企业网站app开发平台济南网页制作公司
前言
随着NLP预训练模型(大模型)以及多模态研究领域的发展,向量数据库被使用的越来越多。
在XOP亿级题库业务背景下,对于试题召回搜索单单靠着ES集群已经出现性能瓶颈,因此需要预研其他技术方案提高试题搜索召回率。
现一个方案就是使用Bert等模型提取试题题干特征,然后存储到向量数据库,检索试题先走向量数据库,拿到具体的试题ID等信息在走ES进行相似题召回,从而提高搜索的性能。需要考虑的就是特征提取的效率,Milvus的性能(比较吃服务器资源),然后进行评估。
本篇博客主要对Bert等模型以及主流的Milvus进行实践以及一些相关知识学习。
目录
- 概述
- 实践
- 原理分析
一、概述
https://milvus.io/
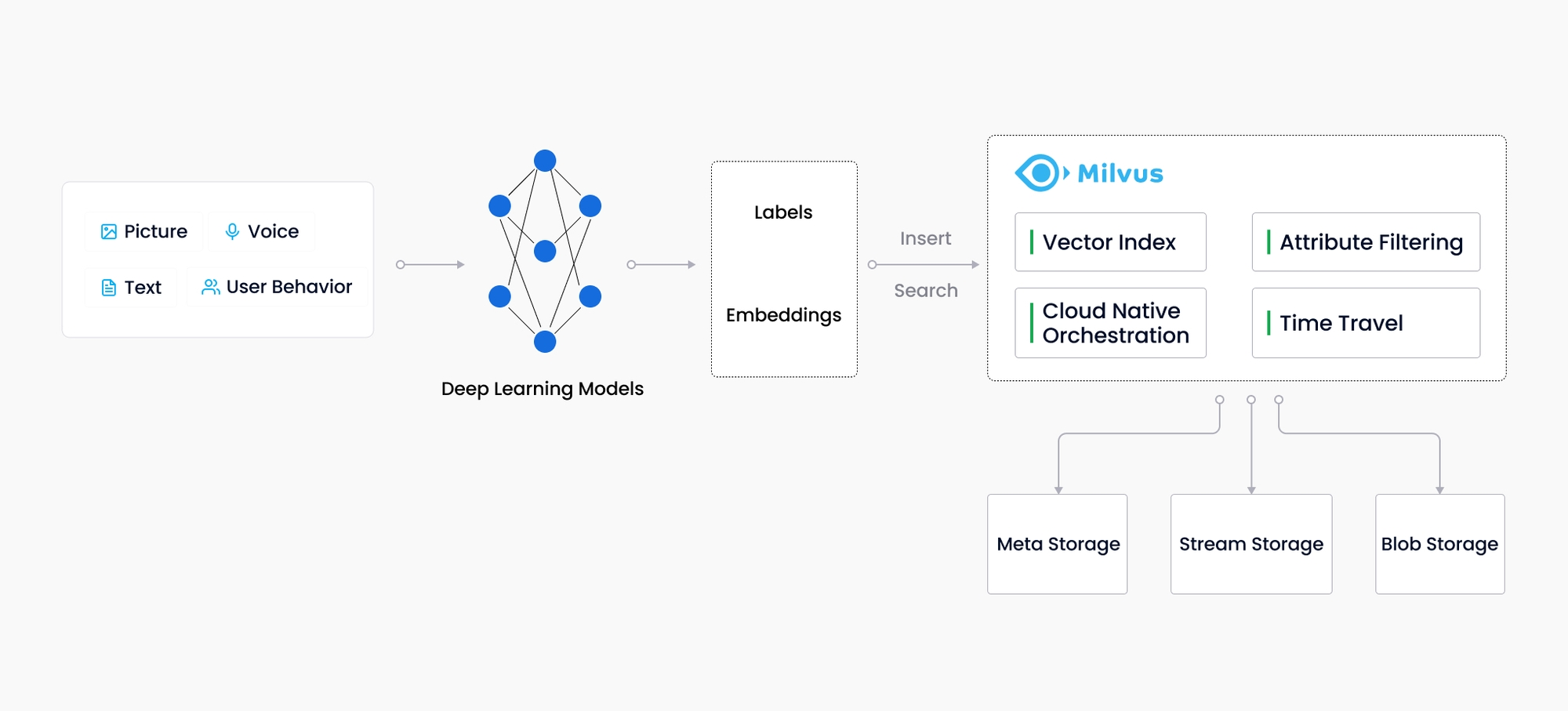
Milvus创建于2019年,其唯一目标是:存储、索引和管理由深度神经网络和其他机器学习(ML)模型生成的大量嵌入向量。
作为一个专门设计用于处理输入向量查询的数据库,它能够索引万亿级的向量。与现有的关系数据库主要处理遵循预定义模式的结构化数据不同,Milvus是自底向上设计的,用于处理从非结构化数据转换而来的嵌入向量Embedding Vector。
基础概念
- 标量:无向量,只有数值大小没有方向
- 向量:区别于具体的单维度数值标量,可以认为是一条线,有多个数值表示。嵌入向量Embedding Vector是非结构化数据的特征抽象,例如电子邮件、物联网传感器数据、Instagram照片、蛋白质结构等等。从数学上讲,嵌入向量是一个浮点数数组或二进制数组。
- 向量范数:向量范数是指向量的大小或长度,计算向量范式可以用来衡量向量的大小、相似度等。计算方式分为
- L1:曼哈顿范数,将向量元素绝对值相加之和
- L2:欧几里得范数,将向量元素的平房和开更号
- 向量归一化:对向量进行归一化操作,以确保不同维度上的特征权重相等,避免某些维度对结果产生较大影响。可以采用L1、L2归一化,一种常用的归一化方法是使用 L2 范数进行单位化处理,即将向量除以其 L2 范数得到单位向量。
- 向量内积:点积、数量积,两个向量的点积就是吧对应位置元素点积之和,对于某个位置元素的点积a · b = |a|·|b|·cos v。其中||表示向量范数。点乘的几何意义是可以用来表征或计算两个向量之间的夹角,以及在b向量在a向量方向上的投影。
- 向量外积:外积(英语:Outer product),在线性代数中一般指两个向量的张量积,其结果为一矩阵;与外积相对,向量的外积是矩阵的克罗内克积的特殊情况。
- 余弦相似度:向量之间的夹角的余弦值,范围为[-1,1],越接近1表示两个向量越来约相似。
https://oi-wiki.org/math/linear-algebra/product/
数据模型相关概念
- Bitset:位图集合
- Channel:有两个不同的Channel在Milvus。它们是PChannel和VChannel。
- 每个PChannel对应一个日志存储主题。PChannel是物理Channel。每个PChannel对应一个日志存储主题。当Milvus集群启动时,默认情况下将分配一组256个PChannels来存储记录数据插入、删除和更新的日志。
- 每个VChannel对应于集合中的一个分片。VChannel代表逻辑信道。每个VChannel代表集合中的一个分片。每个集合将被分配一组VChannels,用于记录数据插入、删除和更新。VChannel在逻辑上是分离的,但在物理上共享资源。
- Collection:数据实体集合,类比表
- Schema:集合模式,模式是定义数据类型和数据属性的Meta信息。每个集合都有自己的集合模式,该模式定义集合的所有字段、自动ID(主键)分配启用和集合描述。集合架构中还包括定义字段的名称、数据类型和其他属性的字段架构。
- Entity:数据实体,每个实体会有一个主键。
- Field:数据字段,类型可以是数字、字符串、向量等结构化数据。
- Normalization:归一化,归一化是指转换嵌入(向量)以使其范数等于1的过程。如果使用内积(IP)来计算嵌入相似度,则所有嵌入都必须归一化。归一化后,内积等于余弦相似度。
- Vector index:向量索引是从原始数据中派生出来的重组数据结构,可以大大加速向量相似性搜索的过程。Milvus支持多种向量索引类型。
- Vector similarity search:向量相似性搜索是将向量与数据库进行比较以找到与目标搜索向量最相似的向量的过程。近似最近邻(ANN)搜索算法用于计算向量之间的相似性。
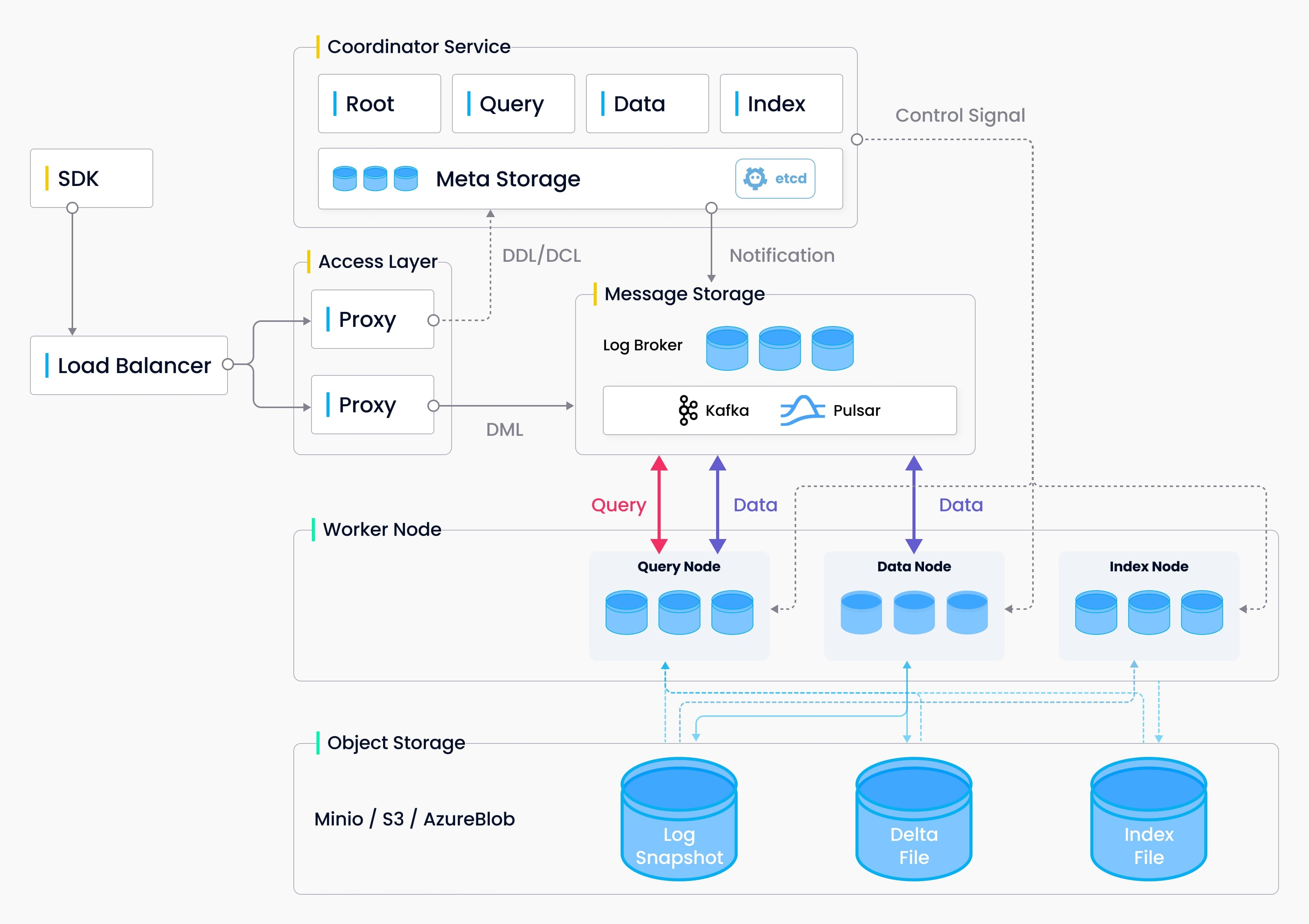
系统设计概念,作为云原生矢量数据库,Milvus通过设计将存储和计算分离。为了增强弹性和灵活性,Milvus中的所有组件都是无状态的。
- 接入层:提供访问的API
- 协调服务:大脑,将任务分配给工作节点
- 工作节点:四肢,执行大脑下发的DML命令
- 存储服务:骨骼,负责数据持久化。它包括Meta存储、日志代理和对象存储。
相关概念
- Message storage:消息存储是Milvus的日志存储引擎。
- Dependency:其他依赖,Milvus的依赖项包括etcd(存储Meta数据),MinIO或S3(对象存储)和Pulsar(管理快照日志)。
- Milvus cluster:在Milvus的集群部署中,服务由一组节点提供,以实现高可用性和易扩展性。
- Partition:分区是集合的物理划分。Milvus支持将收集数据划分为物理存储上的多个部分。这个过程称为分区,每个分区可以包含多个段。
- Segment:段是由Milvus自动创建的用于保存插入数据的数据文件。一个集合可以有多个段,一个段可以有多个实体。在向量相似性搜索期间,Milvus扫描每个片段并返回搜索结果。段可以是增长的,也可以是密封的。一个不断增长的段不断接收新插入的数据,直到它被密封。密封的段不再接收任何新数据,并将被刷新到对象存储中,留下新数据插入到新创建的增长段中。增长段将被密封,因为它持有的实体数量达到预定义的阈值,或者因为“增长”状态的跨度超过指定的限制。
- Sharding:分片是指将写操作分配到不同的节点(一个节点可以存储多个分区),以充分利用Milvus集群的并行计算潜力来写数据。默认情况下,单个集合包含两个分片。Milvus采用基于主键哈希的分片方法。Milvus的开发路线图包括支持更灵活的分片方法,如随机和自定义分片。
日志相关概念
- Log Broker:日志代理,支持回放的系统,负责流数据持久化、可靠的异步查询、事件通知和返回查询结果以及当工作节点故障恢复后增量数据的完整性。
- Log sequence:日志序列,记录更改集合状态的所有操作。
- Log snapshot:日志快照,二进制日志,一个较小的段单元,记录和处理对Milvus矢量数据库中数据的更新和更改。来自一个段的数据被持久化在多个binlog中。Milvus中有三种类型的binlog:InsertBinlog、DeleteBinlog和DDLBinlog。
- Log subscriber:日志订阅者订阅日志序列以更新本地数据,并以只读副本的形式提供服务。
二、实践
2.1、安装Milvus服务
因为是云原生的设计架构,安装可以使用k8s、docker compose安装:https://milvus.io/docs/prerequisite-helm.md,内存至少8g,配置挂在目录以及端口:https://milvus.io/docs/configure-docker.md
也可以使用普通安装方式
# Install Milvus
sudo yum https://github.com/milvus-io/milvus/releases/download/v2.0.0-pre-ga/milvus-2.0.0-preGA.1.el7.x86_64.rpm# Check Milvus status
sudo systemctl status milvus
sudo systemctl status milvus-etcd
sudo systemctl status milvus-minio
或者直接使用Python安装轻量级的Milvus Lite,Milvus Lite是Milvus的轻量级版本,可与Google Colab和Google Notebook无缝协作。https://milvus.io/docs/milvus_lite.md
// 安装docker以及docker-compose插件// 下载yml
wget https://github.com/milvus-io/milvus/releases/download/v2.3.3/milvus-standalone-docker-compose.yml -O docker-compose.yml// 启动
docker-compose up -d// 查看启动状态
docker compose ps// 关闭
docker compose down
2.2、安装可视化界面
https://github.com/zilliztech/attu,可以下载桌面版 or docker or k8s
2.3、使用Milvus
SDK支持Python、Java、Go、Nodejs,Python的SDK相对功能完善,其他语言的还在活跃的开发中,https://milvus.io/docs/install-pymilvus.md
1、使用Python SDK
// 安装依赖
python -m pip install pymilvus==2.3.32、使用Java SDK
https://github.com/milvus-io/milvus-sdk-java
https://milvus.io/api-reference/java/v2.3.x/About.md
<dependency><groupId>io.milvus</groupId><artifactId>milvus-sdk-java</artifactId><version>2.3.3</version>
</dependency>使用流程
- 创建数据库:与传统的数据库引擎类似,您也可以在Milvus中创建数据库,并将权限分配给某些用户来管理它们。然后,这些用户有权管理数据库中的集合。Milvus集群最多支持64个数据库。默认存在数据库default。
- 创建集合:集合由一个或多个分区组成。在创建新集合时,如果不指定分区数,Milvus会创建一个默认的partition分区_default。创建集合之前需要指定元数据,支持为标量设置默认值。创建集合可以指定分片数量,相比分区,分区通过指定分区名称来减少读取负载,而分片在多个服务器之间分散写入负载。
- 创建索引:需要指定为某向量字段、普通标量创建索引的类型(标量默认索引类型为字典树),额外参数传入聚类参数nlist。比如IVF_FLAT索引将向量数据划分为nlist聚类单元,然后比较目标输入向量与每个聚类中心之间的距离。根据系统设置为查询的聚类数(nprobe),仅基于目标输入和最相似聚类中的向量之间的比较返回相似性搜索结果-大大减少查询时间。
- 加载集合:将集合、集合分区加载进内存,Milvus2.1允许用户将集合按照分区加载为多个副本,以利用额外查询节点的CPU和内存资源。此功能可提高整体QPS和吞吐量,无需额外硬件。
- 插入数据:可以指定partition_name将数据插入指定分区,可以将文件中的实体数据插入集合,支持manualCompaction手动压缩数据
- 搜索数据:根据创建的向量索引以及指定的相似度度量参数(IP、L2等)来进行相似性索引、标量搜素。
数据字段类型
| Type | Description |
|---|---|
| None | For internal usage. |
| Bool | Boolean. |
| Int8 | Integer number stored with 8 bit. |
| Int16 | Integer number stored with 16 bit. |
| Int32 | Integer number stored with 32 bit. |
| Int64 | Integer number stored with 64 bit. |
| Float | Floating-point numbers. |
| Double | 64-bit IEEE 754 floating point numbers. |
| String | Reserved. Do not use this. |
| VarChar | Variable-length string with a limit on the maximum length. |
| BinaryVector | Binary vector. Each dimension is represented by 1 bit. |
| FloatVector | Float vector. Each dimension is represented by 1 float (4 bits) value. |
动态数据类型
为了使Milvus插入数据更加灵活,对于之前创建的集合可以指定动态元数据模式。
动态模式使用户能够将具有新字段的实体插入到Milvus集合中,而无需修改现有模式。这意味着用户可以在不知道集合的完整架构的情况下插入数据,并且可以包括尚未定义的字段。
索引类型
ANN紧邻搜索的索引实现的几种方式
- Tree-based index
- Graph-based index
- Hash-based index
- Quantization-based index
在Milvus中根据数据类型将向量索引种类分为
- 内存索引
- 浮点嵌入索引
- 二进制嵌入索引
- 标量前缀索引
- 磁盘索引:默认启用DiskANN,可选择关闭。
https://milvus.io/api-reference/java/v2.3.x/Misc/IndexType.md
| INVALID | For internal usage. |
|---|---|
| FLAT | Only for FloatVector type field. |
| IVF_FLAT | Only for FloatVector type field. |
| IVF_SQ8 | Only for FloatVector type field. |
| IVF_PQ | Only for FloatVector type field. |
| HNSW | Only for FloatVector type field. |
| ANNOY | Only for FloatVector type field. |
| DISKANN | Only for FloatVector type field. |
| BIN_FLAT | Only for BinaryVector type field. |
| BIN_IVF_FLAT | Only for BinaryVector type field. |
| TRIE | Only for VARCHAR type field. |
聚类近似搜索
其中IVF_FLAT、IVF_SQ8、IVF_PQ、BIN_FLAT等索引创建的时候支持 nlist,查询时候支持nporbe参数,将向量数据划分为nlist聚类单元,然后比较目标输入向量与每个聚类中心之间的距离。根据系统设置为查询的聚类数(nprobe),仅基于目标输入和最相似聚类中的向量之间的比较返回相似性搜索结果-大大减少查询时间。
聚类单元是指进行聚类分析时,将数据点划分为不同的簇或群组的基本单位。每个聚类单元代表一个特定的数据集合,其内部的数据点在某种程度上相似。聚类算法通过计算各个数据点之间的距离或相似性来确定如何将它们分配到不同的聚类单元中。
聚类单元可以用于对数据进行分类、识别隐藏的模式和结构,并产生有关数据集的洞察力。利用聚类单元可以将复杂的数据集简化为更易理解和解释的形式,同时可作为进一步分析、预测和决策制定的基础。
相似度量规则
| Type | Description |
|---|---|
| INVALID | For internal usage. |
| L2 | Euclidean distance. Only for float vectors. |
| IP | Inner product. Only for normalized float vectors. |
| COSINE | Cosine Similarity. Only for normalized float vectors. |
| HAMMING | Only for binary vectors. |
| JACCARD | Only for binary vectors. |
| TANIMOTO | Only for binary vectors. |
代码demo
具体的API参考官网文档下面举例向量+标量的混合搜索demo
milvusClient.loadCollection(LoadCollectionParam.newBuilder().withCollectionName("book").build()
);final Integer SEARCH_K = 2;
final String SEARCH_PARAM = "{\"nprobe\":10, \”offset\”:5}";
List<String> search_output_fields = Arrays.asList("book_id");
List<List<Float>> search_vectors = Arrays.asList(Arrays.asList(0.1f, 0.2f));SearchParam searchParam = SearchParam.newBuilder().withCollectionName("book").withMetricType(MetricType.L2).withOutFields(search_output_fields).withTopK(SEARCH_K).withVectors(search_vectors).withVectorFieldName("book_intro").withExpr("word_count <= 11000").withParams(SEARCH_PARAM).build();
R<SearchResults> respSearch = milvusClient.search(searchParam);
Python SDK demo
// 执行demo代码
# hello_milvus.py demonstrates the basic operations of PyMilvus, a Python SDK of Milvus.
# 1. connect to Milvus
# 2. create collection
# 3. insert data
# 4. create index
# 5. search, query, and hybrid search on entities
# 6. delete entities by PK
# 7. drop collection
import timeimport numpy as np
from pymilvus import (connections,utility,FieldSchema, CollectionSchema, DataType,Collection,
)fmt = "\n=== {:30} ===\n"
search_latency_fmt = "search latency = {:.4f}s"
num_entities, dim = 3000, 8#################################################################################
# 1. connect to Milvus
# Add a new connection alias `default` for Milvus server in `localhost:19530`
# Actually the "default" alias is a buildin in PyMilvus.
# If the address of Milvus is the same as `localhost:19530`, you can omit all
# parameters and call the method as: `connections.connect()`.
#
# Note: the `using` parameter of the following methods is default to "default".
print(fmt.format("start connecting to Milvus"))
connections.connect("default", host="localhost", port="19530")has = utility.has_collection("hello_milvus")
print(f"Does collection hello_milvus exist in Milvus: {has}")#################################################################################
# 2. create collection
# We're going to create a collection with 3 fields.
# +-+------------+------------+------------------+------------------------------+
# | | field name | field type | other attributes | field description |
# +-+------------+------------+------------------+------------------------------+
# |1| "pk" | VarChar | is_primary=True | "primary field" |
# | | | | auto_id=False | |
# +-+------------+------------+------------------+------------------------------+
# |2| "random" | Double | | "a double field" |
# +-+------------+------------+------------------+------------------------------+
# |3|"embeddings"| FloatVector| dim=8 | "float vector with dim 8" |
# +-+------------+------------+------------------+------------------------------+
fields = [FieldSchema(name="pk", dtype=DataType.VARCHAR, is_primary=True, auto_id=False, max_length=100),FieldSchema(name="random", dtype=DataType.DOUBLE),FieldSchema(name="embeddings", dtype=DataType.FLOAT_VECTOR, dim=dim)
]schema = CollectionSchema(fields, "hello_milvus is the simplest demo to introduce the APIs")print(fmt.format("Create collection `hello_milvus`"))
hello_milvus = Collection("hello_milvus", schema, consistency_level="Strong")################################################################################
# 3. insert data
# We are going to insert 3000 rows of data into `hello_milvus`
# Data to be inserted must be organized in fields.
#
# The insert() method returns:
# - either automatically generated primary keys by Milvus if auto_id=True in the schema;
# - or the existing primary key field from the entities if auto_id=False in the schema.print(fmt.format("Start inserting entities"))
rng = np.random.default_rng(seed=19530)
entities = [# provide the pk field because `auto_id` is set to False[str(i) for i in range(num_entities)],rng.random(num_entities).tolist(), # field random, only supports listrng.random((num_entities, dim)), # field embeddings, supports numpy.ndarray and list
]insert_result = hello_milvus.insert(entities)# 测试打印
for x in range(3):print(entities[x])hello_milvus.flush()
print(f"Number of entities in Milvus: {hello_milvus.num_entities}") # check the num_entities################################################################################
# 4. create index
# We are going to create an IVF_FLAT index for hello_milvus collection.
# create_index() can only be applied to `FloatVector` and `BinaryVector` fields.
print(fmt.format("Start Creating index IVF_FLAT"))
index = {"index_type": "IVF_FLAT","metric_type": "L2","params": {"nlist": 128},
}hello_milvus.create_index("embeddings", index)################################################################################
# 5. search, query, and hybrid search
# After data were inserted into Milvus and indexed, you can perform:
# - search based on vector similarity
# - query based on scalar filtering(boolean, int, etc.)
# - hybrid search based on vector similarity and scalar filtering.
## Before conducting a search or a query, you need to load the data in `hello_milvus` into memory.
print(fmt.format("Start loading"))
hello_milvus.load()# -----------------------------------------------------------------------------
# search based on vector similarity
print(fmt.format("Start searching based on vector similarity"))
vectors_to_search = entities[-1][-2:]
search_params = {"metric_type": "L2","params": {"nprobe": 10},
}start_time = time.time()
result = hello_milvus.search(vectors_to_search, "embeddings", search_params, limit=3, output_fields=["random"])
end_time = time.time()for hits in result:for hit in hits:print(f"hit: {hit}, random field: {hit.entity.get('random')}")
print(search_latency_fmt.format(end_time - start_time))# -----------------------------------------------------------------------------
# query based on scalar filtering(boolean, int, etc.)
print(fmt.format("Start querying with `random > 0.5`"))start_time = time.time()
result = hello_milvus.query(expr="random > 0.5", output_fields=["random", "embeddings"])
end_time = time.time()print(f"query result:\n-{result[0]}")
print(search_latency_fmt.format(end_time - start_time))# -----------------------------------------------------------------------------
# pagination
r1 = hello_milvus.query(expr="random > 0.5", limit=4, output_fields=["random"])
r2 = hello_milvus.query(expr="random > 0.5", offset=1, limit=3, output_fields=["random"])
print(f"query pagination(limit=4):\n\t{r1}")
print(f"query pagination(offset=1, limit=3):\n\t{r2}")# -----------------------------------------------------------------------------
# hybrid search
print(fmt.format("Start hybrid searching with `random > 0.5`"))start_time = time.time()
result = hello_milvus.search(vectors_to_search, "embeddings", search_params, limit=3, expr="random > 0.5", output_fields=["random"])
end_time = time.time()for hits in result:for hit in hits:print(f"hit: {hit}, random field: {hit.entity.get('random')}")
print(search_latency_fmt.format(end_time - start_time))###############################################################################
# 6. delete entities by PK
# You can delete entities by their PK values using boolean expressions.
ids = insert_result.primary_keysexpr = f'pk in ["{ids[0]}" , "{ids[1]}"]'
print(fmt.format(f"Start deleting with expr `{expr}`"))result = hello_milvus.query(expr=expr, output_fields=["random", "embeddings"])
print(f"query before delete by expr=`{expr}` -> result: \n-{result[0]}\n-{result[1]}\n")hello_milvus.delete(expr)result = hello_milvus.query(expr=expr, output_fields=["random", "embeddings"])
print(f"query after delete by expr=`{expr}` -> result: {result}\n")###############################################################################
# 7. drop collection
# Finally, drop the hello_milvus collection
# print(fmt.format("Drop collection `hello_milvus`"))
# utility.drop_collection("hello_milvus")3、Bert实践
使用NLP模型对文本进行特征提,将特征向量存储到Milvus数据库,然后进行相似搜索。
参考:
-
https://www.cnblogs.com/henx/p/13802855.html
-
https://zhuanlan.zhihu.com/p/567922534
// TODO