鞍山市网站建设做软件项目的网站
文章目录
- 前言
- 一、项目需求
- 二、环境介绍
- 三、关键点
- 四、主框架分析
- 总结
前言
各位小伙伴,在蛰伏了将近有半年的时间又要和大家分享新的知识了,这次和大家分享的是一个项目,因此呢我准备分项目阶段去和大家分享,希望大家都能够在每一期的分享中有所收获;想要学习的小伙伴可以关注私信我,项目资料都是可以和大家一起分享的!
每个项目的用户最终都需要去切身的体验项目的产品,因此纵使技术千万种 ,能适应客户的需求才是王道,记住,适应客户的需求才是王道;在项目设计中其实最重要的一部分就是确定好用户的需求,主要是为了前中后期避免走一些弯路;每个阶段的项目负责人和项目具体执行者也能够明确自己的目标,把效率最大化;
在这里呢,我也不想展现自己就有多么厉害,我其实也就是一个正在学习嵌入式的学习者,分享这个项目一方面是为了巩固复盘项目,巩固基础知识,另一方面就是希望能够帮助到更多手头没有项目学习的、正在努力备战的小伙伴们!希望我的分享能够帮助到你们;
做CSDN硕士,未来前途一片光明,加油!哈哈哈!
一、项目需求
由于这个项目是一个智能安防监控的项目,所以项目的大致需求如下,大家看看有啥需要扩展的哈:
(1)网页下发命令可以控制硬件设备;
(2)硬件采集数据上传至网页;
(3)网页可以实时观测现场状况;
(4)网页能够实现控制zigbee终端节点;
(5)发生意外状况时进行手机短信报警;
其实上述的需求是不是更像是具体的模块实现呢,确实,其实实现的就是一个能够实时监控现场环境信息,能够通过终端能够控制硬件,有意外情况能够进行警报提醒的一个智能安防的项目;
二、环境介绍
使用的环境是Ubuntu 12.04,内核版本是linux-3.14.0
硬件环境:A9平台(华清远见FS4412)
联调测试的环境是Ubuntu + SecureCRT,SecureCRT是一个串口输出终端,大家可以根据自己手头有的串口终端进行合理搭配即可;但是,哈哈哈,但是来了,但是这个Ubuntu必须安装tftp和nfs服务器,并且我们必须配置好Ubuntu的IP,要求Ubuntu的IP地址必须和板子的IP地址在同一网段;nfs服务器能够挂载根文件系统,从而实现在串口终端直接打印并且直接调试运行;这样开发的效率是非常高的;
注意:这里需要注意的是内核版本一定得选择正确,内核过低会导致A9平台上的很多硬件跑不起来;
三、关键点
(1)巩固共享内存,消息队列和信号量等进程间通信机制,锁的互斥机制;
(2)将驱动开发、应用层开发和网页设计结合在一起;
(3)项目开发中的需求拆解过程,学习分层意识、指令下发和数据上传的思想;
(4)写bug,找bug,解决bug;
(5)使用zigbee模块和gprs模块;
四、主框架分析
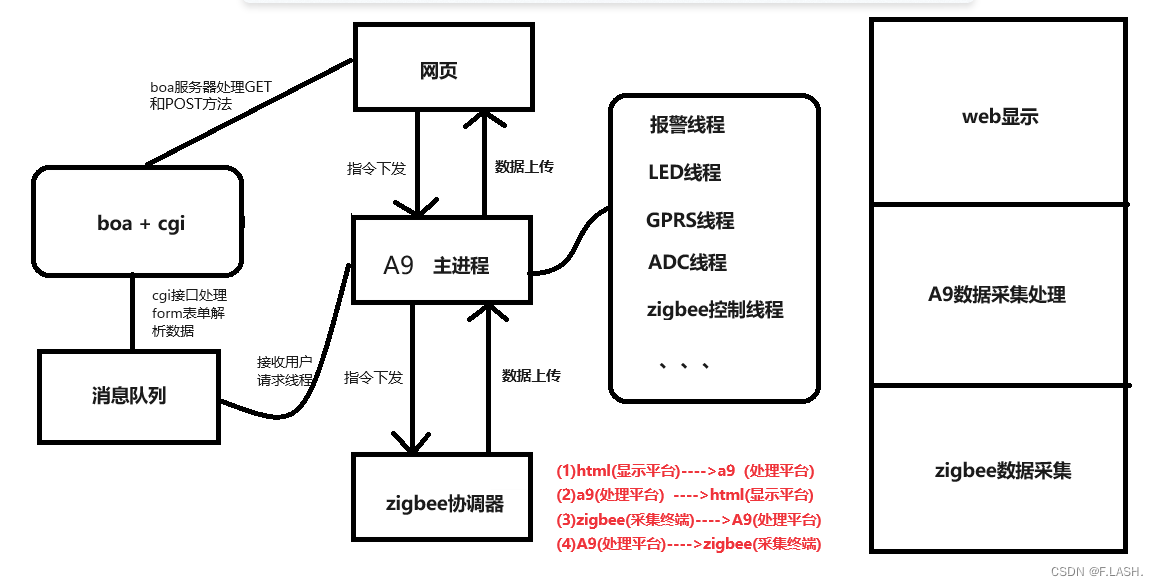
软硬件框架解析:
1.html—>A9
(1)html下发指令后,A9下boa服务器响应,通过cgi接口进行数据解析并且生成返回的html网页;
(2)boa服务器响应后,cgi将web指令发送至消息队列,请求线程进行消息队列中消息的读取,进而判断唤醒哪一个线程,从而实现操作硬件;
2.A9---->html
A9的数据采集线程将数据发送至共享内存,通过信号量机制实现数据上传至cgi接口,进而通过cgi+boa服务器将数据上传至web;
注意:boa + cgi是沟通A9和html的桥梁
3.zigbee---->A9
zigbee作为数据采集终端,将数据发送至协调器,协调器通过串口上传至A9,紧接着怎么样到网页呢,哈哈哈,是不是又是A9—>html了;
4.A9---->zigbee
这个操作呢是为了控制zigbee的终端节点,比如打开一些具体设备,比如风扇,灯等;指令的下发是通过A9串口编程实现的,紧接着通过协调器发送至终端节点;
总结
到这里呢,基本上这个项目的所有框架流程基本解析完毕,希望各位小伙伴们仔细领会,最后呢是不是大家没有见到硬件的真容,有点遗憾,哈哈哈,下图给大家展示一下:


最后,各位小伙伴们如果有收获,可以点赞收藏哦,你们的认可是我创作的动力,一起加油!