海盐网站设计软件网站开发评估
一、HTML5的新特性
增加了一些新的标签,新的表单,新的表单属性,IE9+以上版本的浏览器才支持
注意:
这些语义化标准主要针对搜索引擎的
新标签可以使用多次
在IE9中需要把这些元素转化为块级元素
新增的多媒体标签
主要包含两个
1、音频:<audio>
2、视频:<video>
1、视频<video>

语法:
<video src="文件地址" controls="controls"></video>


谷歌浏览器把autoplay属性给我们禁用了,IE可以用
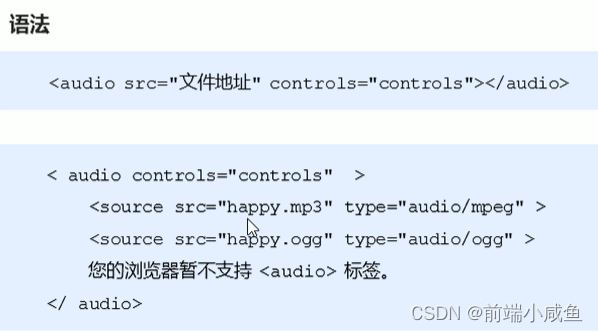
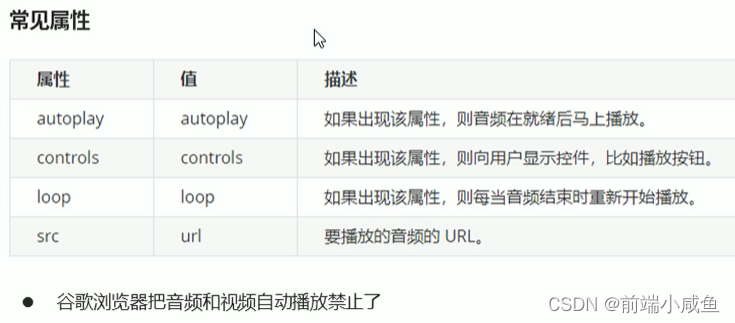
2、音频<audio>
新增的input类型

我们验证的时候必须添加表单域form,点击提交按钮就可以验证
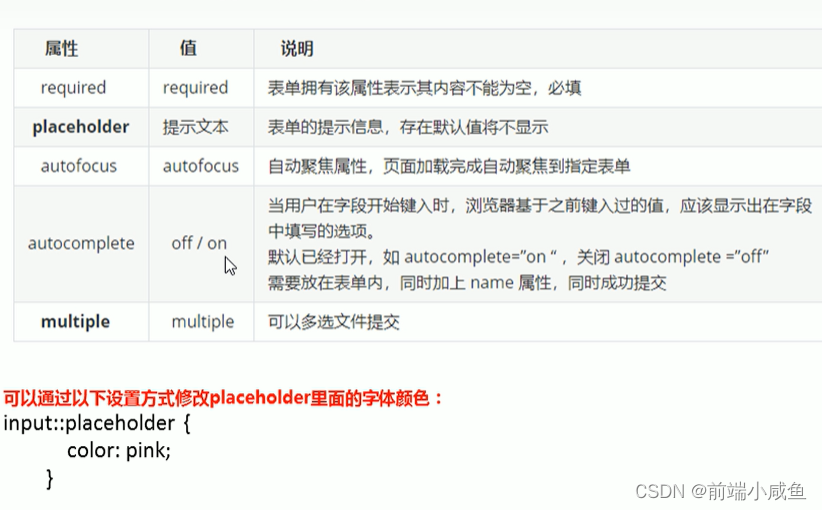
新增的表单属性
二、CSS的新特性
css新增选择器
1、属性选择器
根据元素特定属性来选择元素

2、结构伪类选择器
主要根据文档结构来选择元素,常用于父级选择器里面的子元素
nth-child(n)里面的n可以是数字(选择第n个子元素,从1开始)、关键字(even偶数,odd奇数)、公式(从0开始计算,但是第0个元素或者超出了元素的个数会被忽略)


nth-child会把所有的盒子都排列序号,执行的时候首先看 :nth-child(1) 之后回去看前面div
nth-of-type 会把指定的盒子排列序号,执行时候先看 div指定的元素 之后看 :nth-of-type(1)第几个盒子

3、伪元素选择器
帮助我们利用CSS创建新标签元素不需要HTML标签

显示隐藏遮罩案例

伪元素选择器案例


CSS盒子模型
CSS3可以通过box-sizing 来指定盒模型,有两个值:即可指定为content-box、border-box,这样计算盒子大小的方式就发生改变
1、box-sizing: content-box 盒子大小为width +padding +border (以前默认的)
2、box-sizing: border-box 盒子大小为width
如果盒子模型我们改为了box-sizing: border-box,那padding和border就不会撑大盒子(前提padding和border不会超过width宽度)
CSS3的其他特性
1、图片变模糊
CSS3滤镜filter:
filter css 属性将模糊或颜色偏移等图形效果应用于元素
filter: 函数(); 例如: filter: blur(5px);模糊处理 数值越大越模糊
2、计算盒子宽度 width:calc函数
width: calc(100%-80px);括号里面可以使用加减乘除计算
CSS3过渡 transition
过渡是CSS3中具有颠覆性的特征之一,
过渡动画:从一个状态 渐渐地过渡到另一个状态
我们现在经常和 :hover 一起搭配使用
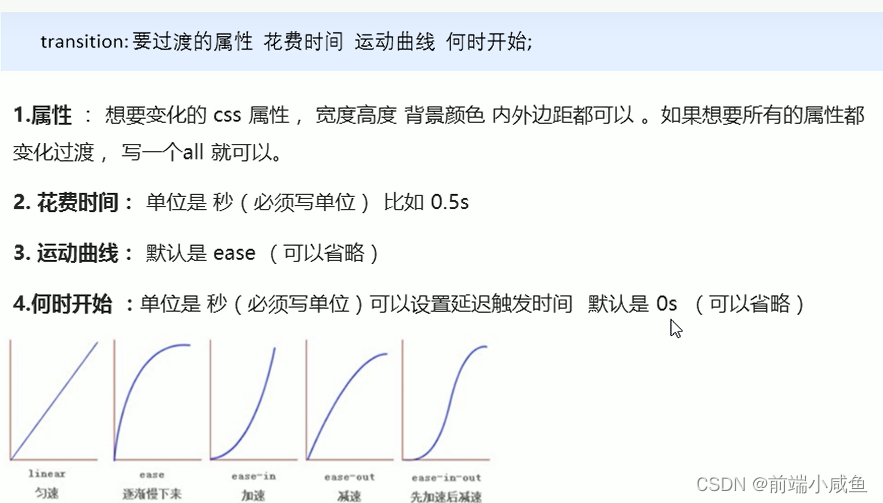
过渡使用口诀:谁做过渡给谁加
如果想要写多个属性利用逗号进行分割
三、广义的HTML5
广义的HTML5是HTML5+CSS3+JavaScript