网站建设费用说明如何制作app平台
vscode远程连接服务器时,输入密码,又重新提示输入密码,就这样循环了好几次,然后会报上述的错误。由于我是window系统,我用cmd,然后ssh */你的IP地址/*发现可以远程到服务器上,但是通过Vscode就不可以,折腾了俩个多小时,终于找到解决方案啦!
1)删除.ssh文件下的known_hosts
2)在Vscode里面的工具栏help-about找到如下的commit:
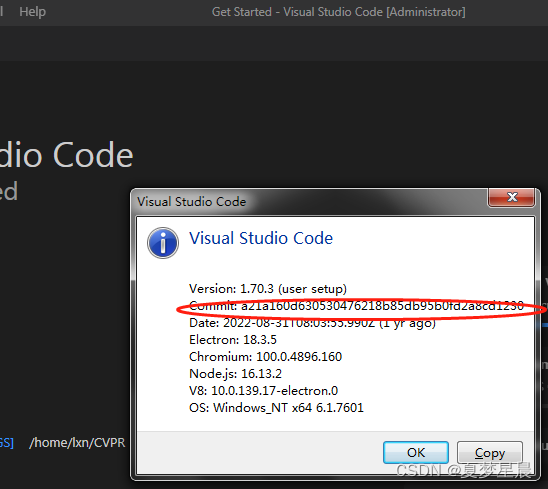
3) 在远程服务器用户根目录下:cd ~/.vscode-server/bin,然后会看到上述的commit,然后继续 cd a21a160d630530476218b85db95b0fd2a8cd1230后,删除里面的所有文件。
4) 访问如下链接:https://update.code.visualstudio.com/commit:a21a160d630530476218b85db95b0fd2a8cd1230/server-linux-x64/stable,访问前需要将链接中的a21a160d630530476218b85db95b0fd2a8cd1230替换为你自己的commit即可。将下载的vscode-server-linux-x64.tar.gz文件移动到上述3)中的commit的目录下。注:上述链接下载可能得需要梯子。
5) 执行:chmod -R 777 *,以及tar zxvf vscode-server-linux-x64.tar.gz和mv vscode-server-linux-x64/* . (别忘了后面的.)
6) 然后重新通过Vscode远程连接就可以啦