万州集团网站建设北京网站设计工作室
该文档详细描述了实现一个简单的密码管理工具的过程,工具基于PHP和MySQL构建,支持用户注册、密码存储、管理以及角色权限控制等核心功能。
系统架构设计
- 技术栈:PHP(后端逻辑)、MySQL(数据存储)、Bootstrap(前端样式)
- 数据存储:用户表(
users)和密码表(passwords)存储用户的基本信息和其管理的密码信息,包含外键关联实现级联删除。 - 权限控制:通过
session会话管理用户角色,确保不同角色的访问权限。
数据库配置和安装流程
1. 数据库配置
为了便于初次安装用户配置数据库信息,工具提供了安装页面(install.php)来接收并初始化数据库参数和管理员账户。

<?php
if ($_SERVER['REQUEST_METHOD'] == 'POST') {$db_host = $_POST['db_host'];$db_user = $_POST['db_user'];$db_pass = $_POST['db_pass'];$db_name = $_POST['db_name'];// 连接数据库并创建数据库$conn = new mysqli($db_host, $db_user, $db_pass);if ($conn->connect_error) {die("连接失败: " . $conn->connect_error);}$conn->query("CREATE DATABASE IF NOT EXISTS $db_name");$conn->select_db($db_name);// 创建用户和密码表$sql_users = "CREATE TABLE IF NOT EXISTS users (id INT AUTO_INCREMENT PRIMARY KEY,username VARCHAR(50) NOT NULL,password VARCHAR(255) NOT NULL,role ENUM('admin', 'user') DEFAULT 'user')";$sql_passwords = "CREATE TABLE IF NOT EXISTS passwords (id INT AUTO_INCREMENT PRIMARY KEY,user_id INT,platform_name VARCHAR(100),platform_address VARCHAR(255),account VARCHAR(100),password VARCHAR(255),FOREIGN KEY (user_id) REFERENCES users(id) ON DELETE CASCADE)";$conn->query($sql_users);$conn->query($sql_passwords);// 创建管理员账户$admin_username = $_POST['admin_username'];$admin_password = password_hash($_POST['admin_password'], PASSWORD_BCRYPT);$conn->query("INSERT INTO users (username, password, role) VALUES ('$admin_username', '$admin_password', 'admin')");// 将数据库配置写入文件$config_content = "<?php\n". "\$db_host = '$db_host';\n". "\$db_user = '$db_user';\n". "\$db_pass = '$db_pass';\n". "\$db_name = '$db_name';\n". "\$conn = new mysqli(\$db_host, \$db_user, \$db_pass, \$db_name);\n". "if (\$conn->connect_error) {\n". " die(\"连接失败: \" . \$conn->connect_error);\n". "}\n";file_put_contents('config.php', $config_content);echo "<div class='alert alert-success'>安装成功!</div>";
}
?>在 install.php 文件中,定义了数据库连接及初始化代码,接受表单输入并写入配置文件 config.php,用于后续的数据库访问。
用户身份验证与会话管理
用户登录和权限管理通过session实现。登录页面login.php验证用户身份并开启会话,将用户ID和角色写入会话变量,以便后续操作中使用。
用户登录 (login.php)
<?php
session_start();
include 'db.php';if ($_SERVER['REQUEST_METHOD'] == 'POST') {$username = $_POST['username'];$password = $_POST['password'];$result = $conn->query("SELECT * FROM users WHERE username='$username'");if ($result->num_rows > 0) {$user = $result->fetch_assoc();if (password_verify($password, $user['password'])) {$_SESSION['user_id'] = $user['id'];$_SESSION['role'] = $user['role'];header('Location: dashboard.php');exit;}}echo "<div class='alert alert-danger'>用户名或密码错误!</div>";
}
?>登录验证流程:
- 获取用户输入的用户名和密码。
- 使用
SELECT语句查询用户信息,并验证密码(password_verify)。 - 验证成功后,写入会话(
$_SESSION['user_id']和$_SESSION['role'])并跳转至主页面。
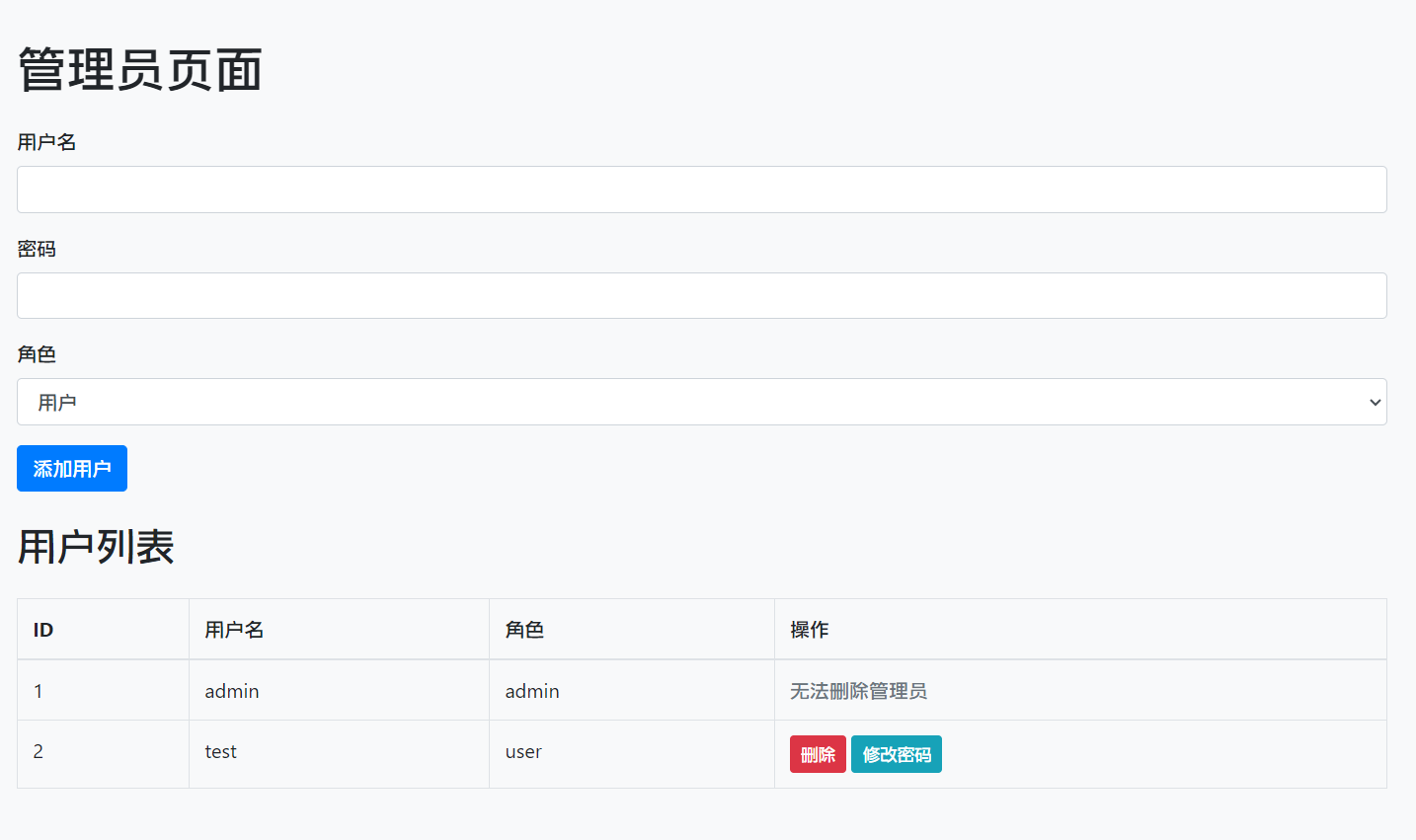
管理员页面和用户管理
管理员页面(admin.php)提供用户的增删改功能,管理员角色控制通过会话变量实现。此页面仅限role='admin'的用户访问。
用户管理 (admin.php)
<?php
session_start();
include 'db.php';if (!isset($_SESSION['user_id']) || $_SESSION['role'] !== 'admin') {header('Location: login.php');exit;
}// 添加用户
if ($_SERVER['REQUEST_METHOD'] == 'POST' && isset($_POST['action']) && $_POST['action'] == 'add') {$username = $_POST['username'];$password = password_hash($_POST['password'], PASSWORD_BCRYPT);$role = $_POST['role'];$conn->query("INSERT INTO users (username, password, role) VALUES ('$username', '$password', '$role')");
}// 删除用户
if ($_SERVER['REQUEST_METHOD'] == 'POST' && isset($_POST['action']) && $_POST['action'] == 'delete') {$userId = intval($_POST['user_id']);$result = $conn->query("SELECT role FROM users WHERE id=$userId");$user = $result->fetch_assoc();if ($user && $user['role'] !== 'admin') {$conn->query("DELETE FROM users WHERE id=$userId");}
}
?>管理员页面支持:
- 添加用户:从表单获取用户名、密码、角色信息,进行哈希加密存储。
- 删除用户:基于用户ID执行删除操作,仅允许删除非管理员用户。
密码管理
主页面(dashboard.php)实现用户的密码管理功能,包括密码的添加、删除、修改和搜索等操作。每个密码条目包含平台名称、平台地址、账号和密码。

添加密码
用户通过表单提交密码条目,包括平台名称、地址、账号和密码,数据存储在 passwords 表中。
if ($_SERVER['REQUEST_METHOD'] == 'POST' && isset($_POST['add_password'])) {$platform_name = $_POST['platform_name'];$platform_address = $_POST['platform_address'];$account = $_POST['account'];$password = $_POST['password'];$conn->query("INSERT INTO passwords (user_id, platform_name, platform_address, account, password) VALUES ('$user_id', '$platform_name', '$platform_address', '$account', '$password')");
}删除密码
if (isset($_GET['delete_id'])) {$delete_id = $_GET['delete_id'];$conn->query("DELETE FROM passwords WHERE id='$delete_id' AND user_id='$user_id'");header("Location: dashboard.php");exit;
}编辑密码
if (isset($_POST['edit_password'])) {$id = $_POST['id'];$platform_name = $_POST['platform_name'];$platform_address = $_POST['platform_address'];$account = $_POST['account'];$password = $_POST['password'];$conn->query("UPDATE passwords SET platform_name='$platform_name', platform_address='$platform_address', account='$account', password='$password' WHERE id='$id' AND user_id='$user_id'");header("Location: dashboard.php");exit;
}通过模态框提供编辑密码功能,用户可以修改已有条目数据并提交更改。
安全性措施
- 密码加密:使用
password_hash和password_verify函数确保用户密码安全存储和验证。 - SQL注入防范:用户输入通过适当的数据类型转换,避免直接拼接字符串进行查询,提升安全性。
- 权限控制:基于会话的角色验证,确保管理员操作权限,阻止普通用户访问管理页面。
结论
通过上述模块的构建,实现了一个功能完备的密码管理工具。系统设计中充分考虑了数据安全和用户权限控制,满足基础的密码管理需求。
项目地址:GitHub - C4rpeDime/Passwordstorage: 这是一个简易的密码管理器,帮助你安全地存储和管理你的各种在线账号的登录信息。 使用此工具,你可以轻松添加、编辑和删除账号信息,确保所有重要的密码都有条不紊地管理。