全国知名网站建设公司网站开发平面设计师岗位要求
文章目录
- 1 起源
- 2 备份架构
- 2.1 生活照片
- 2.2 生活录音
- 2.3 微信文件
- 2.4 工作文件
- 2.5 笔记、影视音乐、书籍
- 3 使用工具介绍
- 3.1 小米云服务
- 3.2 中国移动云盘
- 3.3 小米移动硬盘(1T)
- 3.4 FreeFileSync
- 4 总结

1 起源
本文的灵感源于我个人的一次不幸遭遇:我的上一台手机内存突然损坏,无法开机,导致我无法进行数据转移。这次经历使我深切地认识到,个人数据的重要性远超过手机本身。一个小小的意外,就可能导致数据的永久丢失。因此,构建一个完整的个人数据备份方案显得尤为重要。经过几天的尝试和摸索,我形成了自己的备份架构,并在此分享给大家。在此过程中,我诚挚地欢迎各位读者提出宝贵的建议。
可能会有些读者建议使用NAS(网络附加存储)设备来备份数据。虽然我曾经考虑过这个方案,但考虑到学生阶段时间、金钱和精力有限,以及没有一个固定且安全的主机存放场所,我最终放弃了这一方案。
2 备份架构

我将个人数据分为七大部分,分别是:生活照片、生活录音、微信文件、工作文件、笔记、影视音乐和书籍。这样的分类是为了更清晰地整理和保护个人数据,以便随时访问和使用。
2.1 生活照片

生活照片和视频主要来源于手机相机和微信。为了方便管理和备份这些数据,我启用了手机系统级的云服务(小米云服务),并开启了自动同步功能。现在,各大手机厂商也都有类似的云服务功能。需要注意的是,手机存储和云端存储是双向同步的,也就是说,如果从其中一端删除了数据,另一端也会同步删除。那么,同步的主要作用是什么呢?我认为主要是为了方便多设备之间的互联互通,确保数据在所有设备上都是一致的,同时云服务的回收站的功能也有一定程度上防止数据丢失的作用,但作用不大。
为了解决数据同步和备份的问题,我选择使用中国移动云进行自动手机相册备份。这种备份方式采用了更新备份逻辑,手机端进行的操作不会影响云端的数据,从而确保了数据在中国移动云上是最完整的。当然,用户也可以选择其他的第三方云服务,比如百度云、阿里云、夸克等。我之所以选择中国移动云,主要是因为我的移动手机号每月赠送VIP会员,具有一定的价格优势。
为了确保数据的安全,我还使用了移动硬盘进行物理存储。每个月我都会从小米云服务上下载相册的照片和视频数据,并备份到硬盘中。这样的操作可以确保数据的完整性和可恢复性。
2.2 生活录音

生活录音主要包括电话录音和微信电话录音。每次保存电话录音后,小米云服务会自动进行同步。同时,中国移动云盘也会对录音数据进行备份。与相册一样,我每个月都会从小米云服务上下载录音数据,并保存在移动硬盘中。这样的操作可以确保录音数据的完整性和可恢复性。
2.3 微信文件
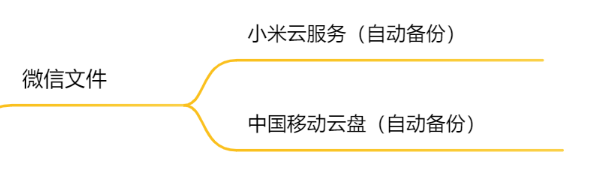
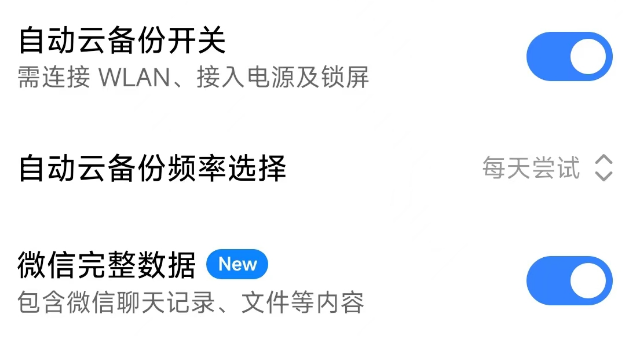
对于微信聊天数据的备份,一直以来都没有很好的解决方案。第三方云盘通常只能备份微信的图片和文件,无法备份详细的聊天数据。因此,我选择使用中国移动云盘来备份微信中的图片和文件。同时,小米云服务也推出了备份微信聊天数据的功能,这对我而言是一个很好的补充。
2.4 工作文件
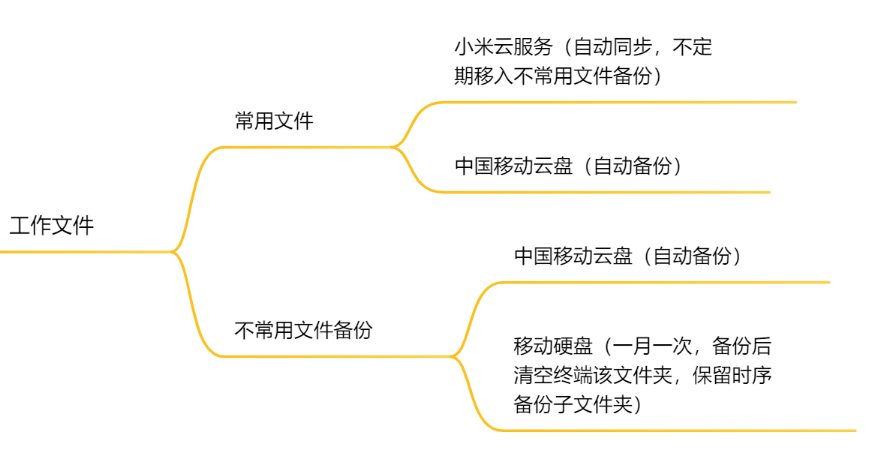
工作文件主要存储在电脑上,分为常用文件和不常用文件。在完成一个工作周期后,我会将文件移至不常用文件夹。小米云服务在PC端也提供了云同步功能,实现了电脑数据与手机数据的互通。同时,我使用中国移动云盘对不常用文件夹进行自动备份,这样在电脑使用过程中可以轻松完成数据备份。此外,我每个月还会使用FreeFileSync工具将数据备份到移动硬盘中,该工具可以方便地进行数据更新同步。
2.5 笔记、影视音乐、书籍
对于笔记和书籍,我通常使用小米自带的笔记和阅读应用,因此可以方便地使用小米云服务进行备份。影视音乐方面,我主要存储一些观看的电影、电视剧和综艺节目,这些资料可以直接通过中国移动云盘进行存储。这样的存储方式简化了我的备份工作,提高了数据管理的效率和便捷性。
3 使用工具介绍
3.1 小米云服务
我使用的是小米手机,为了实现系统级别的数据备份,我选择了小米云服务。小米云服务主要提供三个功能:云备份、小米云盘和回收站。在云备份方面,我主要利用它来备份微信数据。同时,小米云盘则用于PC端和手机端的数据同步,以便在不同的设备间轻松访问和传输数据。这些功能使得我能够更方便地进行数据备份和同步,提高了数据的安全性和可访问性。
在价格方面,我在米粉节购买了小米云服务,价格相对较为划算。对于我的需求而言,70GB的存储空间已经足够。当然,用户也可以根据自己的需求选择不同的云服务。一般来说,各大手机厂商都会提供类似的云服务功能,用户可以根据自己的手机品牌选择相应的云服务。
3.2 中国移动云盘
我相信许多人都使用过百度网盘,实际上,市面上的第三方网盘在功能和操作上都是类似的。选择哪家网盘,很大程度上是以价格为核心的考虑因素。我之所以选择中国移动云,是因为我的移动手机号套餐附带了免费的网盘VIP服务(5G通行证)。相较于其他网盘的收费模式,这一免费提供的服务为我节省了一笔不小的开销。同时,中国移动作为国内知名的通信运营商,其网盘服务在稳定性、安全性和速度上都有着较高的保障。综合考虑价格和实用性,我认为中国移动云是一个非常不错的选择。当然,用户也可以根据自己的需求和预算,选择适合自己的第三方网盘服务。

除了个人云服务,中国移动云盘还提供了家庭云功能。这一功能非常实用,特别适合家庭或小组成员之间共享和协作。通过家庭云,我们可以轻松地设置共享文件夹,邀请家庭成员加入,并实时同步文件。这大大方便了家庭成员之间的文件传输和共享,减少了因设备或地域差异导致的沟通障碍。而且,家庭云还提供了足够的存储空间,能够满足一个家庭的日常存储需求。在使用过程中,家庭云展现出了出色的稳定性和安全性,确保了数据的安全传输和存储。因此,我非常推荐使用中国移动云盘的家庭云功能,它为家庭用户提供了一个高效、便捷的存储和共享解决方案。
3.3 小米移动硬盘(1T)
在选择硬盘时,我主要考虑了几个因素。首先,该硬盘的外观设计吸引了我,它具备了较高的颜值,简洁而美观,符合我的审美要求。其次,该硬盘具备高速传输的特点,读写速度高达2000MB/S,这能够满足我在处理大量数据时的需求,提高工作效率。此外,该硬盘的兼容性也相当出色,能够与多种设备完美兼容,方便我在不同设备之间传输数据。当然,在选择硬盘时,用户也可以根据自己的预算进行选择。如果预算有限,选择一款性价比较高的机械硬盘也是一个不错的选择。重要的是,用户应该根据自己的实际需求来选择适合自己的硬盘,以确保数据的安全和稳定传输。
3.4 FreeFileSync
FreeFileSync是一款免费且开源的文件同步工具,适用于Windows操作系统。它可以帮助用户轻松地同步和备份不同文件夹之间的文件,确保数据的一致性和完整性。
FreeFileSync具有简单易用的界面和直观的向导,让用户能够快速设置和执行文件同步任务。用户可以选择要同步的源文件夹和目标文件夹,并定义同步规则,如只同步新增或修改的文件、删除多余文件等。
与其他文件同步工具相比,FreeFileSync的独特之处在于它支持双向同步,即同时将源文件夹与目标文件夹进行对比和更新,以确保两者之间的数据一致。此外,它还支持多种同步模式,如镜像同步、增量同步等,以满足不同用户的需求。
FreeFileSync还提供了丰富的设置选项,让用户能够根据自己的需求自定义同步过程。用户可以选择是否覆盖目标文件夹中的同名文件、是否删除多余文件等,以确保数据的安全性和完整性。
总的来说,FreeFileSync是一款功能强大、易于使用的文件同步工具,可以帮助用户轻松地管理和备份重要数据。无论是个人用户还是企业用户,都可以通过FreeFileSync来确保数据的安全和一致性。

4 总结
通过以上的描述,我们可以看到,无论是从备份方案的选择、存储工具的挑选,还是具体应用的体验,我都进行了深入的探讨和分享。我希望能通过我的经验,帮助大家更好地理解和解决个人数据备份的问题,让大家在数字时代更有安全感。大家也可以说说自己的备份方案。
