学校要求做网站黄页软件app大全
Nginx 是一个高性能的 HTTP 和反向代理服务。其特点是占有内存少,并发能力强,事实上nginx的并发能力在同类型的网页服务器中表现较好。
Nginx 专为性能优化而开发,性能是其最重要的考量指标,实现上非常注重效率,能经受住高负载的考验,有报告表明能支持高达50000个并发连接数。
在连接高并发的情况下,Nginx 是 Apache 服务不错的替代品。
什么是代理和反向代理呢?
代理其实就是一个中介,A和B本来可以直连,中间插入一个C,C就是中介。刚开始的时候,代理多数是帮助内网client(局域网)访问外网server用的。 后来出现了反向代理,
反向这个词在这儿的意思其实是指方向相反,即代理将来自外网客户端的请求转发到内网服务器,从外到内。
uWSGI 是一个 Web 服务器,它是一个用 C 语言编写的 Web 应用程序容器,支持运行 Python、Ruby、Perl 等多种编程语言。uWSGI 服务器可以作为一个独立的应用服务器,也可以与其他 Web 服务器(如 Nginx、Apache)一起使用,通过 WSGI 协议与 Python 应用程序通信。
nginx服务器配置
使用 service nginx start 启动nginx服务

uwsgi配置,在项目目录下新建uwsgi.ini文件,编辑文件,写入以下内容
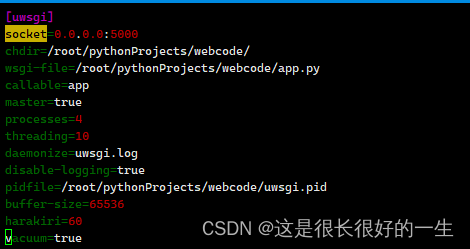
其中的路径等内容改为自己项目的路径,app.py即flask项目的启动文件,因为使用了nginx进行代理,所以使用的socket而不是http,同时socket的IP应该为0.0.0.0,而不是127.0.0.1,这样做是为了让公网上的其他用户能不受限制的访问,同时app.py中的启动应该写为run(host=0.0.0.0)。
使用uwsgi --ini uwsgi.ini 命令启动uwsgi服务,因为这里nginx绑定的是80端口,所以启动成功后就可以通过访问你的公网ip访问到你的flask项目了。 如果是其他如5000端口则需要通过ip:5000这样访问你的项目。