 取指令需要从内存中读取指令到CPU的寄存器中(上面CPU读取解析和执行指令没有体现出存储指令的寄存器,只体现了AB用来计算数据的寄存器);因为读取内存操作相对于CPU执行计算,开销大很多,所以读取指令的操作,是非常耗时的,因此,CPU通过缓存,流水线等技术来优化这里的效率。
- CPU解析指令的时候,需要用到指令表,而不同架构的CPU支持的指令表不同(x86和arm等是不同的);指令表细节已经写死到CPU中了,CPU是可以很容易识别的
- 指令在执行过程中,可能会带有一些操作数,不同的指令,操作数的个数含义都有所不同
- CPU重要的参数,主频:表示的含义就可以近似看成一秒中之内,CPU能够执行的指令个数
6.编程语言和操作系统
- 编程语言:高级语言经过编译、链接 =》汇编语言 经过汇编 =》机器语言。
高级语言的一条语句往往对应多条指令才能完成。
- 操作系统:是一组做计算机资源管理的软件的统称。
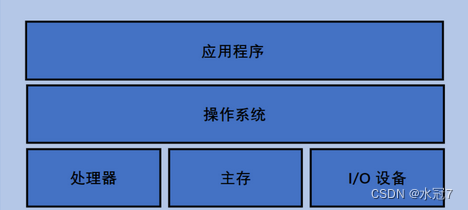
- 计算机系统的分层视图:
7. 进程/任务(Process/Task)
- 进程就是操作系统提供的一种“软件资源”,比如我们电脑正在运行的程序,就可以称为是”任务“,也叫进程,而我们现在所用的系统,都属于多任务操作系统,即同一时刻可以运行多个任务。
- 而单任务操作系统,同一时刻只能运行一个程序,比如以前的山寨机,单任务系统就是没有后台运行,要执行另一个程序,就需要先退出前一个程序。
- 每个任务在执行过程中,都需要消耗一定的硬件资源,计算机中的每个进程在运行的时候,都需要给他分配一定的系统资源,进程是系统分配资源的基本单位。
8.进程在系统中是如何管理的
操作系统的进程管理:
- 先描述,即使用类/结构体这样的方式,把实体属性给列出来,表进程信息的结构体,PCB(进程控制块,Process Control Block),PCB是操作系统中的通用概念,比如Windows上表进程的结构和Linux也都可以称为PCB。
- 再组织,即使用一定的数据结构,把这些结构体/对象串到一起。在Linux中,使用链表这样的数据结构来把若干个task_struct串起来。
PCB中的一些核心属性:
- pid,进程的身份标识。此处通过一个简单的不重复的整数来进行区分的,系统会保证,同一个机器上,同一个时刻,每个进程pid都是唯一的。
- 内存指针,描述了进程使用,内存资源的详细情况。进程运行过程中,需要消耗一些系统资源的,其中内存就是一种重要的资源。而整个系统中,内存这么多,并不是可以随意使用的,只有先从系统这里申请,系统给你分配一块才能使用。每个内存,都必须使用自己申请到的内存。
- 列如双击一个exe,就会运行进程,这个过程中,就是系统先把exe这个文件的内容(包含了指令和数据,先加载到内存中)然后再创建进程,让进程开始执行。
- 文件描述符表:描述了这个进程所涉及的硬盘相关的资源。存储器 = 内存+外存(硬盘、软盘、光盘、U盘。。),操作系统,不管什么盘都是按照”文件“的方式来进行操作的。一个进程想要操作文件,需要先打开文件,即让进程在文件描述符表中分配一个表项(构造一个结构体)表示这个文件的相关信息。
注意:进程,是系统分配资源的基本单位。
一个进程,消耗CPU资源:就好比CPU是个大舞台,进程要执行的指令,就是演员;一个CPU可能有一个核心,也可能有多个核心,每个核心都是舞台,演员进行表演登上舞台才能表演,同一时刻,一个舞台,只能有一个演员,让多个演员轮流登台,即引出分时复用。即某电脑的CPU有16个逻辑核心,系统上的进程不止16个,其他进程分不到CPU资源,通过分时复用(并发)。
- 分时复用:当CPU核心只有一个,先执行进程1的代码,执行一会后,让进程1下来,执行进程2的代码,以此类推。
- 并发:多核CPU下,四个不同的进程在各自舞台上执行,同时执行,称为并行执行。每个核心仍要分时复发。当代的计算机执行过程中,往往是并行+并发同时存在。而两个进程是并发执行还是并行执行要看系统的调度。
9. CPU分配 – 进程调度
PCB中就需要提供一些属性来支持系统完成对这些进程的调度。
- 状态:描述进程的是否能够去CPU上执行 。有时候某个进程不方便,比如通过Scanner等待用户输入内容。
1.就绪状态:随时准备好去CPU上执行。2,阻塞状态:这个进程不方便去CPU上执行,调度不了该进程(如进程等待IO,来自控制台等设备的输入输出),。 - 优先级:多个进程等待系统调度,调度的先后不一样。如电脑运行了游戏和qq,此时游戏的优先级大于qq。
- 记账信息:针对每个进程,占据了多少CPU的时间,进行一个统计,会根据这个统计结果来进一步的调整调度的策略。因此需要在下一轮的调度下进行调整,确保每个进程都不至于出现完全捞不着CPU的情况。
- 上下文:支撑进程调度的重要属性,相当于游戏里面的存档和读档。每个进程在运行过程中,就会有很多的中间结果,在CPU的寄存器中。1.存档:因此,就需要在进程调度出CPU之前,把当前寄存器中的这些信息,给单独保存到一个地方。2.存档:在该进程下次去CPU执行的时候,再把这些寄存器里的信息给恢复回来。
- 所谓的保存上下文就是:把CPU的关键寄存器中的数据,保存到内存中(PCB的上下文属性中)。
- 恢复上下文:把内存中的关键寄存器中的数据,加载到CPU的对应寄存器。
10.内存分配 – 内存管理
每个进程的内存,是彼此独立的,互不干扰的。
- 通常情况下,进程A不能直接访问进程B的内存;为了系统的稳定性,如果某个进程代码出bug出错的,只是影响到自己这个进程,不会影响到其他进程,这种情况也称为进程的独立性。而如果系统上的一个进程崩溃,会影响了其他进程,那将非常恐怖。
11.进程间通信
虽然有进程的独立性,但是有时候也需要,多个进程相互配合,完成某个工作。
- 进程间通信和进程的‘独立性’ 并不冲突,系统提供一些 公共的空间(多个进程可以访问到的),让两个进程借助这个公共空间来交互数据。
- 进程通信的方式:
- 管道
- 共享内存
- 文件
- 网络
- 信号量
- 信号
其中,在Java中主要使用的进程通信方式:文件和网络。网络,是可以支持同一个主机的不同进程,也能支持不同主机的不同进程适用性更高。