县区网站建设运行汇报建设网站的报告
SAP系统当中已经有哪些品目要怎么查询呢?
1,MM60 品目一览
这里可以输入Plant,然后可以查询该工厂的所有品目。


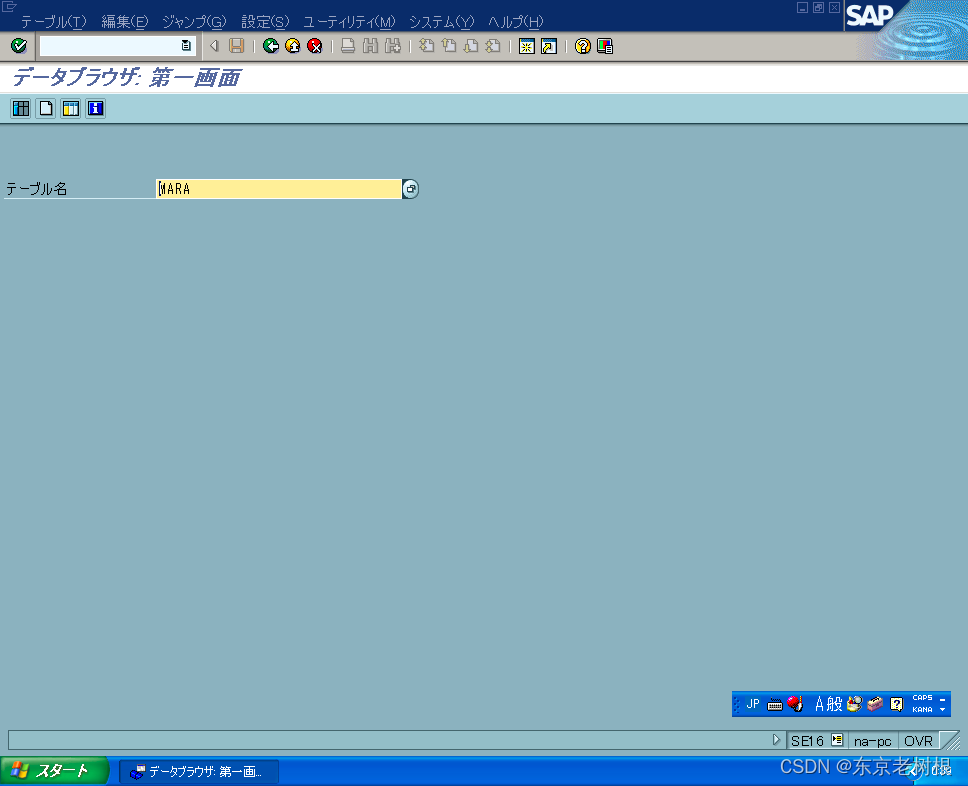
2,SE16 > MARA
MARA 品目一般Data,存放的是品目基本信息。
如果要查询该品目属于哪个Plant,还得是上面那个 MM60
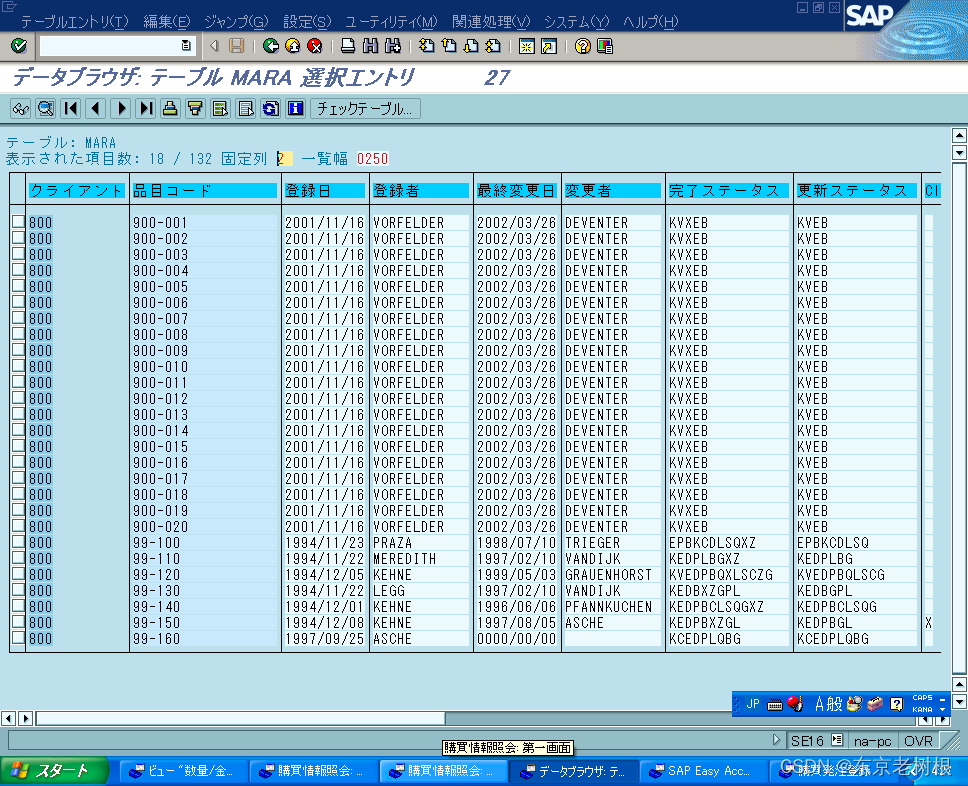
品目Code可以模糊查询,比如加 *
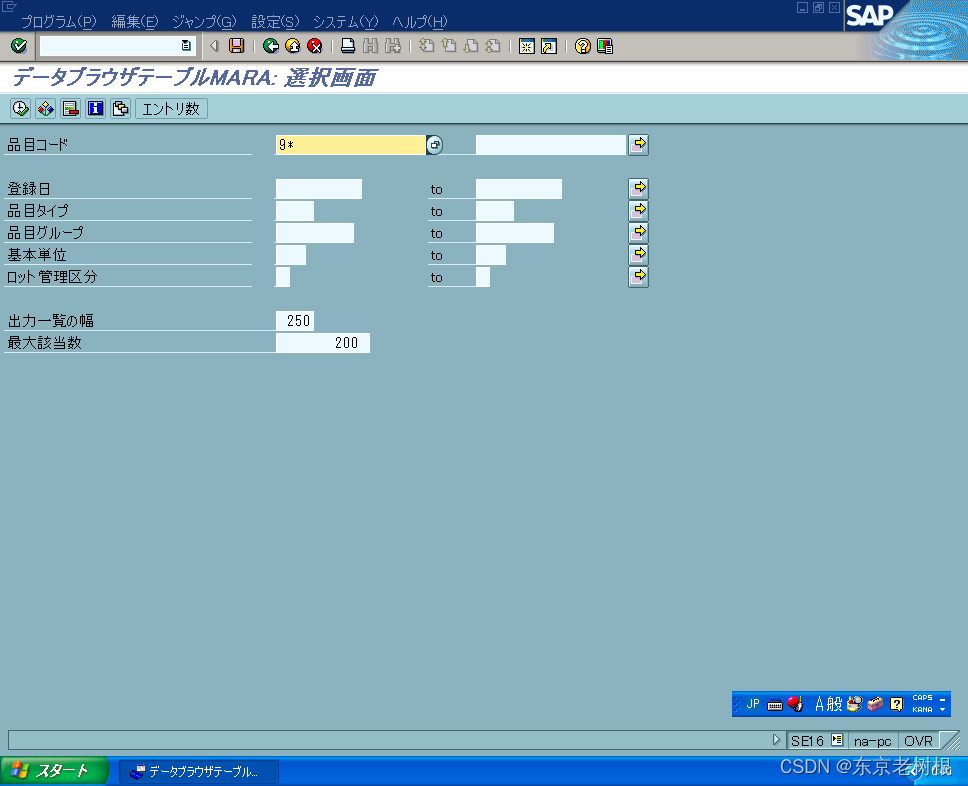
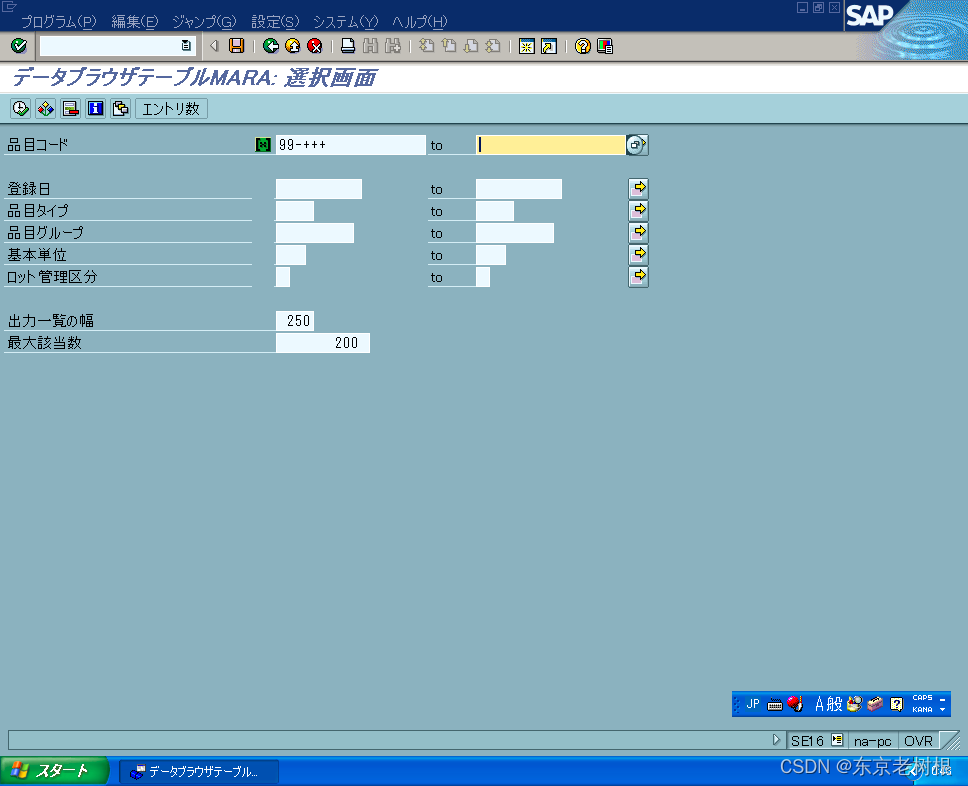
还可以用+号来按位匹配。比如 +++ ,表示3位

SAP系统当中已经有哪些品目要怎么查询呢?
这里可以输入Plant,然后可以查询该工厂的所有品目。
MARA 品目一般Data,存放的是品目基本信息。
如果要查询该品目属于哪个Plant,还得是上面那个 MM60
品目Code可以模糊查询,比如加 *
还可以用+号来按位匹配。比如 +++ ,表示3位