北京建站公司兴田德润专业wordpress电商主题
阅读本文您可以了解:1、销售自动化管理软件是什么;2、销售自动化管理软件的优势
一、销售自动化管理软件是什么
销售自动化管理软件是一种用于帮助企业有效管理销售流程和客户关系的工具。它集成了各种功能和工具,以简化和自动化销售团队的任务,从而提高销售效率、加强客户关系,并增加销售业绩。
这种软件或者系统能够解决许多与销售相关的问题,包括:
1、客户管理和跟踪:
销售团队需要与许多潜在客户和现有客户进行互动。销售自动化管理软件可以帮助记录客户信息、历史互动和购买记录,以便销售人员更好地了解客户需求,提供更个性化的服务。
2、销售流程优化:
从潜在客户的兴趣到最终的销售成交,整个销售过程包含多个步骤。这种软件可以自动跟踪和管理每个步骤,确保没有遗漏,提醒销售人员采取行动,从而加速销售周期。
3、任务和提醒管理:
销售工作需要及时的跟进和行动。该软件可以设置提醒和任务,确保销售团队不会错过任何重要的活动或联络。
4、报告和分析:
了解销售绩效和趋势对于制定战略决策至关重要。系统内能够生成各种报告和分析,帮助管理层了解销售团队的表现,找出成功的策略并进行改进。
5、客户沟通和互动:
销售自动化软件可以通过短信等方式自动发送营销资料、产品信息和跟进提醒,从而保持与客户的持续联系。
举个例子🌰:
可以搭配这个模板更好的理解 指路>>>>https://www.jiandaoyun.com 可免费在线安装
想象一家家电公司正在推出一款新的智能冰箱。他们使用了销售自动化管理软件来促进销售过程,整个流程当中该系统能够这样吧发挥作用:
1、潜在客户管理:
当有人在网站上表达对智能冰箱的兴趣时,销售自动化软件会自动创建一个潜在客户档案,并记录他们的联系信息、兴趣和互动历史。
2、销售流程优化:
一旦潜在客户进一步表达购买意向,软件会自动将他们移到销售流程的下一个阶段,例如安排产品演示或提供更多信息。
3、智能提醒管理:
如果销售人员需要在特定日期跟进客户,软件会发送提醒,确保不会错过任何机会。
4、报告和分析:
公司可以通过软件生成报告,了解哪些营销策略更成功,哪些地区的兴趣最大,从而调整营销战略。
5、客户互动:
软件可以自动发送电子邮件,介绍智能冰箱的特点,以及最新的促销活动,保持与客户的沟通。
通过使用销售自动化管理软件,这家家电公司能够更有效地追踪潜在客户,更好地管理销售流程,及时与客户互动,并最终提高他们的销售业绩。
二、销售自动化管理软件的优势
这里我将使用我们公司结合简道云CRM系统搭建的系统来具体说明其优势和特点。
模板指路>>>>https://www.jiandaoyun.com 可免费在线安装
1、客户信息集中管理:
- 所有客户信息、交互历史、购买记录都集中在一个系统中,销售人员可以轻松查看客户全貌,更深入了解其需求。
- 销售人员无需在不同系统之间切换,能够更快地作出反应,提供针对性的销售建议,增强客户满意度。
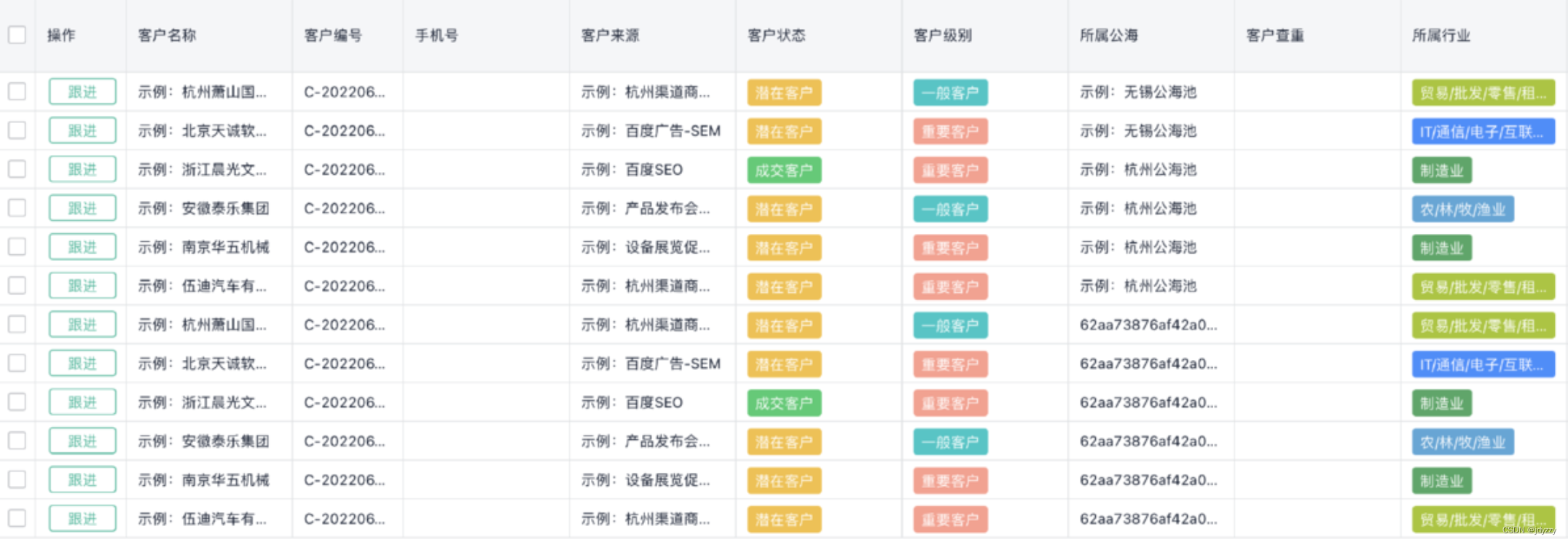
2、销售线索追踪:
- 能够自动捕捉潜在客户,自动导入CRM系统,确保销售人员不会错过任何潜在机会。
- 销售线索能够准确记录来源、兴趣点等信息,销售团队可以更精准地制定跟进策略,提高线索转化率。

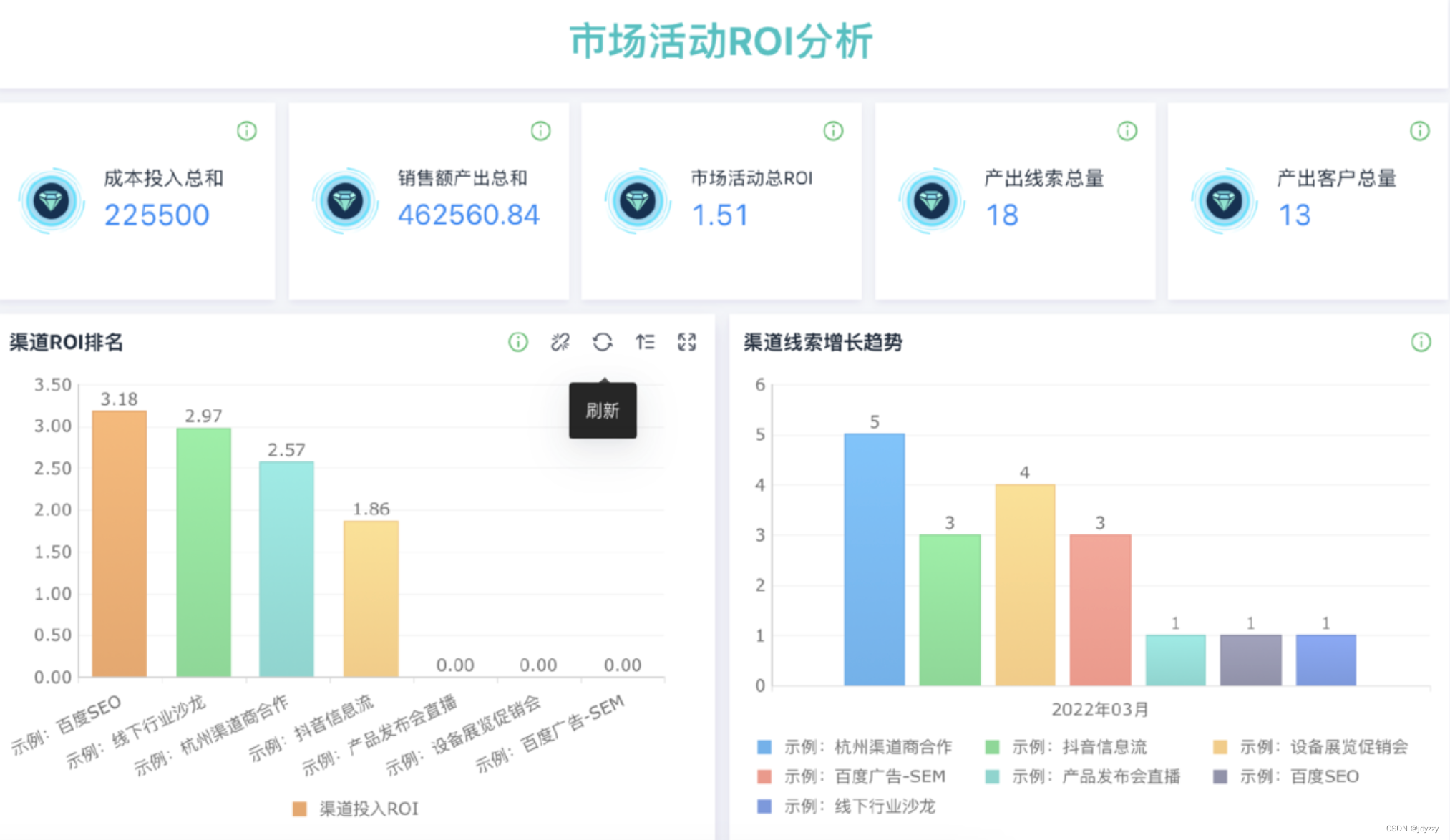
3、自动化营销活动:
- 基于客户行为和偏好,触发个性化的营销活动,提高客户参与度和购买意愿。
- 营销活动的自动化能够释放销售人员的时间,让他们专注于真正的销售活动,同时提高销售效果。
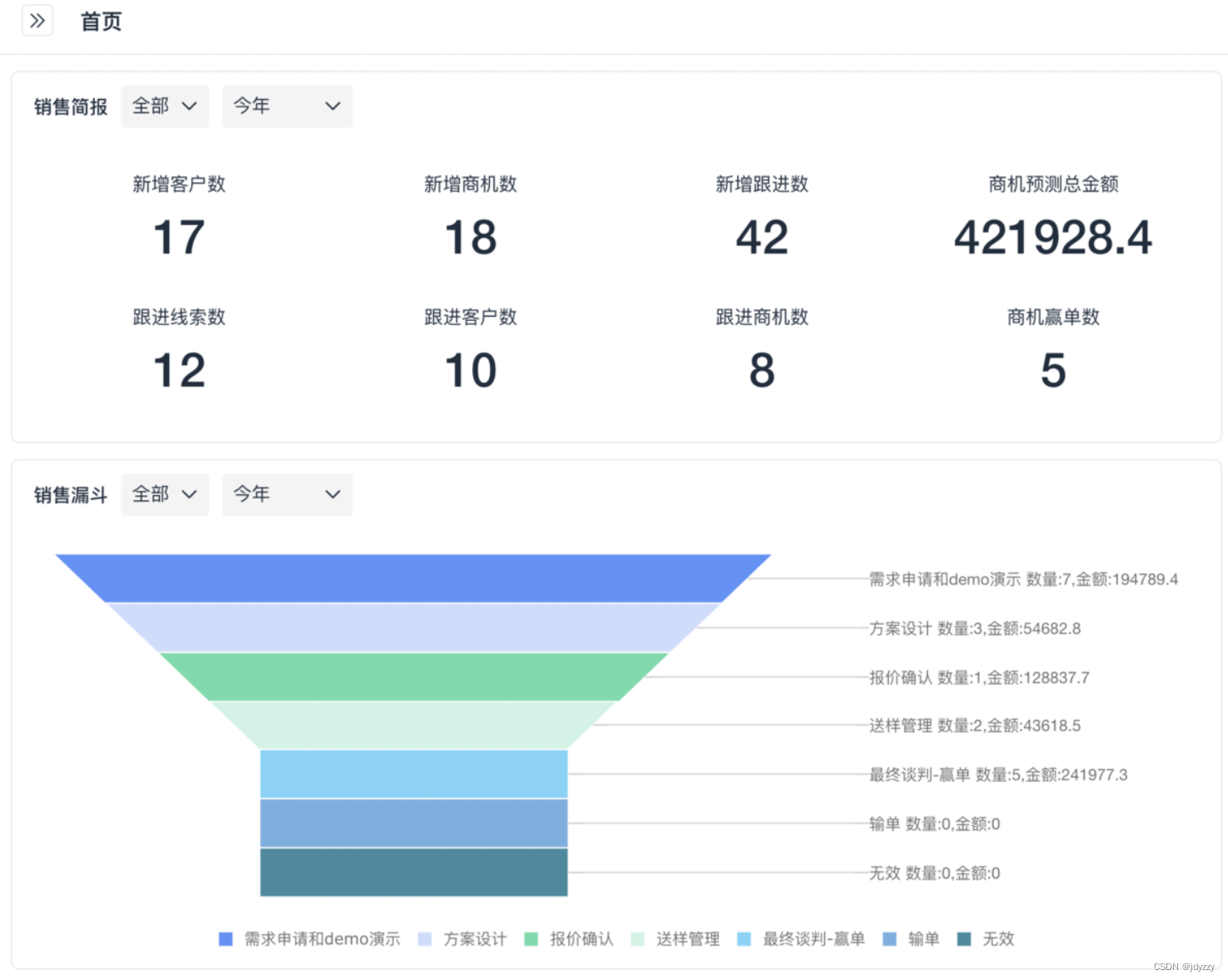
4、销售机会管理:
- 系统中的销售机会跟踪功能,帮助销售团队全程掌握销售流程,从初期洞察到最终成交。
- 销售人员可以及时了解销售机会的状态、障碍和所需行动,有利于优化销售策略,提高销售成功率。

5、销售预测和分析:
- 基于历史数据和趋势分析,提供准确的销售预测,帮助企业制定目标和计划。
- 销售预测让管理层更好地规划资源、制定策略,同时帮助销售团队在实际工作中有针对性地调整策略,以达到更好的业绩。

6、团队协作:
- 系统促进团队内部信息共享,减少信息断层,加强销售团队之间的协作。
- 增销售团队成员之间能够更好地合作、交流,共同解决问题,确保每位销售人员都在同一个页面上工作。

7、自动化任务和提醒:
- 自动设置任务和提醒,确保销售人员及时跟进,不会遗漏任何重要的销售活动。


以上就是我们利用简道云CRM系统搭建的销售自动化管理软件的优势。
最后我们再看一个具体的企业案例,是如何利用这套系统实现效益最大化的。
领科物联网科技有限公司(以下简称“领科物联网”)是一家全球 IOT 连接解决方案提供商,也是SIM技术的市场领导者。公司成立伊始,总经理就开始寻找一款能够满足企业个性化需求的数字化系统。试用了市面垂直领域的各大产品后,发现每个产品都存在各种各样的痛点问题,比如有的产品移动端差或者电脑端操作差、或者是数据的导入导出麻烦、流程协作差等,导致产品无法完美贴合企业实际业务需求。
带着以上问题,公司引进了简道云零代码搭建平台,发现能够较好地匹配企业的需求。
领科物联网的CRM流程:市场导入线索,销售人员通过跟进判断线索质量和客户需求,逐步转换客户、新建商机、生成销售单。

在销售成单过程中,需要多部门配合协同来配合促成订单,企业通过CRM商机模块的许多功能大大提高了部门间的合作效率。
以上。