英文营销型网站建设萧山建设银行招聘网站
一、性能效率测试概述
性能效率(efficiency)为GB/T 25000.51-2016标准中提及的软件产品的八大产品质量特征之一。性能效率测试用于评估待测系统与软件在给定的时间和其他资源限制下完成其指定功能的程度,也称作性能测试。
为完成系统与软件性能测试,可依照的国家标准有:
-
GB/T 25000.10-2016系统与软件工程 系统与软件质量要求和评价(SQuaRE) 第 10 部分:系统与软件质量模型
-
GB/T 25000.51-2016系统与软件工程 系统与软件质量要求和评价(SQuaRE) 第 51 部分:就绪可用软件产品(RUSP)的质量要求和测试细则
-
GB/T 25000.23-2019系统与软件工程 系统与软件质量要求和评价(SQuaRE) 第 23 部分:系统与软件产品质量测量
-
GB/T 38634.1-2020系统与软件工程 软件测试 第1部分:概念和定义
-
GB/T 39788-2021系统与软件工程 性能测试方法
其中GB/T 25000.51-201和GB/T 39788-2021对系统与软件性能测试的测试要求、测试过程、测试需求模型以及测试类型进行了详细的规定与解读。
二、性能效率测试内容及方法
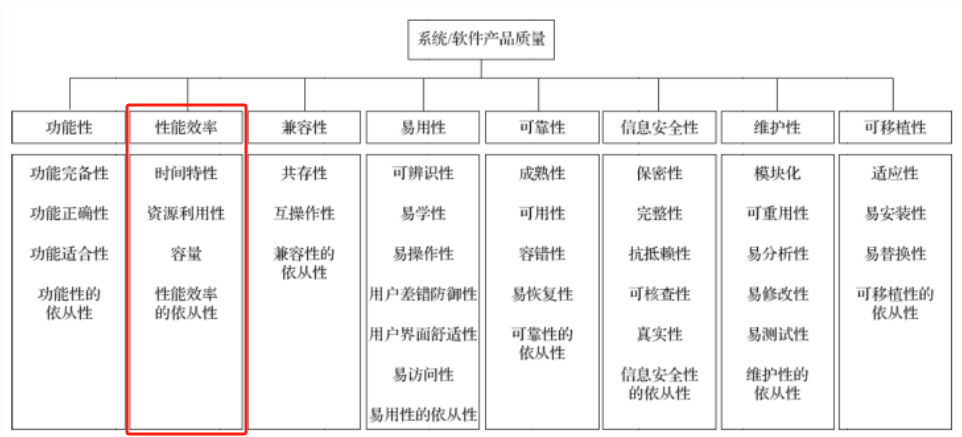
性能效率测试内容主要包含:时间特性、资源利用率、容量以及性能效率的依从性这四个方面,并以书商形式展示可验证的依从性证据,具体的测试内容还需依照被测系统或软件的测试需求再做细分。
在产品说明书中应对系统容量等数值进行描述,在进行测试时需要将所有影响性能效率的条件进行说明,如:带宽、硬盘空间、随机存储器、CPU速度等。可以选择适合的性能测试工具进行测试,如Apache JMeter、LoadRunner、Gatling等。本实验室性能效率测试使用的测试工具为Apache JMeter,下文中介绍的测试方法也以该工具为例。
(一)时间特性
时间特性是指产品或系统执行其功能时,其响应时间、吞吐率等特性满足需求的程度。
响应时间是指用户发起一个请求开始,到接收到处理结果所经历的时间。
测试方法概述:创建线程组模拟请求发送的过程,可对线程数量、线程组循环次数、线程组准备时长进行配置。再将需触发的请求添加入该线程组中,如果对并发数量以及请求输入值有特殊要求的,可添加定时器、函数、正则表达式提取器等组件。最后添加察看结果树和聚合报告,点击运行,查看聚合报告运行结果,通过聚合报告中的平均响应时间(Average)结果,判断得到的响应时间是否符合要求。

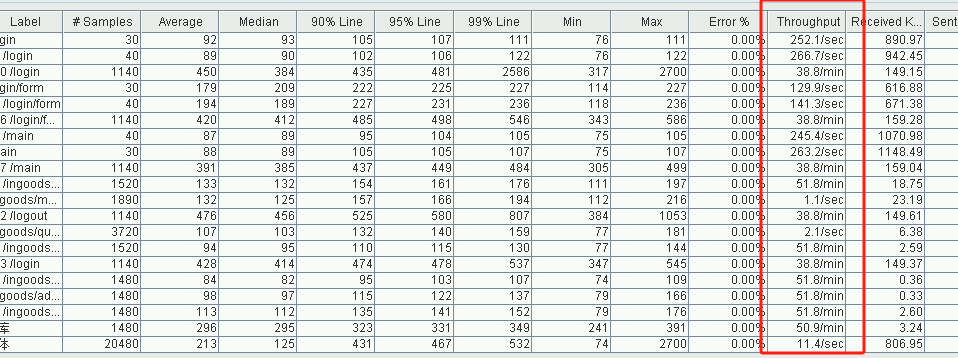
吞吐率是指单位时间内系统处理的客户请求的数量。
测试方法概述:创建线程租,添加请求。在需要监测吞吐率得的请求中设置吞吐量控制。最后通过聚合报告中的平均吞吐率(Throughout,单位为事务/分)结果,判断得到的平均吞吐率是否符合要求。
(二)资源利用率
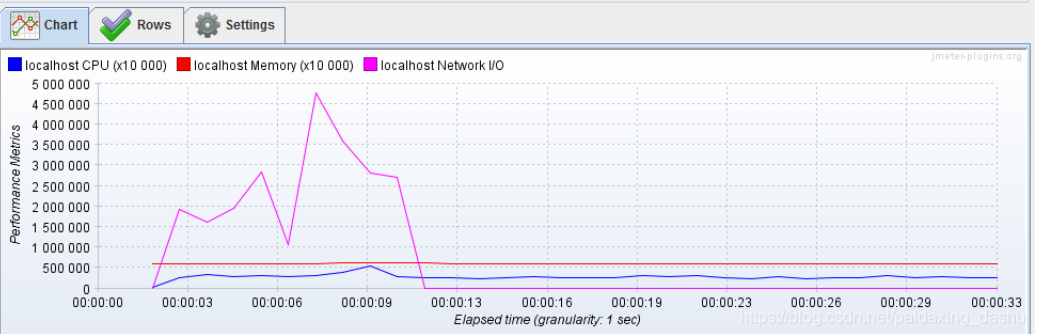
资源利用率指的是产品或系统执行其功能时,所使用资源数量和类型满足需求的程度。包括:CPU利用率、可用内存、磁盘I/O、带宽等指标。
测试方法概述:可使用JMeter自带的ServerAgent组件,实时监控电脑资源的使用情况。在设置线程组时,通过设置不同的并行用户量与服务器发生不同的交互,让服务器运行到最佳状态。最终查看监听器(jp@gc - PerfMon Metrics Collector)记录下来的数据波动结果判断是否符合要求。
(三)容量
容量指的是产品或系统参数的最大限量满足需求的程度,包括软件所能支撑的最大并发用户数、可存储的最大数据量、数据处理容量、最大的交易吞吐量等。
例如:系统支持100用户并发进行在线操作。
测试方法概述:将线程组数量设置为100模拟一百个用户在系统内并发进行操作,在用户与服务器发生交互时需要添加集合点,以保证为100个用户并发执行的,在线程组中设置循环多次保证测试结果的稳定性。最终查看聚合报告中并发触发的每个请求的报错情况(error)判断系统是否满足最大100用户并发的测试需求。

(四)性能效率的依从性
性能效率的依从性指的是产品或系统遵循与性能效率相关的标准、约定或法规以及类似规定的程度,并以书面形式展示可验证的依从性依据。
三、软件测试实验室的能力资质
中国信息通信研究院南方分院(深圳信息通信研究院)已获得国家认证认可监督管理委员会颁发的检验检测机构资质认定证书(CMA)和中国合格评定国家认可委员会(CNAS)颁发的实验室认可证书。2023年,在软件测试的性能效率和信息安全性的两次能力验证中,均获得“满意”的结果,展现了我院软件质量测评实验室的优秀的技术实力。本院拥有专业的正版测试工具,可在资质认可范围内从事软件的科研课题验收测试、信息系统验收测试、产品委托评测、安全专项评测、移动APP安全评测等,可以根据客户需求提供软件测试方案设计、测试用例设计、现场或样品送检测试、出具检测和验收报告等测试服务。成立多年以来已完成多家厂商的软件委托测试业务,并得到高度认可。
总结:
感谢每一个认真阅读我文章的人!!!
作为一位过来人也是希望大家少走一些弯路,如果你不想再体验一次学习时找不到资料,没人解答问题,坚持几天便放弃的感受的话,在这里我给大家分享一些自动化测试的学习资源,希望能给你前进的路上带来帮助。

软件测试面试文档
我们学习必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有字节大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。


视频文档获取方式:
这份文档和视频资料,对于想从事【软件测试】的朋友来说应该是最全面最完整的备战仓库,这个仓库也陪伴我走过了最艰难的路程,希望也能帮助到你!以上均可以分享,点下方小卡片即可自行领取。