网站建设预期达到的效果柳南网站建设
docker安装看之前的文章
默认已经安装好docker并且配置没有问题
拉取项目
https://gitee.com/coder-msc/docker-node
本地跑一个看看
pnpm install
pnpm start
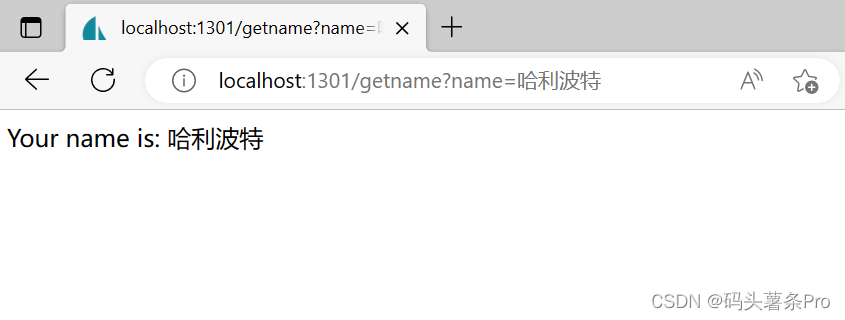
本地访问
http://localhost:1301/getname?name=%E5%93%88%E5%88%A9%E6%B3%A2%E7%89%B9
项目整个上传服务器
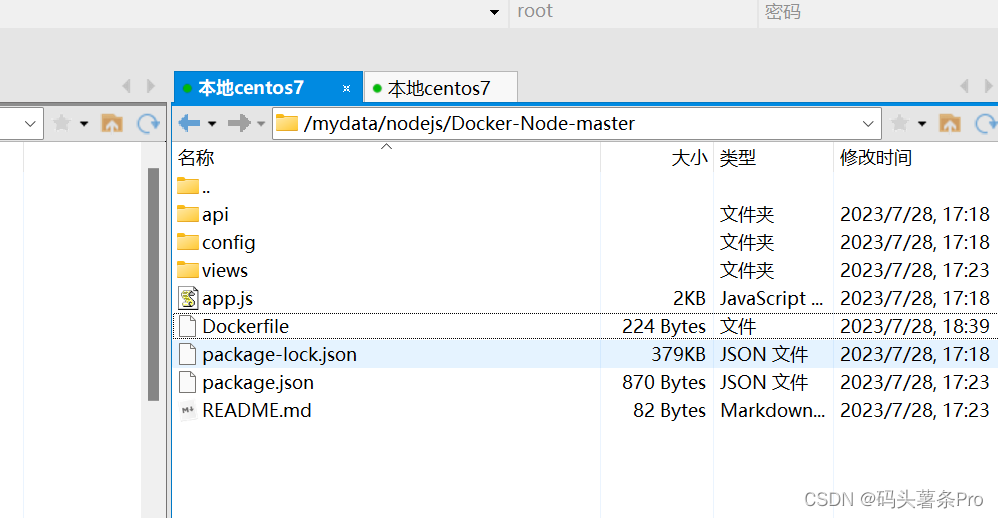
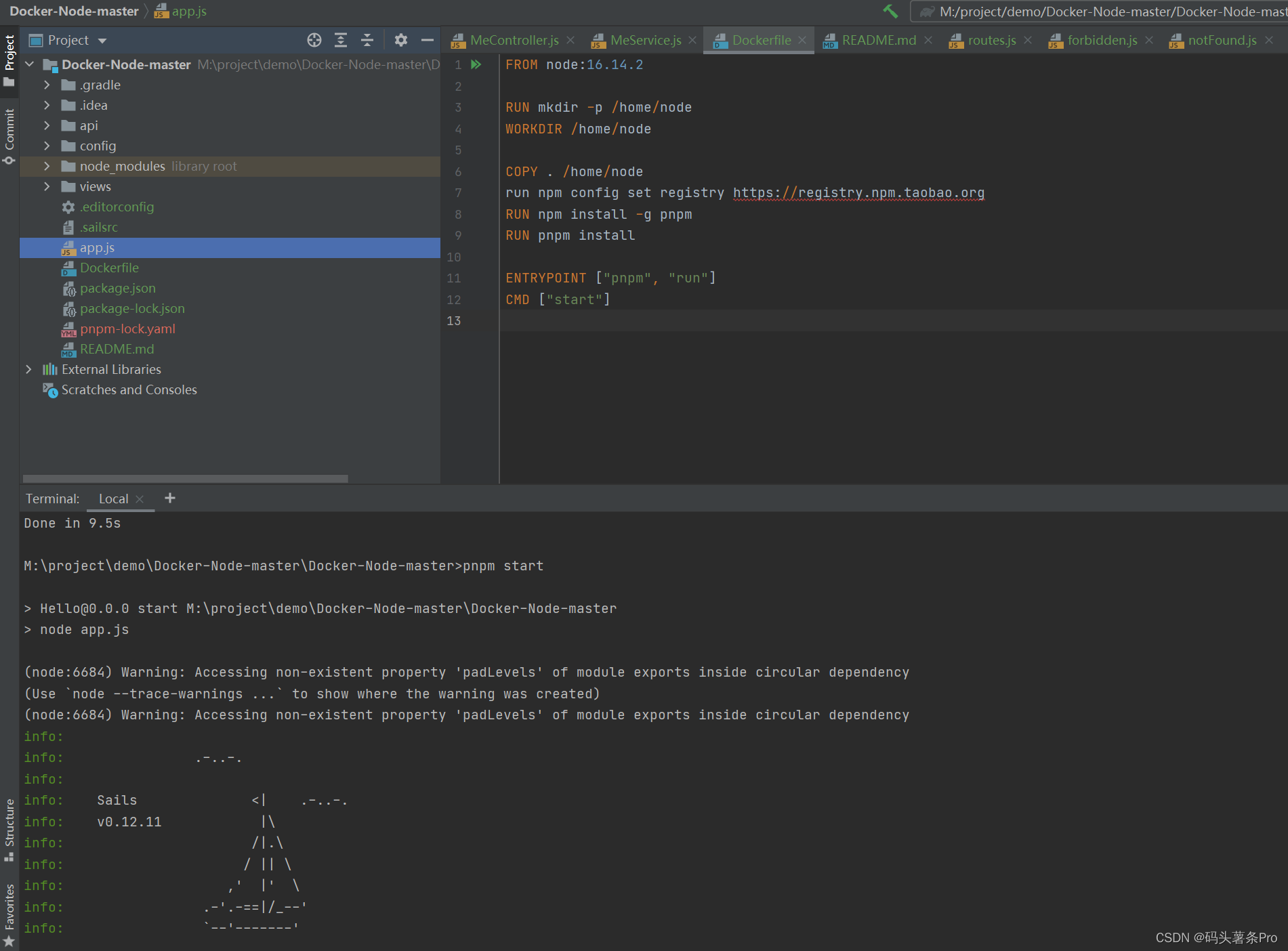
查看dockerfile
FROM node:16.14.2RUN mkdir -p /home/node
WORKDIR /home/nodeCOPY . /home/node
run npm config set registry https://registry.npm.taobao.org
RUN npm install -g pnpm
RUN pnpm installENTRYPOINT ["pnpm", "run"]
CMD ["start"]使用docker打包
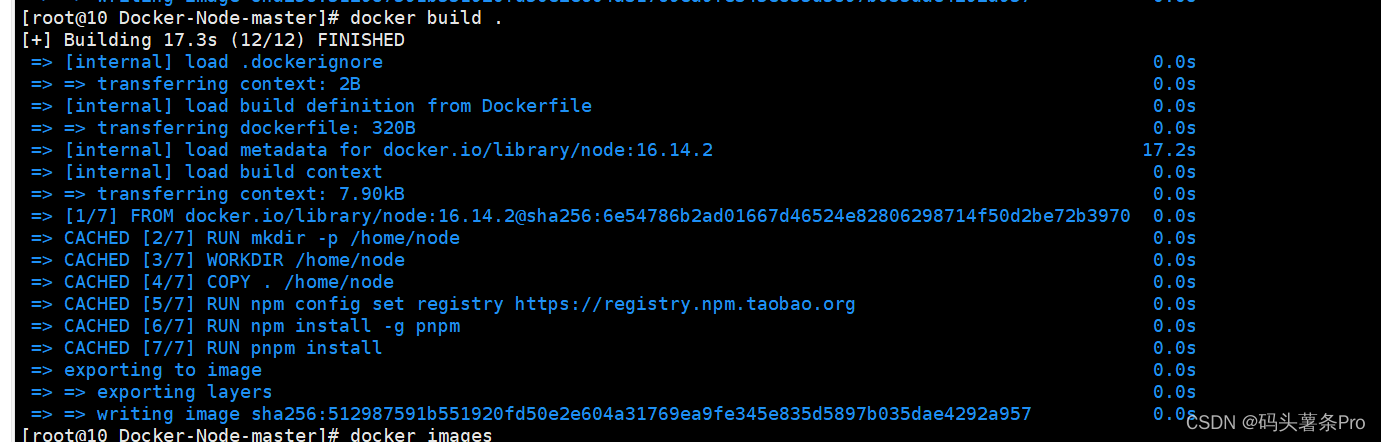
进入项目目录里面
docker build .
给镜像打tag:
docker tag b86282a8ba4c node-demo:v1.0.1
启动
docker run --name hello -p 1301:1301 -d node-demo:v1.0.1

命令说明
说明:1)给容器取名:--name hello,容器名字为:hello2)端口映射:-p 1301:1301:-p 本机端口:容器端口,1301是node.js代码中取的访问端口3)后台运行:-d在终端输入:docker ps , 查看我们创建的容器运行情况。
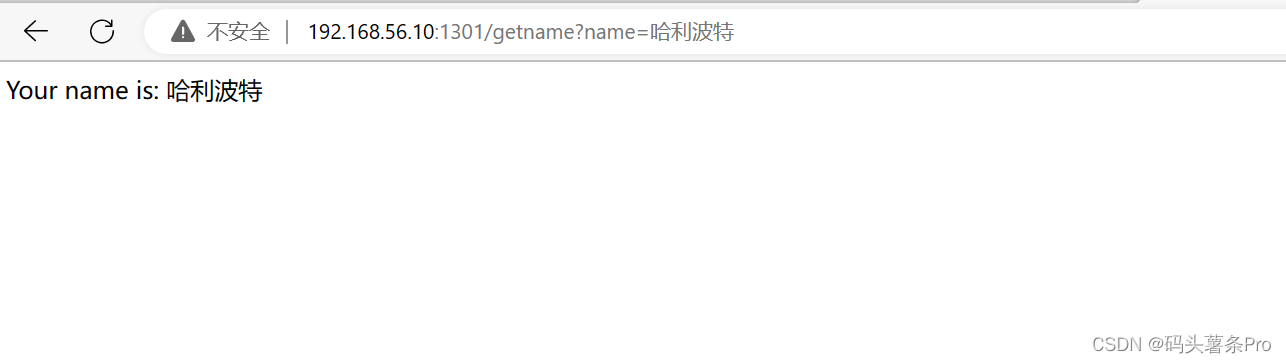
访问
http://192.168.56.10:1301/getname?name=%E5%93%88%E5%88%A9%E6%B3%A2%E7%89%B9
参考文章:
https://kxjvr6w8pu.feishu.cn/docx/UhsPd2GzuoDP3ex6MOgcKsvPn3g?from=from_copylink
https://blog.csdn.net/tornyLin/article/details/81477905