网站更改备案广西住建领域培训考试系统
摘要
本研究考察了衰老如何影响睡眠在巩固新学习的认知策略中的作用。共纳入40名健康年轻人(20-35岁)和30名健康老年人(60-85岁)。参与者接受了河内塔(ToH)任务的训练,然后,每个年龄组的一半参与者被分配到90分钟的午睡条件下,另一半则保持清醒状态,之后进行重测。针对非快速眼动睡眠(NREM)期间慢波(SW)和纺锤波(SP)之间的时间共现,结合年龄因素,探讨了纺锤波-慢波耦合与问题解决能力之间的关系。研究结果发现,尽管老年人的学习能力完好,但他们在解决问题能力方面获得的睡眠益处低于年轻人。正如预期的那样,从对照组到测试阶段,老年人的耦合纺锤波百分比低于年轻人。此外,与老年人相比,年轻人的纺锤波与SW的上升期耦合更强。与年轻人相比,老年个体的耦合纺锤波振幅(平均曲线下面积;μV)较低。在老年人中,ToH准确率的睡眠增益与纺锤波耦合到慢波上升期的百分比之间存在显著关系。这些结果表明,随着年龄的增长,纺锤波-慢波耦合会减弱。然而,耦合程度的保持与睡眠期间问题解决能力巩固的程度相关。
图形摘要
引言
良好的睡眠与健康的认知老化有关。然而,随着年龄的增长,睡眠的数量和质量都会显著下降,影响了与睡眠有关的记忆巩固过程。具体来说,最近的研究表明,与年龄相关的纺锤波和慢波的变化与睡眠对记忆巩固的益处减少有关。
与年龄相关的最明显的睡眠变化之一是睡眠纺锤波的减少。随着年龄的增长,纺锤波的密度、持续时间和振幅显著降低。越来越多的研究认为,非快速眼动(NREM)睡眠,特别是纺锤波,对程序性记忆的最佳巩固是必要的。与纺锤波相关的重复和连贯的放电模式被认为有助于促进睡眠相关记忆巩固过程中的可塑性变化。然而,这在健康老龄化过程中仍有待全面探索。
在健康年轻人中,睡眠可巩固新习得的程序性技能(包括问题解决、规则学习、程序、习惯、条件性行为和通过反复练习获得的认知技能)。然而,最近的研究发现,尽管老年人的初始学习速度正常,但在程序性记忆巩固方面,老年人并没有像年轻人那样从睡眠中获得同样的益处。此外,在高强度的程序性运动技能学习之后,可以观察到与学习相关的纺锤波密度、持续时间和振幅增加,其中一些纺锤波特征的变化与记忆表现的离线增益相关。最近的两项研究表明,纺锤波也可能与涉及复杂认知问题解决的程序性技能巩固相关,但证据非常有限,目前尚不清楚这种关系如何受到年龄的影响。综上所述,这些结果表明,与年龄相关的纺锤波减少可能导致年龄相关的程序性记忆巩固缺陷。然而,关于纺锤波和慢波对复杂认知问题解决技能最佳巩固的作用却知之甚少,更不用说年龄对这种关系的影响了。
除了年龄相关的纺锤波变化外,老年人的慢波也显著减少。这个过程早在中年就开始了。慢波有两种状态:一种是“上升态”,另一种是“下降态”。上升态包括去极化和神经元放电增加,而下降态反映了膜电位的超极化和神经元放电减少。人们认为,在上升态期间,再激活可以加强新形成的记忆。随着个体年龄的增长,慢波的斜率、振幅和密度都会下降。特别是,与年轻人相比,老年人显示出慢波斜率下降,慢波正负相位延长。这些与年龄相关的差异表明,皮层神经元同步进入慢波去极化和超极化阶段需要更多的时间,这进一步受到特定皮层区域微结构退化的影响(可能影响记忆巩固)。因此,与年龄相关的纺锤波和慢波变化可以作为年龄相关认知衰退以及早期神经退行性变的电生理标志物。它们也可能成为缓解年龄相关认知衰退的新型治疗靶点。
在NREM睡眠期间,慢波和纺锤波之间的时间耦合被认为有助于记忆巩固。慢波、纺锤波和海马涟波之间的耦合有助于促进海马体和新皮质之间的信息转换。具体来说,慢波的去极化上升态可用于将纺锤波和涟波事件进行分组,其中海马涟波在时间上嵌套在纺锤波波谷中。此外,纺锤波和慢波耦合的机制受到年龄影响,随着年龄的增长,纺锤波-慢波会变得越来越“解耦”。有趣的是,Solano等人发现运动学习可以调节慢波-纺锤波耦合,并且这种调节程度可预测长期记忆的巩固情况。
在这里,本研究考察了年龄对慢波-纺锤波(SW-SP)耦合在巩固解决问题所需的新型认知策略中的影响。本研究假设:1)与老年人相比,在年轻人中将观察到与睡眠相关的行为改善,2)与年轻人相比,老年人的SW-SP共存减少,且耦合度较低(特别是在上升态期间),3)在获得一种新的认知策略后,年轻人与老年人之间的SW-SP耦合度会增加,4)SW-SP耦合参数的变化与年轻人和老年人在睡眠相关的行为表现增益上存在不同程度的相关性。
方法
参与者
所有符合条件的参与者健康状况良好,睡眠时间规律(通常在晚上10:00至早上9:00之间)。符合条件的参与者均为右利手、非轮班工作者、未曾服用影响睡眠的药物、视力正常或已矫正至正常水平、身体质量指数<30、无慢性疼痛或癫痫发作、无既往头部损伤或任何手部活动问题。如果参与者之前解过河内塔(ToH)或类似的谜题/任务,则被排除在外。所有参与者在贝克抑郁和焦虑量表上得分需<10,此外,在睡眠障碍量表中无睡眠障碍的迹象。为了排除轻度认知障碍或痴呆的迹象,老年参与者需要在蒙特利尔认知评估中得分≥26,在日常认知量表上的得分<2。所有参与者均完成了午睡行为调查以确保年轻人和老年人在午睡行为方面没有差异。独立性卡方检验显示年龄与午睡行为之间无显著相关性(p=0.622)。Fisher精确检验证实了这一发现(p=0.632)。
本研究纳入的所有参与者没有摄入过量的含咖啡因或酒精的饮料,并且需限制咖啡因摄入量,在实验期间禁止饮酒。为确保遵守研究方案,参与者需要在整个研究期间佩戴Motionlogger睡眠记录仪(Ambulatory Monitoring Inc., Ardsley, NY, U.S.A),这是一款手腕式加速计,可测量睡眠-清醒相关的肢体运动。要求参与者完成每日活动和睡眠习惯日志记录,保持规律的作息时间(通常就寝时间为晚上10:00至1:00之间,起床时间为早上6:00至9:00之间),并避免白天小睡。如果睡眠记录仪或睡眠日志显示参与者未遵守研究方案,则被排除在研究之外。
此外,所有参与者均接受了多导睡眠图(PSG)记录,以确保他们能够在白天午睡期间在实验室睡觉。这个PSG记录还用于排除睡眠障碍的迹象。PSG记录遵循AASM指南,并且至少在实验前一周进行。最终纳入的样本,需要具备睡眠效率>80%,周期性肢体运动(PLM)指数<10次/小时,以及呼吸暂停-低通气指数<5次/小时。
有七名老年人和五名年轻人不符合规律作息时间的纳入标准。另外,有三名老年人和一名年轻人不符合PSG筛查标准。最终样本包括40名年龄在20-35岁之间的健康年轻人(23名女性;M=23.9岁,SD=3.9岁),以及30名年龄在60-85岁之间的健康老年人(20名女性;M=68.0岁,SD=7.6岁)。其中包括N=20名睡眠(午睡)条件下的年轻参与者(YN),N=20名清醒(觉醒)条件下的年轻参与者(YW),N=15名睡眠(午睡)条件下的老年参与者(ON),N=15名清醒(觉醒)条件下的老年参与者(OW)。
实验设计
在经过适应/筛查之后,参与者被随机分成四组:年轻睡眠组(YN)、年轻清醒组(YW)、老年睡眠组(ON)和老年清醒组(OW)。所有参与者都完成了测试和控制阶段(图1),并被要求在上午9:00到达睡眠实验室。从上午10:00开始,让参与者完成ToH任务(测试日)或CTRL任务(对照日),完成任务的顺序在参与者之间进行了平衡。从下午1:00开始,参与者要么进行90分钟的白天午睡,要么保持清醒。在睡眠和清醒阶段都进行了多导睡眠图记录(PSG)。所有午睡条件下的参与者都在同一预定时间(下午2:30)被实验者叫醒。如果参与者在预定时间之前醒来,要求他们闭眼躺在床上,直到实验者进入房间。为确保数据分析所需的数据量,参与者需要在午睡期间至少连续睡眠5分钟。在下午5:00进行重测,避免出现睡眠惯性效应。所有参与者在每次测试前后都完成了斯坦福嗜睡量表(SSS)和精神运动警觉性测试(PVT)。
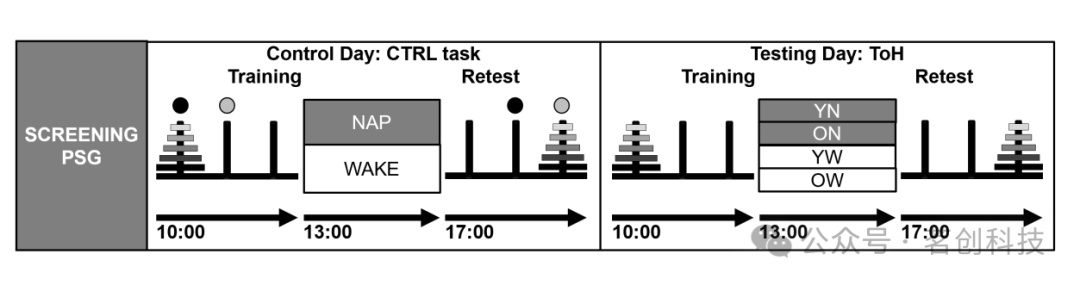
图1.研究设计。
行为测量与分析
使用Psychophysics工具箱扩展版本3.0.12在MATLAB R2016a(Mathworks Inc., Natick, MA, USA)中运行,并采用了两个计算机化的ToH任务版本:(1)经典的河内塔任务,以及(2)一个控制任务版本,无法学习该策略。
河内塔任务(ToH)。ToH任务由5个圆盘组成,这些圆盘按递增顺序堆叠。参与者可以通过键盘上的相应按键将圆盘移动到三根柱子中的一根。任务的主要目标是将所有圆盘从起始位置(最左边的柱子)移动到最终位置(最右边的柱子),使它们按升序堆叠。参与者完成任务时需遵守以下约束条件:1)每次只能移动一个圆盘,2)只能移动柱子上最上面的一个圆盘,3)只能将较小的圆盘放在较大的圆盘上面。完成ToH的最优步数为31,这是通过代数方法确定的,公式为2N-1,其中N是圆盘数量。响应按钮盒(型号HHSC-2x4-C; Current Designs Inc., Philadelphia PA, USA)由三个间距相等的水平按钮组成。
ToH的表现以速度(完成每次ToH试验的时间)和准确性(平均绝对百分比误差;MAPE)来衡量。MAPE可以解释为完美表现的百分比(例如,31次移动),其中100%代表完美表现(即最优解),而0%理论上代表无限次移动。对于n个观测值,MAPE的计算如下:

控制任务(CTRL)。CTRL任务与ToH任务在视觉上完全相同,包括任务的感觉运动、空间和视觉方面,唯一不同之处在于参与者被引导进行一系列提示性的随机移动,因此无法学习到潜在的策略。一个绿点(表示原点)或一个红点(表示目的地)将分别出现在待移动的圆盘上方和目标柱上方,指示参与者应该按下键盘上的哪些按钮以及以什么顺序按下。一次试验在经过31次引导性移动(对应于完成5圆盘ToH任务所需的最小步数)后被视为完成。参与者进行了四次CTRL任务试验,每次试验后都有20s的休息时间。使用SPSS 27(IBM, Armonk, New York, U.S.)完成行为数据的分析。
多导睡眠图记录参数
实验室PSG使用Embla N7000放大系统(Natus, Pleasonton, CA, USA)进行记录,采样率为500Hz。EEG(Fp1、Fpz、Fp2、F3、Fz、F4、C3、Cz、C4、P3、Pz、P4、Oz、A1、A2)和EOG(放置于左右外眼角)的在线参考为Fpz。EEG和EOG按国际10-20系统放置。此外,颏下肌电通道以双极导联方式记录。在初筛PSG记录期间,还使用鼻/口温度计、呼吸力带和腿部EMG电极来筛查睡眠呼吸暂停、不宁腿综合征和其他睡眠障碍的迹象。
多导睡眠图数据分析
采用兼容EEGlab的“Counting Sheep PSG” 工具箱(https://github.com/stuartfogel/CountingSheepPSG)进行手动睡眠分期评分。EEG和EOG重参考为A1和A2。EEG的滤波范围为0.3-35Hz,EOG的滤波范围为0.3-10Hz,EMG的滤波范围为10-100Hz。
慢波-纺锤波耦合分析
利用Fz、Cz和Pz的慢波负峰潜伏期和纺锤波峰潜伏期,并使用Mölle等人开发的方法进行耦合检测程序,使用基于MATLAB R2019b(The MathWorks Inc.)的EEGlab软件进行分析。当纺锤波在慢波峰值的4s时间窗内出现时,将纺锤波标记为耦合SW-SP复合体。另外,当纺锤波出现在4s时间窗之外时,将纺锤波标记为“非耦合”。滞后定义为慢波负峰和纺锤波起始点之间的距离。然后计算滞后方差作为耦合强度的度量。采用配对样本t检验比较在4s时间窗内以200ms为间隔测量的SW-SP复合体出现情况。
此外,本研究计算了带通滤波的慢波信号在纺锤波起始位置的相位(以弧度表示)。使用CircStat工具包确定所有耦合纺锤波事件相角的平均方向。然后计算每位参与者的SW-SP耦合的首选相位。接下来,进行均匀性检验(Rayleigh检验)和具有预定义平均方向的均匀性检验(v检验)。从SW-SP耦合数据中,提取每个记录的SW-SP和未耦合纺锤波事件列表,并提取SW-SP事件的纺锤波峰值振荡频率和滞后时间。
结果
行为结果
训练阶段。采用2年龄组(年轻人、老年人)×8训练阶段(1-8阶段)的ANOVA分析来检验在年轻和老年参与者中是否都发生了学习过程。在整个训练过程中,观察到年轻人和老年人的问题解决速度都有明显提高。训练阶段与年龄的交互作用不显著,这表明年轻人和老年人在任务上的改善程度相同。同样,在训练过程中,年轻人的准确率显著提高,但在老年人中则没有,因为他们的表现总体上较为平稳。然而,在训练结束时,年轻人和老年人之间的准确率没有显著差异,这表明年轻和老年参与者在训练结束时对任务的学习程度相同。
离线增益(Offline gains)。研究采用2年龄组(年轻人、老年人)×2睡眠条件(午睡、清醒)的ANOVA分析,探讨了年龄和睡眠相关变化对记忆巩固表现的影响(图2)。分析显示,这两种因素在速度和准确率的增益百分比方面存在显著的交互作用。在控制性别和午睡时长的情况下,这种效应仍然显著。进一步分析显示,YN组的表现改善明显高于YW组和ON组。YW组与OW组之间没有显著差异。然而,OW组的表现明显优于ON组。
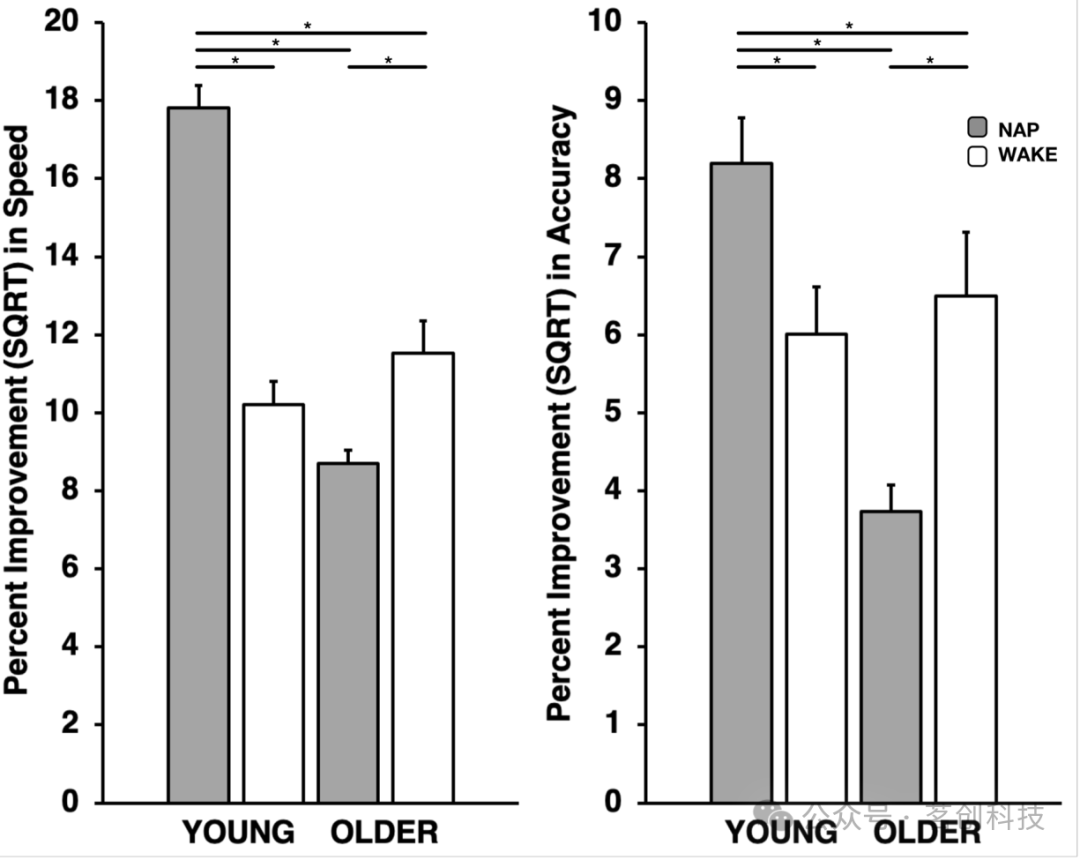
图2.ToH表现。
睡眠结果
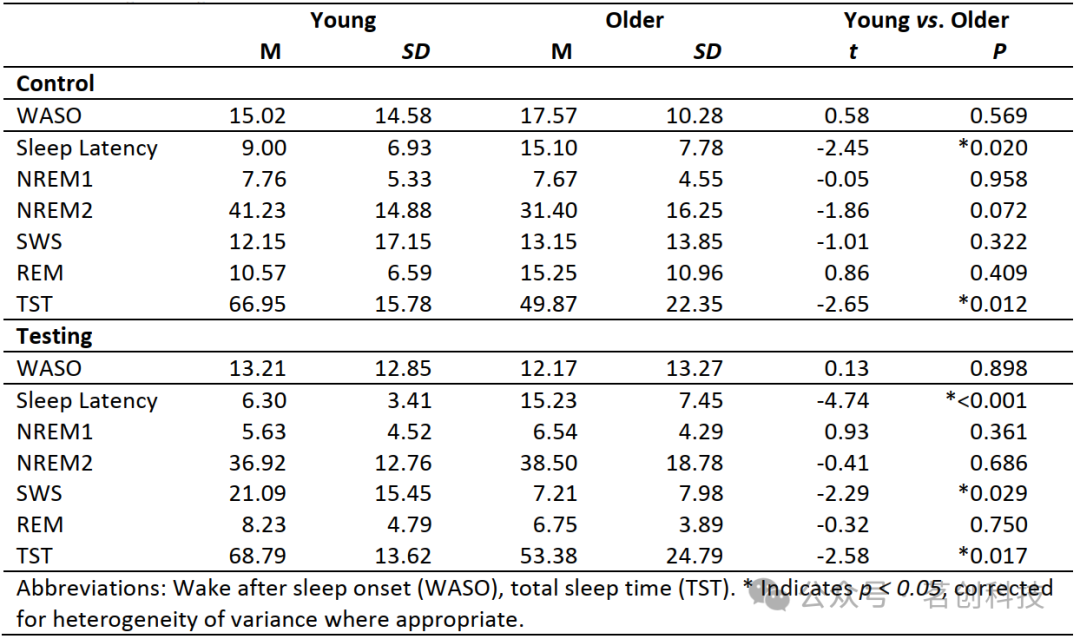
睡眠结构。正如预期的那样,年轻和老年参与者在睡眠结构特征方面存在差异(表1)。研究采用2年龄组(年轻人、老年人)×2任务条件(CTRL、ToH)的ANOVA分析来考察睡眠结构的相关变化。对于总睡眠时间(TST),观察到了显著的年龄组主效应。相对于老年人,年轻人在对照组和测试组的睡眠时间都明显更长。此外,与老年人相比,年轻人在测试午睡期间的SWS时间明显更多。任务条件与年龄组之间的交互作用不显著。
表1.控制和测试阶段的睡眠结构。
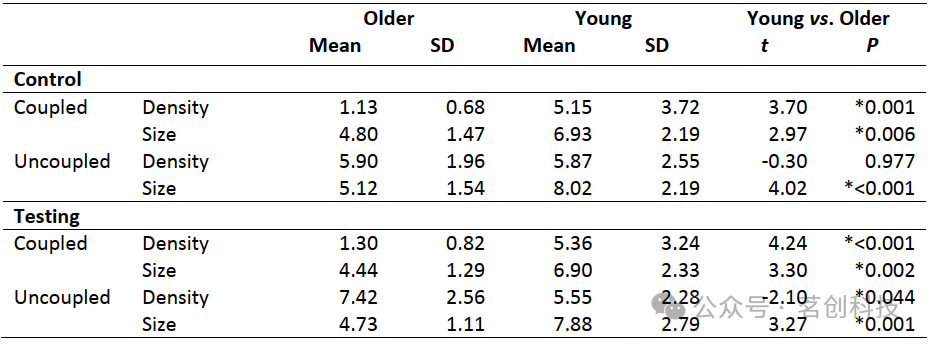
SW-SP耦合和非耦合纺锤波特征。采用2年龄组(年轻人、老年人)×2任务条件(CTRL、ToH)的ANOVA分析发现,对于任何耦合睡眠纺锤波变量,年龄组与任务条件之间没有显著交互作用。然而,对于密度和大小,年龄的主效应显著,其中老年组的耦合纺锤波数量比年轻组更少。
使用相同的分析策略来研究年轻人和老年人在控制到测试阶段非耦合纺锤波特征的变化。对于任何非耦合的睡眠纺锤波变量,年龄组与任务条件之间的交互作用不显著。与耦合事件不同的是,对于密度而言,年龄的主效应不显著,因此表明仅在耦合事件中,年轻人的纺锤波多于老年人,而非耦合的纺锤波数量与老年人相当。与耦合事件类似,对于大小而言,年龄的主效应显著,老年组的非耦合纺锤波比年轻组更小。结果如表2所示。
表2.睡眠纺锤波参数。
SW-SP耦合百分比。年轻人和老年人在控制和测试阶段的纺锤波耦合百分比如图3所示。年龄组与任务条件之间无显著交互作用。年龄对纺锤波耦合百分比有显著影响,老年组的纺锤波耦合百分比显著低于年轻组。使用相同的方法来研究在上升态期间(相对于SW负峰从0到1秒)纺锤波耦合百分比的变化。研究结果发现,年龄组与任务条件之间的交互作用不显著。年龄组的主效应显著,即老年人在SW上升态期间的纺锤波耦合百分比低于年轻人。
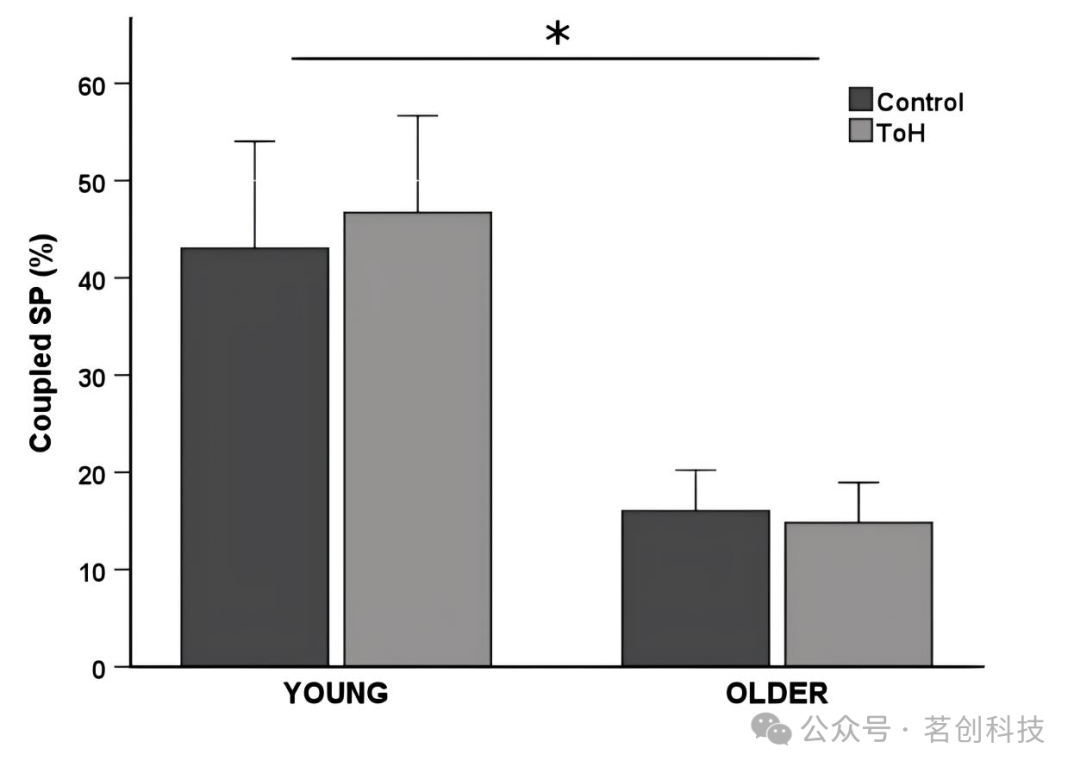
图3.在控制和测试阶段,不同年龄组的纺锤波耦合百分比。
接下来,为了研究纺锤波与慢波之间的相位关系,提取了每个SW-SP事件纺锤波最大值处的慢波相位,并计算了每个单独事件的平均相角。采用2年龄组(年轻人、老年人)×2任务条件(CTRL、ToH)的ANOVA分析考察了平均向量长度(MVL)的变化。年龄组与任务条件的交互作用不显著,年龄或条件的主效应也不显著。采用相同方法来研究耦合相位的变化,以平均圆向量表示。年龄组与任务条件之间的交互作用,以及任务条件对耦合相位的主效应均不显著。但年龄的主效应显著,这表明与老年组相比,年轻组的纺锤波耦合更紧密地锁定在慢波上升期。
纺锤波耦合与ToH表现之间的关系。首先,使用双变量相关分析来评估离线增益是否与SW-SP耦合相关(图4)。在老年人中,准确率的离线增益与上升期的纺锤波耦合百分比变化之间存在显著相关性,但在年轻人中无显著关联。年轻人和老年人在准确率的离线增益与纺锤波耦合百分比之间相关性的差异在统计上并不显著,尽管它接近统计显著性。速度的离线增益与任何耦合指标之间没有显著关系。
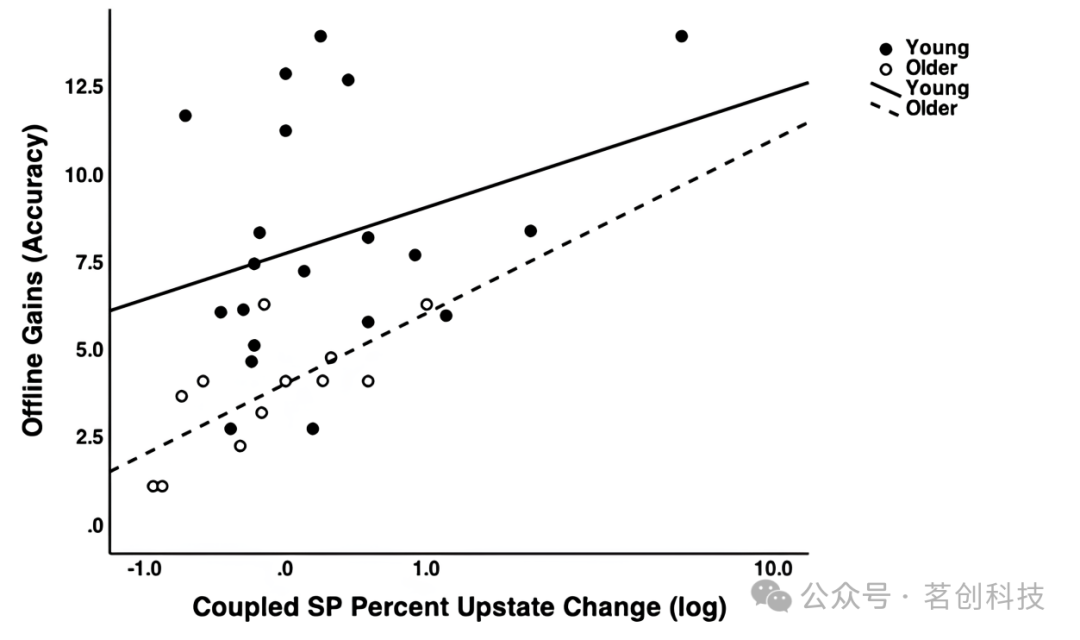
图4.不同年龄组在上升期的纺锤波耦合百分比与离线表现增益(准确率得分)之间存在显著相关性。
结论
总的来说,这项研究为年龄相关的睡眠变化对习得新认知问题解决技能的电生理结果提供了证据。在行为方面,研究发现老年人的学习能力完好。然而,相较于年轻人,老年人在问题解决能力的睡眠巩固方面获益减少。在睡眠结构和微结构方面,SW-SP耦合随着年龄的增长而减弱。这种情况在上升期尤为明显,并且老年人的耦合纺锤波大小和密度都有所降低。因此,随着年龄的增长,SW-SP耦合会减少,但现有的耦合程度仍然可以作为衡量老年个体从睡眠中获得新问题解决能力巩固程度的标志。
参考文献:D Baena, B Toor, N H van den Berg, L B Ray, S M Fogel, Spindle-slow wave coupling and problem-solving skills: Impact of age, Sleep, 2024;, zsae072, https://doi.org/10.1093/sleep/zsae072
小伙伴们关注茗创科技,将第一时间收到精彩内容推送哦~
