网站后台制作用的软件网站热点关键词
在城市交通体系中,地铁作为一种快速、便捷的公共交通方式,已经成为现代都市生活的重要组成部分。而地铁票务系统的技术架构,则是支撑地铁运营的核心之一。本文将深度解析地铁票务系统的技术架构与创新应用,从系统设计、数据管理、安全保障等方面进行全面分析,探讨地铁票务系统在提升城市交通效率、优化乘客出行体验方面的重要作用。
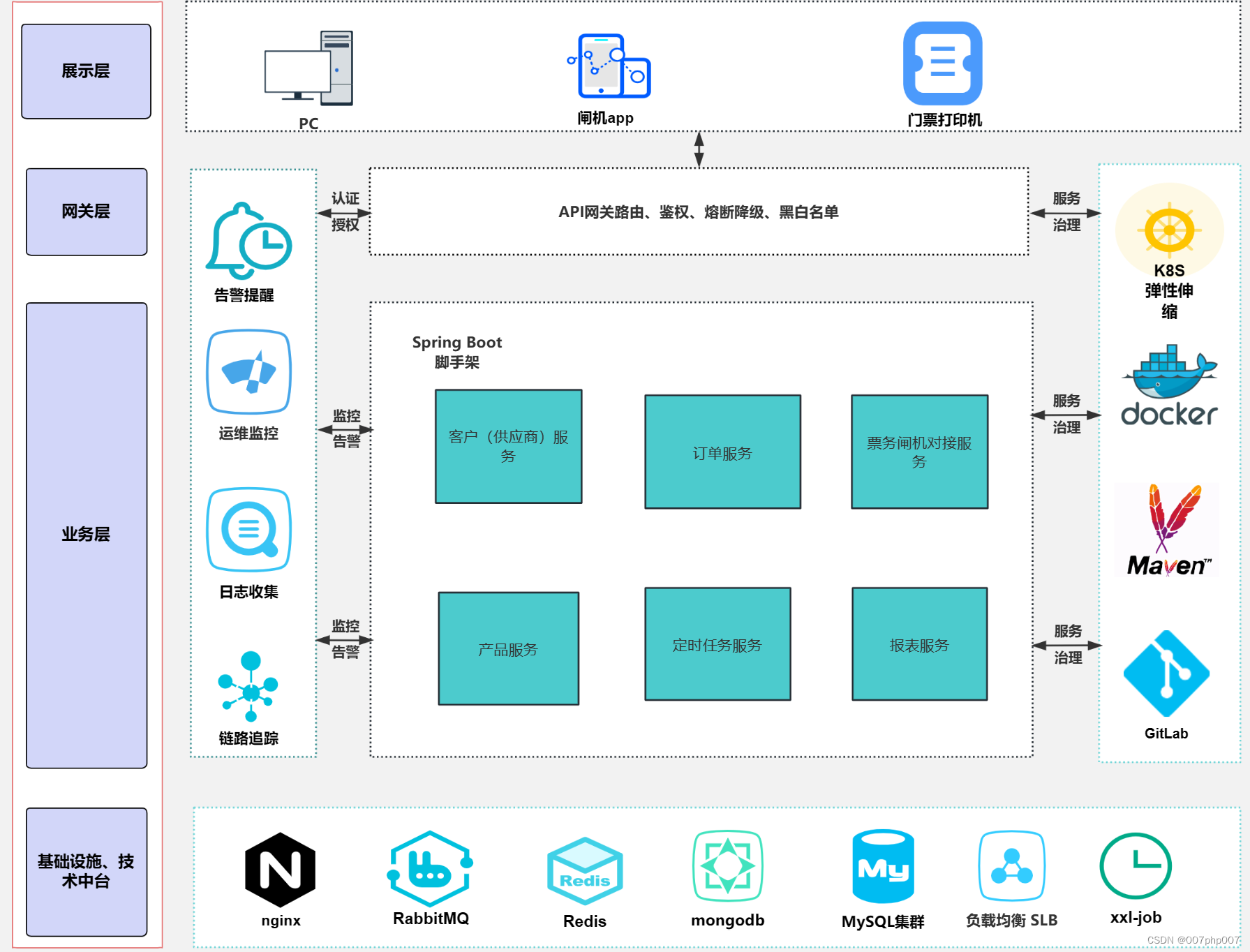
**系统设计与架构:**
地铁票务系统的设计与架构是保障地铁运营顺畅的基础。它包括票务系统的前端售票设备(如自动售票机、手机App等)、后台管理系统(包括票务管理、订单管理等)、车站设备(闸机、读卡器等)以及与列车通信的接口等组成部分。通过合理的系统设计和分层架构,实现票务数据的高效流转和安全运行。
**数据管理与处理:**
地铁票务系统涉及大量的数据管理与处理,包括乘客信息、票务信息、订单信息等。通过数据库管理系统、数据仓库以及实时数据处理技术,实现对数据的高效存储、查询和分析,为地铁运营提供数据支持和决策依据。
**安全保障与应对措施:**
地铁票务系统的安全保障是系统运行的重中之重。包括网络安全、数据安全、支付安全等多个方面。通过加密技术、权限控制、安全审计等手段,确保票务系统的安全可靠,防范各类安全风险和攻击威胁。
**创新应用与发展趋势:**
随着科技的发展和社会需求的变化,地铁票务系统也在不断创新与发展。例如,智能乘客识别技术、移动支付技术、人工智能应用等,都为地铁票务系统带来了新的应用场景和发展方向。未来,随着5G技术、物联网技术的广泛应用,地铁票务系统将更加智能化、便捷化,为城市交通带来更多的便利和效率提升。
综上所述,地铁票务系统的技术架构设计涉及多个方面,包括系统设计、数据管理、安全保障等,是地铁运营的重要保障和支撑。随着科技的不断创新和应用,相信地铁票务系统将在未来发挥更加重要的作用,为城市交通的发展和智能化建设做出积极贡献。