网站制作设计培训多少钱域名网站是什么
1.什么是虚拟化?
•虚拟化是云计算的基础。
•虚拟化是指计算元件在虚拟的而不是真实的硬件基础上运行。
•虚拟化将物理资源转变为具有可管理性的逻辑资源,以消除物理结构之间的隔离,将物理资源融为一个整体。虚拟化是一种简化管理和优化资源的解决方案。
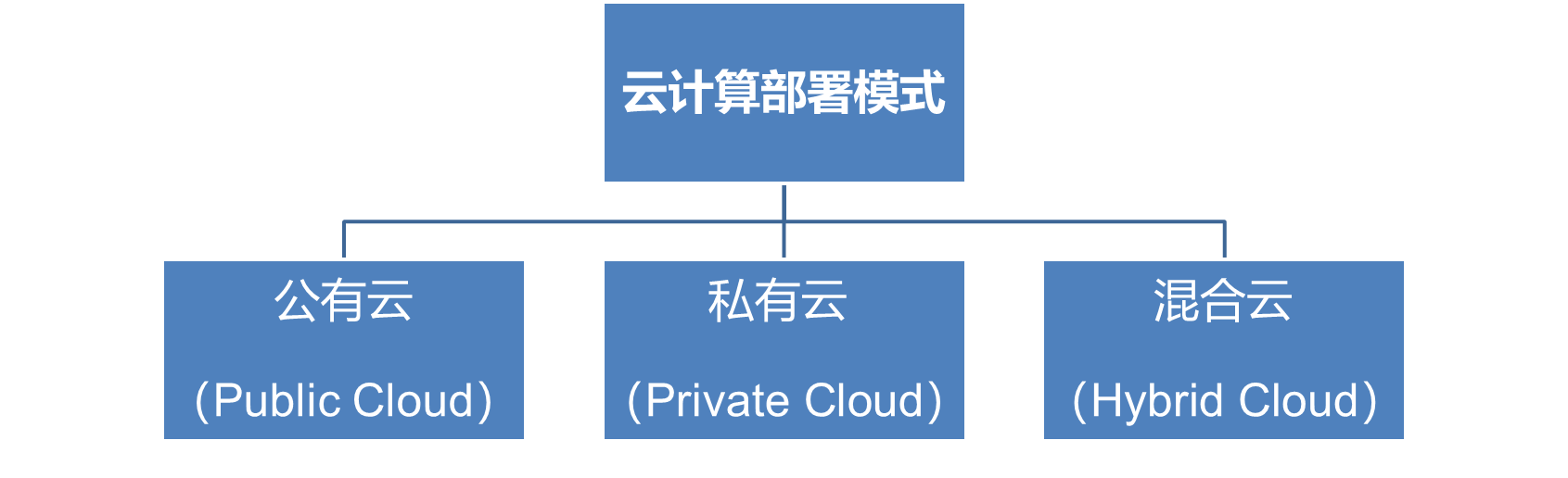
2.什么是云计算?
•云(Cloud)是网络、互联网的一种比喻说法。
•云计算是提供虚拟化资源的模式。
•云计算提供的是IT资源租用服务。
•云计算是IT系统架构不断发展的产物。
3.云计算架构

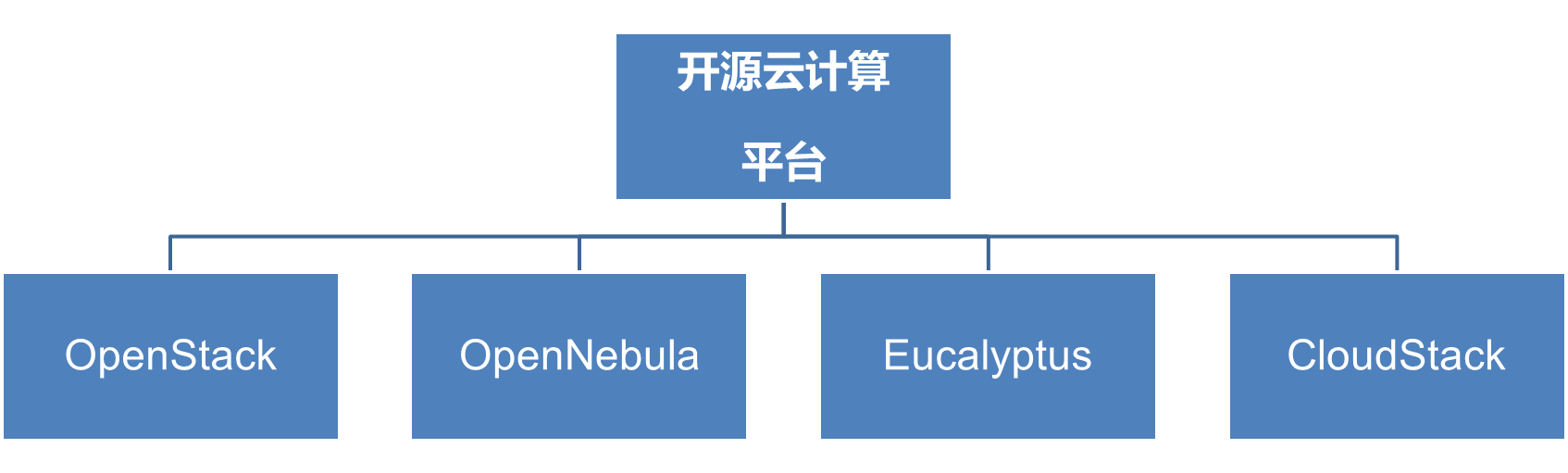
4. 什么是 OpenStack
• OpenStack 是一系列开源软件项目的组合。
• OpenStack 是 目前非常流行的开源云 操作系统
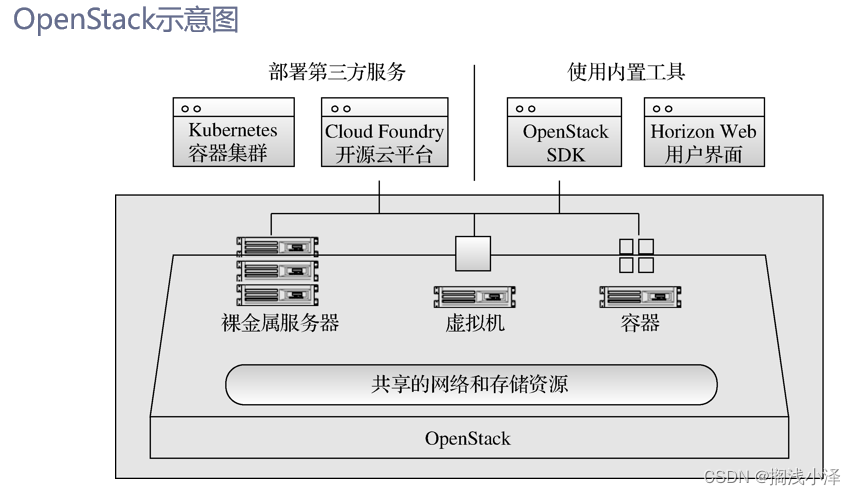
• OpenStack 是 基础设施资源的系统管理平台。
• OpenStack 对数据中心的计算、存储和网络资源进行统一 管理。
• OpenStack 作为虚拟机、裸金属服务器和容器等的云基础架构和基础设施平台。
 5•OpenStack项目及其组成
5•OpenStack项目及其组成
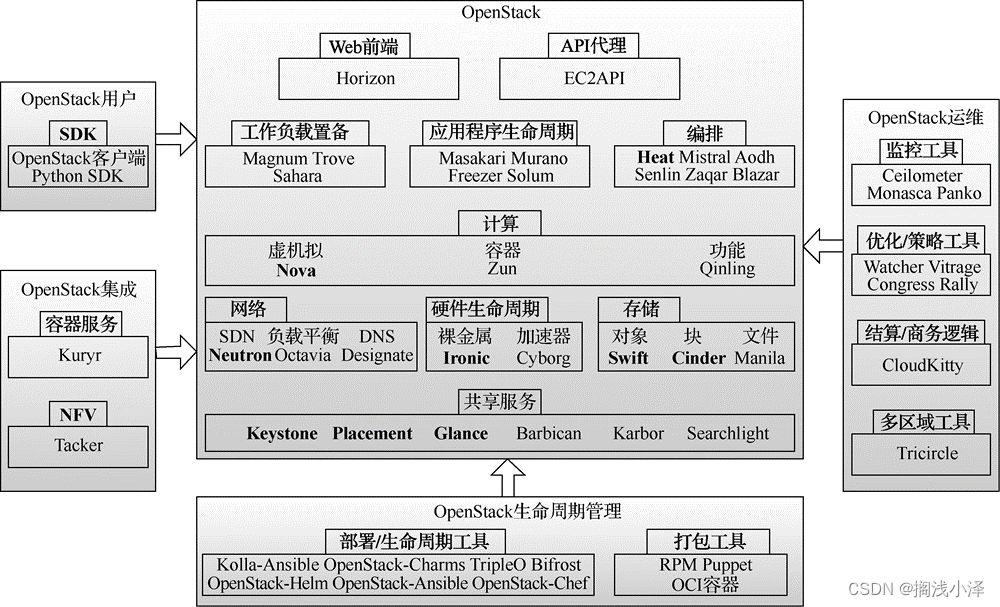
核心项目
•仪表板(Dashboard)——Horizon
•计算服务(Compute Service)——Nova
•网络(Networking)——Neutron
•对象存储(Object Storage)——Swift
•块存储(Block Storage)——Cinder
•身份服务(Identity Service)——Keystone
•镜像(Image Service)——Glance
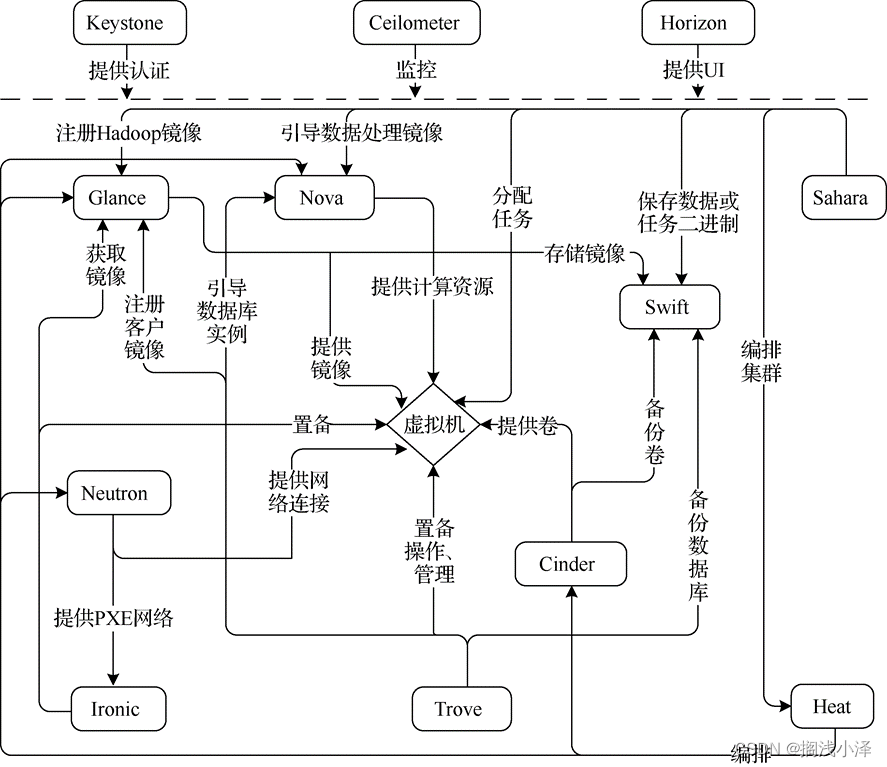
6• OpenStack 的概念架构
7.• OpenStack 的逻辑架构
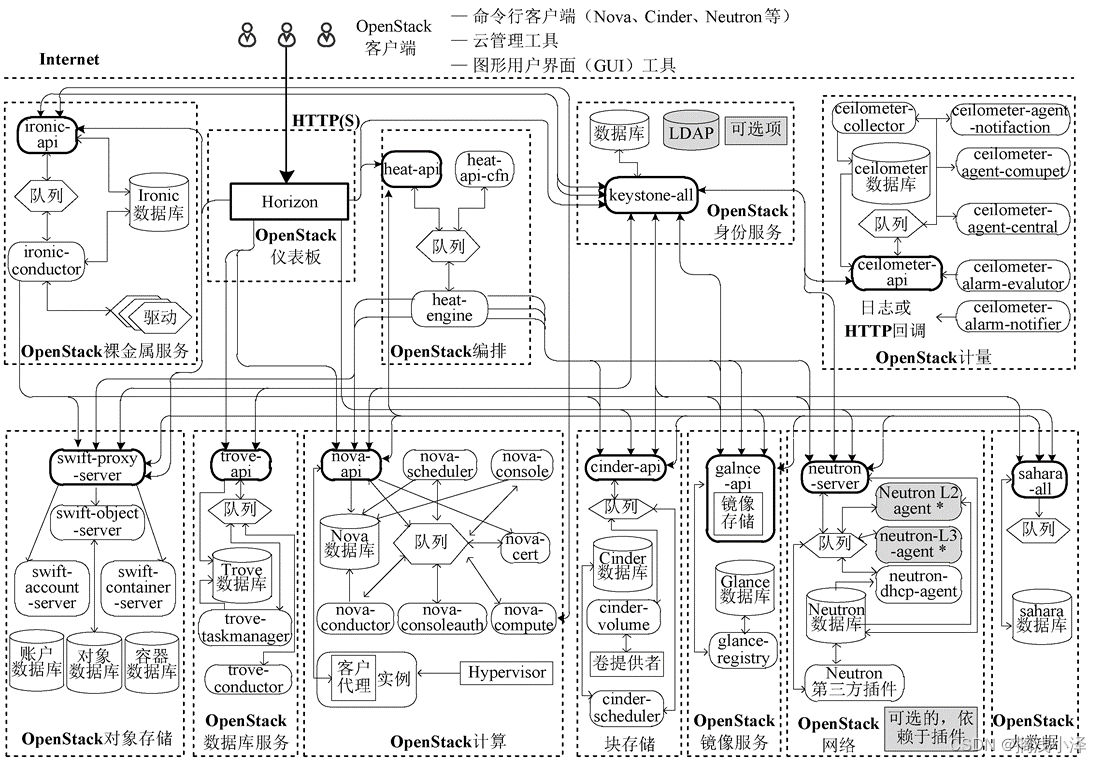
8•OpenStack组件之间的通信机制
•基于AMQP——每个项目内部各个组件之间的通信。
•基于SQL——各个项目内部的通信。
•基于HTTP——通过各项目的API建立的通信。
•通过Native API实现通信——OpenStack各组件和第三方软硬件之间的通信。
9•OpenStack的物理部署架构
•单节点部署
•多节点部署
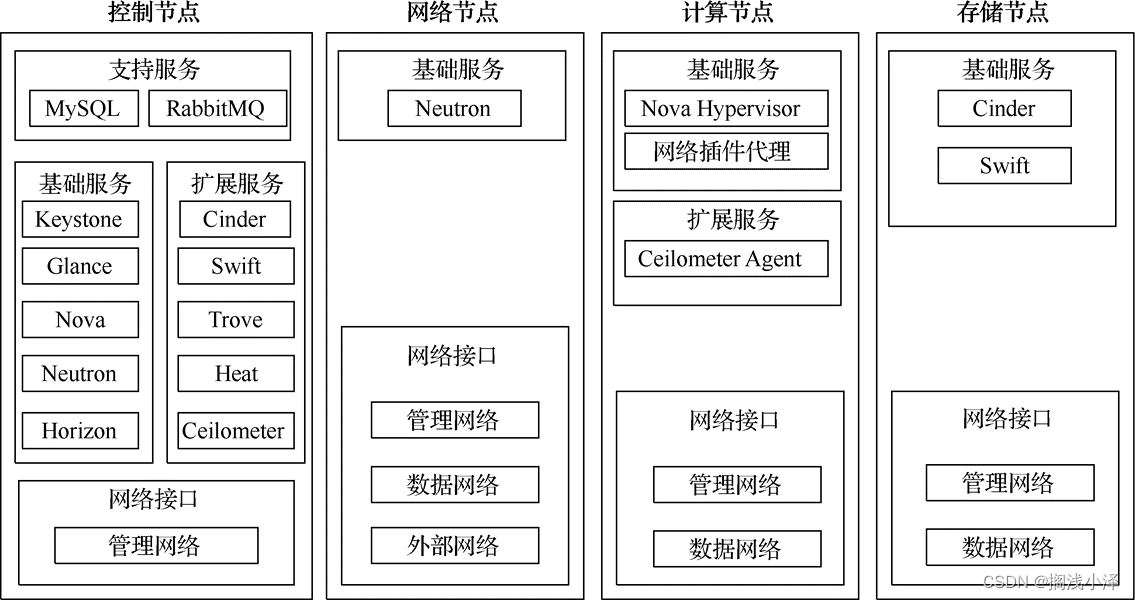
10•OpenStack的物理网络类型
•外部网络(External Network)——公共网络,外部或Internet可以访问的网络。
•管理网络(Management Network)——用于实现OpenStack各个组件之间的内部通信,并提供API访问端点。
•API 网络——用于为用户提供OpenStack API。
•数据网络——用于云部署中内部数据流。
11•了解部署OpenStack的技术需求
•Linux操作系统的安装、管理与运维。
•数据库系统的安装、配置、管理和优化。
•计算机虚拟化技术,重点是KVM与Libvirt套件。
•网络设备,包括网桥、交换机、路由器和防火墙。
•组网技术,包括DHCP、VLAN和iptables。
•存储技术,包括文件系统、LVM、分布式存储。
•Shell脚本及其编程。