免费网站建设招商网站策划怎么写
项目干系人管理是项目管理中的重要一环,识别和管理好项目干系人是成功实施项目的关键之一。本文将介绍4321项目干系人识别方法、干系人等级册以及五步判断法等工具,帮助项目经理更好地识别和管理项目干系人。同时,本文还将介绍干系人能量方格和软硬兼施策略,以应对复杂难缠的干系人。通过运用这些工具和方法,项目经理可以更好地管理项目干系人,提高项目成功率。
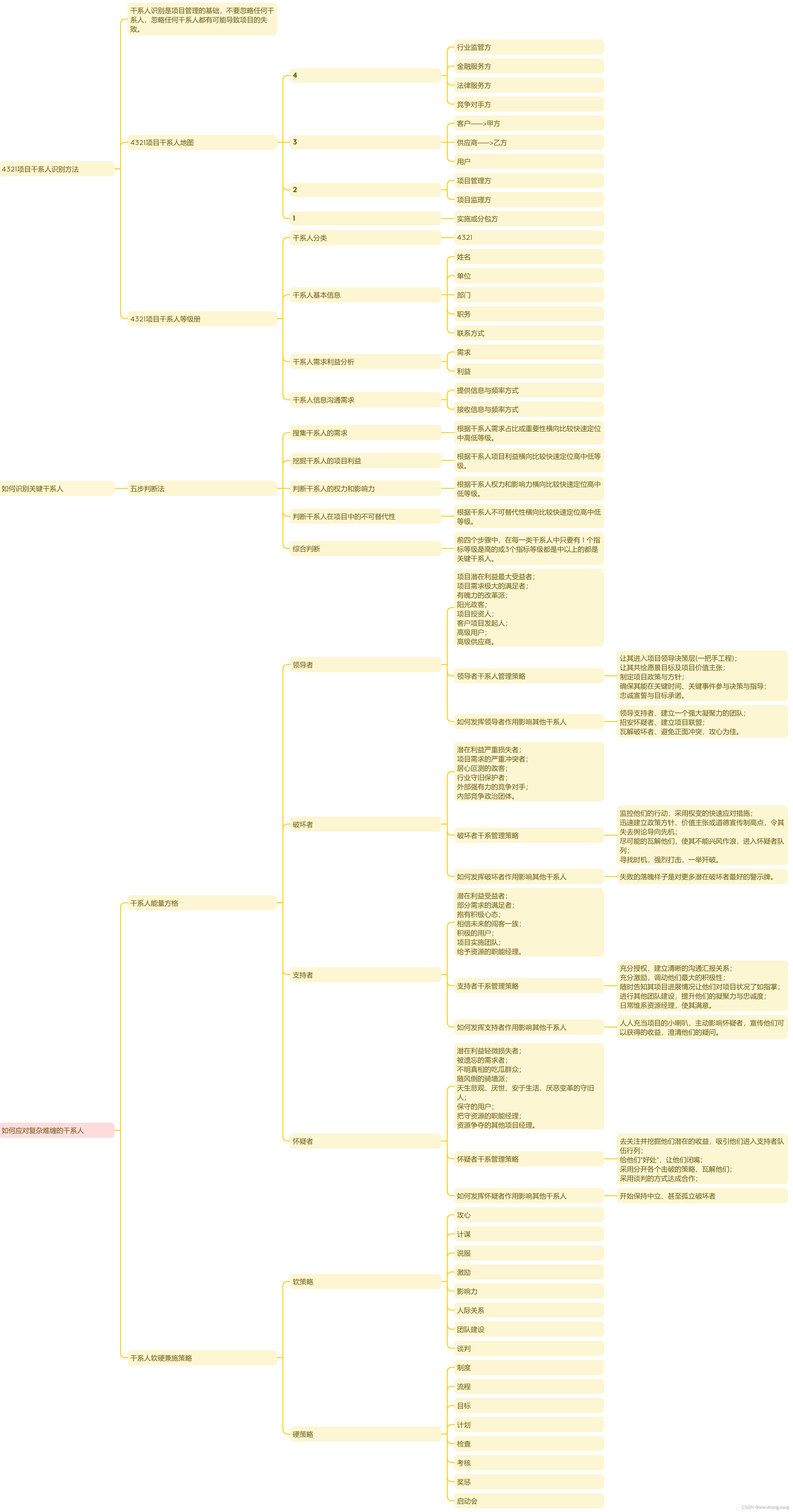
4321项目干系人识别方法
干系人识别是项目管理的基础,不要忽略任何干系人,忽略任何干系人都有可能导致项目的失败。
4321项目干系人地图
- 4
- 行业监管方
- 金融服务方
- 法律服务方
- 竞争对手方
- 3
- 客户——>甲方
- 供应商——>乙方
- 用户
- 2
- 项目管理方
- 项目监理方
- 1
- 实施或分包方
4321项目干系人等级册
- 干系人分类
- 4321
- 干系人基本信息
- 姓名
- 单位
- 部门
- 职务
- 联系方式
- 干系人需求利益分析
- 需求
- 利益
- 干系人信息沟通需求
- 提供信息与频率方式
- 接收信息与频率方式
如何识别关键干系人
五步判断法
- 搜集干系人的需求
- 根据干系人需求占比或重要性横向比较快速定位中高低等级。
- 挖掘干系人的项目利益
- 根据干系人项目利益横向比较快速定位高中低等级。
- 判断干系人的权力和影响力
- 根据干系人权力和影响力横向比较快速定位高中低等级。
- 判断干系人在项目中的不可替代性
- 根据干系人不可替代性横向比较快速定位高中低等级。
- 综合判断
- 前四个步骤中,在每一类干系人中只要有 1 个指标等级是高的或3个指标等级都是中以上的都是关键干系人。
如何应对复杂难缠的干系人
干系人能量方格
- 领导者
- 项目潜在利益最大受益者; 项目需求极大的满足者; 有魄力的改革派; 阳光政客; 项目投资人; 客户项目发起人; 高级用户; 高级供应商。
- 领导者干系人管理策略
- 让其进入项目领导决策层(一把手工程); 让其共绘愿景目标及项目价值主张; 制定项目政策与方针; 确保其能在关键时间、关键事件参与决策与指导; 忠诚宣誓与目标承诺。
- 如何发挥领导者作用影响其他干系人
- 领导支持者、建立一个强大凝聚力的团队; 招安怀疑者、建立项目联盟; 瓦解破坏者、避免正面冲突,攻心为佳。
- 破坏者
- 潜在利益严重损失者; 项目需求的严重冲突者; 居心叵测的政客; 行业守旧保护者; 外部强有力的竞争对手; 内部竞争政治团体。
- 破坏者干系管理策略
- 监控他们的行动,采用权变的快速应对措施; 迅速建立政策方针、价值主张或道德宣传制高点,令其失去舆论导向先机; 尽可能的瓦解他们,使其不能兴风作浪,进入怀疑者队列; 寻找时机,强烈打击,一举歼破。
- 如何发挥破坏者作用影响其他干系人
- 失败的落魄样子是对更多潜在破坏者最好的警示牌。
- 支持者
- 潜在利益受益者; 部分需求的满足者; 抱有积极心态; 相信未来的闯客一族; 积极的用户; 项目实施团队; 给予资源的职能经理。
- 支持者干系管理策略
- 充分授权,建立清晰的沟通汇报关系; 充分激励,调动他们最大的积极性; 随时告知其项目进展情况让他们对项目状况了如指掌; 进行其他团队建设,提升他们的凝聚力与忠诚度; 日常维系资源经理,使其满意。
- 如何发挥支持者作用影响其他干系人
- 人人充当项目的小喇叭,主动影响怀疑者,宣传他们可以获得的收益,澄清他们的疑问。
- 怀疑者
- 潜在利益轻微损失者; 被遗忘的需求者; 不明真相的吃瓜群众; 随风倒的骑墙派; 天生悲观、厌世、安于生活、厌恶变革的守旧人; 保守的用户; 把守资源的职能经理; 资源争夺的其他项目经理。
- 怀疑者干系管理策略
- 去关注并挖掘他们潜在的收益,吸引他们进入支持者队伍行列; 给他们“好处”,让他们闭嘴; 采用分开各个击破的策略,瓦解他们; 采用谈判的方式达成合作;
- 如何发挥怀疑者作用影响其他干系人
- 开始保持中立、甚至孤立破坏者
干系人软硬兼施策略
- 软策略
- 攻心
- 计谋
- 说服
- 激励
- 影响力
- 人际关系
- 团队建设
- 谈判
- 硬策略
- 制度
- 流程
- 目标
- 计划
- 检查
- 考核
- 奖惩
- 启动会
总之,在项目管理中,识别和管理项目干系人是成功实施项目的关键之一。通过运用4321项目干系人地图和等级册等工具,以及采用五步判断法和干系人能量方格等策略,项目经理可以更好地管理项目干系人,提高项目成功率。同时,在管理项目干系人时,需要灵活运用软硬兼施策略,根据不同情况采取不同策略,以达到最佳效果。