如何建立免费公司网站网页美工设计教学设计
我会写下自己的答案和理解
希望自己可用在学习中体会到快乐,而不是麻木。
1. 网络协议三要素中语义是指 需要发出何种控制信息,完成何种动作以及做出何种响应
1.在计算机网络中要做到有条不紊的交换数据,就必须遵守一些事先约定好的规则。
这些规则明确规定了所交换的数据的格式以及有关的同步问题。
这里的同步指在一定的条件下应当发生什么事件。
2.什么是网络协议?
为进行网络中的数据交换而建立的规则,标准或约定称为网络协议。
3.网络协议三要素:
语法,数据与控制信息的结构或格式。
语义,需要发出何种控制信息,完成何种动作以及做出何种响应;
(干什么事)
假设我们要在主机中使用浏览器来访问远程的Web服务器。
浏览器会构建一个HTTP的GET请求报文。
然后将其发送给Web服务器。
Web服务器收到该报文并进行解析。
发现这是一个HTTP的GET请求报文。
于是就在自身内部查找所请求的内容。
并将所找到的内容封装在一个HTTP响应报文中。
发回给浏览器。
浏览器收到HTTP响应报文后,对其进行解析。
取出所请求的内容并由浏览器内核进行渲染。

同步,即事件实现顺序的详细说明。
TCP客户给TCP服务器发送TCP连接请求。
TCP服务器收到后给TCP客户发送针对TCP连接请求的确认。
TCP客户收到后给TCP服务器发送针对TCP连接请求确认的确认。
这其中存在着时序关系。
ps:还是没有那么弄懂。希望可以有通俗的解释。

2. 时延的组成中传播时延的含义是:
电磁波在信道中传播一定的距离需要花费的时间
传播时延=信道长度(m)/电磁波在信道上的传输速率(m/s)
3. 光“猫”的作用是: 把光纤里面的光信号转换为我们平时上网所需要的网络信号
1.光猫可以干什么?
光猫负责把光纤里面的光信号,转换为我们平时上网所需要的网络信号。
2.路由器可以干什么?
路由器则将光猫已转换的网络信号传输到各个设备上面,在使用时需要先连接光猫以及设置帐号之后,才能完全上网使用。
4. 给出两种数据交换技术: 电路交换 、 报文交换
计算机网络(3)——三种常见的数据交换技术_交换技术分为哪三种_W24-的博客-CSDN博客
这段文字参考上面的文章。
然后我只能写我能看懂的部分。
数据交换有什么用?
通过数据交换可以实现数据从源主机通过网络核心送达目的主机。
主机间通信:
方式1:主机与主机间直连。
方式2:主机与交换设备相连。
方式3:不仅主机与交换设备相连,交换设备也与交换设备相连。
数据交换从技术分类来看,可分为哪几类?
3类。电路交换,报文交换,分组交换。
东西太多,看不懂了。。。


5. 假设一个主机的IP地址是172.23.67.129,子网掩码是255.255.255.128,
那么其子网号是 172.23.67.128/25
128=2^7
则子网掩码有(24+1)25个1,7个0。
IP地址与子网掩码相与:172.23.67.128
6. IEEE的局域网模型包括三个层次,分别是 层、 __ _子层和 子层。
没见过。。。
请问一下局域网体系结构分为几层?各层起什么作用?_百度知道 (baidu.com)
物理层,媒体访问控制(MAC)(Media Access Control)子层和逻辑链路控制(LC)子层
其实我依然不懂。。。
7. IP地址192.168.10.129/25的子网地址是 192.168.10.128
8. IP分组“片偏移”字段的作用是 在较长的分组分片后,给出该片在原分组中的相对位置
较长的分组在分片后,某片在原分组中的相对位置。
即相对于用户数据字段的起点,该片从何处开始。
片偏移以8个字节为偏移单位。
9. 默认路由的目的地址和掩码是 0.0.0.0和0.0.0.0
ps:我的基础挺差的。
到底什么是路由? - 知乎 (zhihu.com)
下面的内容来自这篇文章。
什么是路由?
路由器从一个接口上收到数据包,根据数据包的目的地址进行定向并转发到另一个接口的过程。
场景类比。
你下班后正准备从公司开车回家,此时路上塞满了车辆,你将在手机地图上查找道路和交通状况。根据路况,你将选择最通畅的那条路回家。
在路由中,有关数据包移动的决策是根据网络的状态做出的,路由器负责做出这些逻辑数据决策。
设置路由器的主要目的是找到数据包从源到目的地的最有效路径。使用非常复杂的算法,路由器决定当前数据包必须通过哪个路由器或设备发送。重复此过程,直到数据包最终到达目的地。
默认路由_百度百科 (baidu.com)
默认路由和静态路由的命令格式一样。只是把目的地ip和子网掩码改成0.0.0.0和0.0.0.0。
10. 访问Internet上某个服务进程,除了目的主机的域名(或IP地址)外,
还需要 端口号 ,通常用缺省值。
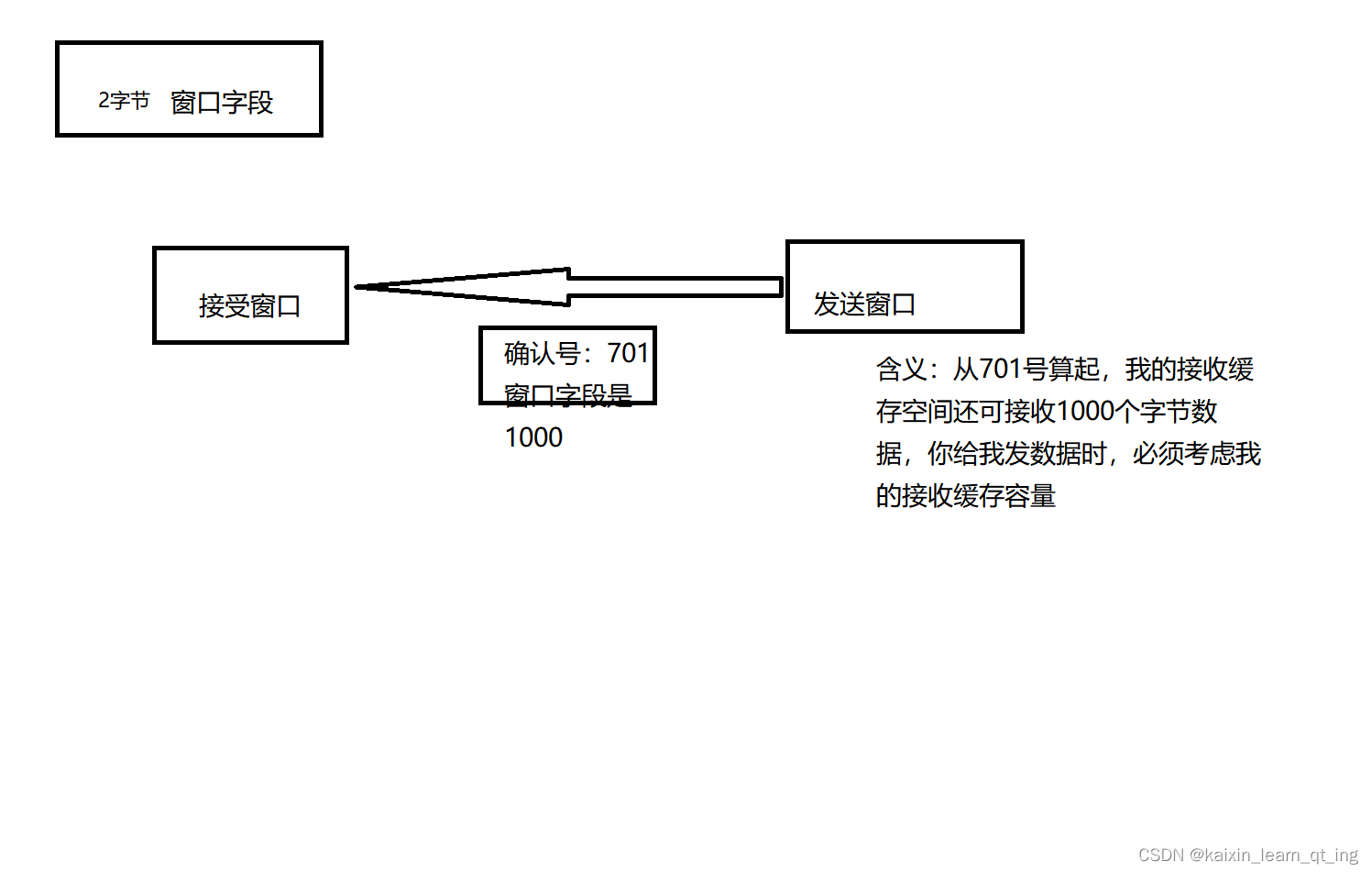
11. TCP首部的“窗口通告”字段的作用是 指出现在允许对方发送的数据量

12. 写出至少两个调试网络的常用命令: ping,tracert
13. 虚拟局域网VLAN是指 由一些局域网网段构成的与物理位置无关的逻辑组。
ps:学习这些的时候产生了无聊的想法。仿佛只是在死记硬背。
根据认知行为疗法,我还可以做出什么样的解释呢?
想法1:这些知识可以说是非常的精美严谨,我可以付出时间和精力去学习这些,很好,而且还可以让我的成绩变得更好。
我们都应该思考如何让知识变得有趣和通俗易懂。让人乐于学习。 不然很容易把学习视为痛苦的事,并让自己学习时好像溺水一样。
我觉得我们应该明白,要真正弄懂一些知识是需要付出很多努力的。